Изобретение относится к роботостроению, может быть использовано для механизации и автоматизации погрузочно-раз- грузочных работ, выполнения различных технологических, транспортных операций, в том числен строительных.
Целью изобретения является повышение надежности и расширение технологических возможностей за счет работы с крупногабаритными изделиями сложной конфигурации, имеющими монтажные петли.
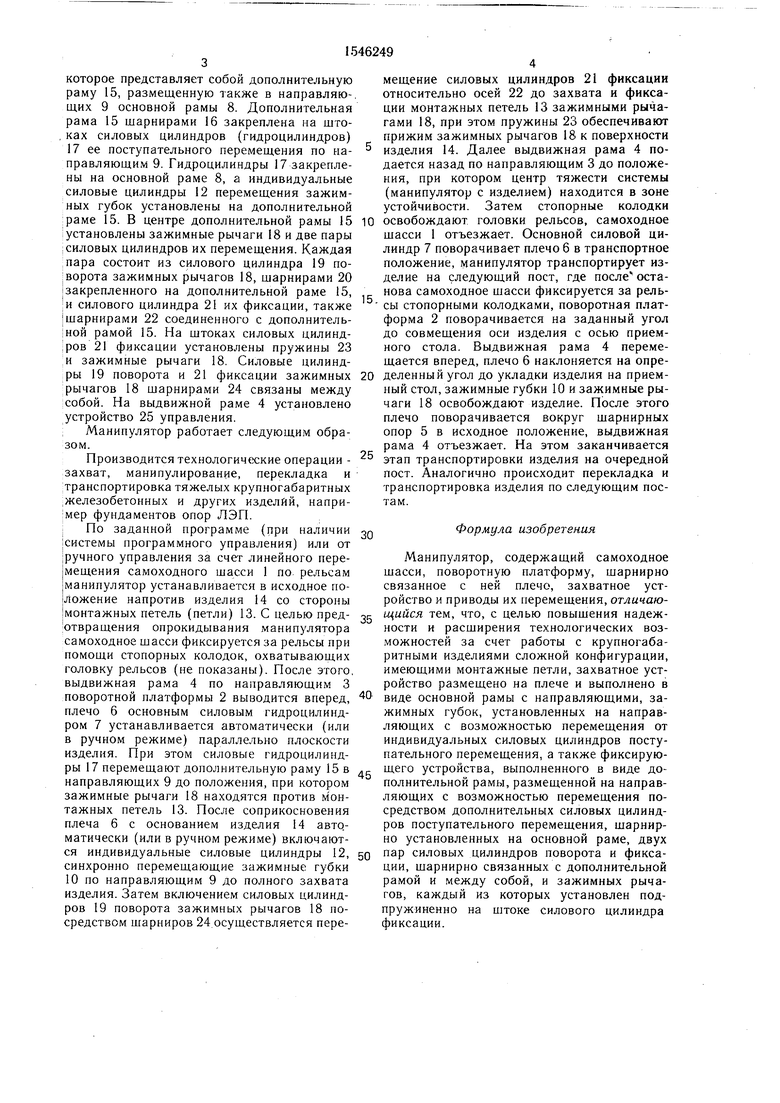
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 2; на фиг. 4 - вид В на фиг. 2.
Манипулятор содержит расположенное на рельсах (не показаны) самоходное шасси 1, на котором установлена поворотная платформа 2 с направляющими 3, в которых
размещена выдвижная рама 4. Выдвижная рама 4 с помощью шарнирных опор 5 соединена с плечом 6, связанным со штоком основного телескопического гидроцилиндра 7, закрепленного на выдвижной раме 4 и управляющего поворотом плеча 6 относительно шарнирных опор 5. На плече 6 установлено захватное устройство, выполненное в виде прямоугольной жесткой основной рамы 8 с направляющими 9, закрепленными на продольных балках основной рамы 8. В направляющих 9 попарно вверху и внизу основной рамы 8 установлены зажимные губки 10, с помощью шарниров 11 соединенные со штоками индивидуальных силовых цилиндров поступательного перемещения 12. Захватное устройство снабжено фиксирующим устройством для фиксации монтажной петли (петель) 13 изделия 14,
СП
ь
Ь S
Јъ СО
которое представляет собой дополнительную раму 15, размещенную также в направляющих 9 основной рамы 8. Дополнительная рама 15 шарнирами 16 закреплена на штоках силовых цилиндров (гидроцилиндров) 17 ее поступательного перемещения по направляющим 9. Гидроцилиндры 17 закреплены на основной раме 8, а индивидуальные силовые цилиндры 12 перемещения зажимных губок установлены на дополнительной
мещение силовых цилиндров 21 фиксации относительно осей 22 до захвата и фиксации монтажных петель 13 зажимными рычагами 18, при этом пружины 23 обеспечивают прижим зажимных рычагов 18 к поверхности изделия 14. Далее выдвижная рама 4 подается назад по направляющим 3 до положения, при котором центр тяжести системы (манипулятор с изделием) находится в зоне устойчивости. Затем стопорные колодки
раме 15. В центре дополнительной рамы 15 10 освобождают головки рельсов, самоходное установлены зажимные рычаги 18 и две пары п
силовых цилиндров их перемещения. Каждая пара состоит из силового цилиндра 19 поворота зажимных рычагов 18, шарнирами 20 закрепленного на дополнительной раме 15, и силового цилиндра 21 их фиксации, также шарнирами 22 соединенного с дополнительной рамой 15. На штоках силовых цилиндров 21 фиксации установлены пружины 23 и зажимные рычаги 18. Силовые цилиндшасси 1 отъезжает. Основной силовой цилиндр 7 поворачивает плечо 6 в транспортное положение, манипулятор транспортирует изделие на следующий пост, где после останова самоходное шасси фиксируется за рельсы стопорными колодками, поворотная платформа 2 поворачивается на заданный угол до совмещения оси изделия с осью приемного стола. Выдвижная рама 4 перемещается вперед, плечо 6 наклоняется на опреры 19 поворота и 21 фиксации зажимных 20 деленный угол до укладки изделия на прием- рычагов 18 шарнирами 24 связаны между ный стол, зажимные губки 10 и зажимные ры- собой. На выдвижной раме 4 установлено устройство 25 управления.
30
Манипулятор работает следующим образом.
Производится технологические операции - захват, манипулирование, перекладка и транспортировка тяжелых крупногабаритных железобетонных и других изделий, например фундаментов опор ЛЭП.
По заданной программе (при наличии системы программного управления) или от ручного управления за счег линейного пере- ещения самоходного шасси 1 по рельсам (манипулятор устанавливается в исходное положение напротив изделия 14 со стороны монтажных петель (петли) 13. С целью пред- 35 отвращения опрокидывания манипулятора самоходное шасси фиксируется за рельсы при помощи стопорных колодок, охватывающих головку рельсов (не показаны). После этого, выдвижная рама 4 по направляющим 3 поворотной платформы 2 выводится вперед, 40 плечо 6 основным силовым гидроцилиндром 7 устанавливается автоматически (или в ручном режиме) параллельно плоскости изделия. При этом силовые гидроцилиндры 17 перемещают дополнительную раму 15 в .,- направляющих 9 до положения, при котором зажимные рычаги 18 находятся против монтажных петель 13. После соприкосновения плеча 6 с основанием изделия 14 автоматически (или в ручном режиме) включаются индивидуальные силовые цилиндры 12, синхронно перемещающие зажимные губки 10 по направляющим 9 до полного захвата изделия. Затем включением силовых цилиндров 19 поворота зажимных рычагов 18 посредством шарниров 24 осуществляется пере50
чаги 18 освобождают изделие. После этого плечо поворачивается вокруг шарнирных опор 5 в исходное положение, выдвижная рама 4 отъезжает. На этом заканчивается этап транспортировки изделия на очередной пост. Аналогично происходит перекладка и транспортировка изделия по следующим постам.
Формула изобретения
Манипулятор, содержащий самоходное шасси, поворотную платформу, шарнирно связанное с ней плечо, захватное устройство и приводы их перемещения, отличающийся тем, что, с целью повышения надежности и расширения технологических возможностей за счет работы с крупногабаритными изделиями сложной конфигурации, имеющими монтажные петли, захватное устройство размещено на плече и выполнено в виде основной рамы с направляющими, зажимных губок, установленных на направляющих с возможностью перемещения от индивидуальных силовых цилиндров поступательного перемещения, а также фиксирующего устройства, выполненного в виде дополнительной рамы, размещенной на направляющих с возможностью перемещения посредством дополнительных силовых цилиндров поступательного перемещения, шарнирно установленных на основной раме, двух пар силовых цилиндров поворота и фиксации, шарнирно связанных с дополнительной рамой и между собой, и зажимных рычагов, каждый из которых установлен под- пружиненно на штоке силового цилиндра фиксации.
мещение силовых цилиндров 21 фиксации относительно осей 22 до захвата и фиксации монтажных петель 13 зажимными рычагами 18, при этом пружины 23 обеспечивают прижим зажимных рычагов 18 к поверхности изделия 14. Далее выдвижная рама 4 подается назад по направляющим 3 до положения, при котором центр тяжести системы (манипулятор с изделием) находится в зоне устойчивости. Затем стопорные колодки
освобождают головки рельсов, самоходное
шасси 1 отъезжает. Основной силовой цилиндр 7 поворачивает плечо 6 в транспортное положение, манипулятор транспортирует изделие на следующий пост, где после останова самоходное шасси фиксируется за рельсы стопорными колодками, поворотная платформа 2 поворачивается на заданный угол до совмещения оси изделия с осью приемного стола. Выдвижная рама 4 перемещается вперед, плечо 6 наклоняется на опре0 деленный угол до укладки изделия на прием- ный стол, зажимные губки 10 и зажимные ры-
0
5 0 ,-
0
чаги 18 освобождают изделие. После этого плечо поворачивается вокруг шарнирных опор 5 в исходное положение, выдвижная рама 4 отъезжает. На этом заканчивается этап транспортировки изделия на очередной пост. Аналогично происходит перекладка и транспортировка изделия по следующим постам.
Формула изобретения
Манипулятор, содержащий самоходное шасси, поворотную платформу, шарнирно связанное с ней плечо, захватное устройство и приводы их перемещения, отличающийся тем, что, с целью повышения надежности и расширения технологических возможностей за счет работы с крупногабаритными изделиями сложной конфигурации, имеющими монтажные петли, захватное устройство размещено на плече и выполнено в виде основной рамы с направляющими, зажимных губок, установленных на направляющих с возможностью перемещения от индивидуальных силовых цилиндров поступательного перемещения, а также фиксирующего устройства, выполненного в виде дополнительной рамы, размещенной на направляющих с возможностью перемещения посредством дополнительных силовых цилиндров поступательного перемещения, шарнирно установленных на основной раме, двух пар силовых цилиндров поворота и фиксации, шарнирно связанных с дополнительной рамой и между собой, и зажимных рычагов, каждый из которых установлен под- пружиненно на штоке силового цилиндра фиксации.
-/L i..t-
ГТ
JL/ -SJ JJ J
%2.2
да
%2.3
. n
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1333567A1 |
| Машина самоходная гусеничная малогабаритная для подъема и установки бордюрного камня. | 2022 |
|
RU2785102C1 |
| Захват | 1983 |
|
SU1117206A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1991 |
|
RU2021159C1 |
| Лесозаготовительная машина | 1980 |
|
SU897170A2 |
| МНОГОЦЕЛЕВОЙ МАНИПУЛЯТОРНЫЙ АГРЕГАТ | 1992 |
|
RU2016756C1 |
| Адаптивный захват | 1988 |
|
SU1542796A1 |
| Лесозаготовительная машина | 1984 |
|
SU1291075A1 |
| Манипулятор | 1986 |
|
SU1315228A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1970 |
|
SU258758A1 |

Изобретение относится к роботостроению и может быть использовано для механизации и автоматизации погрузочно-разгрузочных работ, выполнения различных технологических транспортных операций, в том числе и строительных. Целью изобретения является повышение надежности и расширение технологических возможностей за счет работы с крупногабаритными изделиями сложной конфигурации, имеющими монтажные петли. Для этого на основной раме установлены зажимные губки, соединенные со штоками индивидуальных силовых цилиндров поступательного перемещения. Захватное устройство снабжено фиксирующим устройством для фиксации монтажной петли (петель) 13 изделия. Фиксирующее устройство выполнено в виде дополнительной рамы 15, размещенной в направляющих основной рамы. В центре дополнительной рамы установлены зажимные рычаги 18 и две пары силовых цилиндров их перемещения. Каждая пара состоит из силового цилиндра 19 поворота зажимных рычагов и силового цилиндра 21 их фиксации. На штоках силовых цилиндров 21 фиксации установлены пружины 23 и зажимные рычаги 18. Силовые цилиндры 19 поворота и 21 фиксации зажимных рычагов 18 шарнирами 24 связаны между собой. 4 ил.
S 18 2} 2/ J
19 « Фш.Ґ
19
| Манипулятор | 1984 |
|
SU1333567A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
