Изобретение относится к устройствам для транспортировки, а именно к конвейерам с циклически движущимися грузоносителями, и может быть использовано для передачи изделий в машиностроительных и приборостроительных Производствах, например в гибких автоматизированных системах этих производств для передачи изделий с одной автоматической линии на другую.
Цель изобретения - повышение производительности .
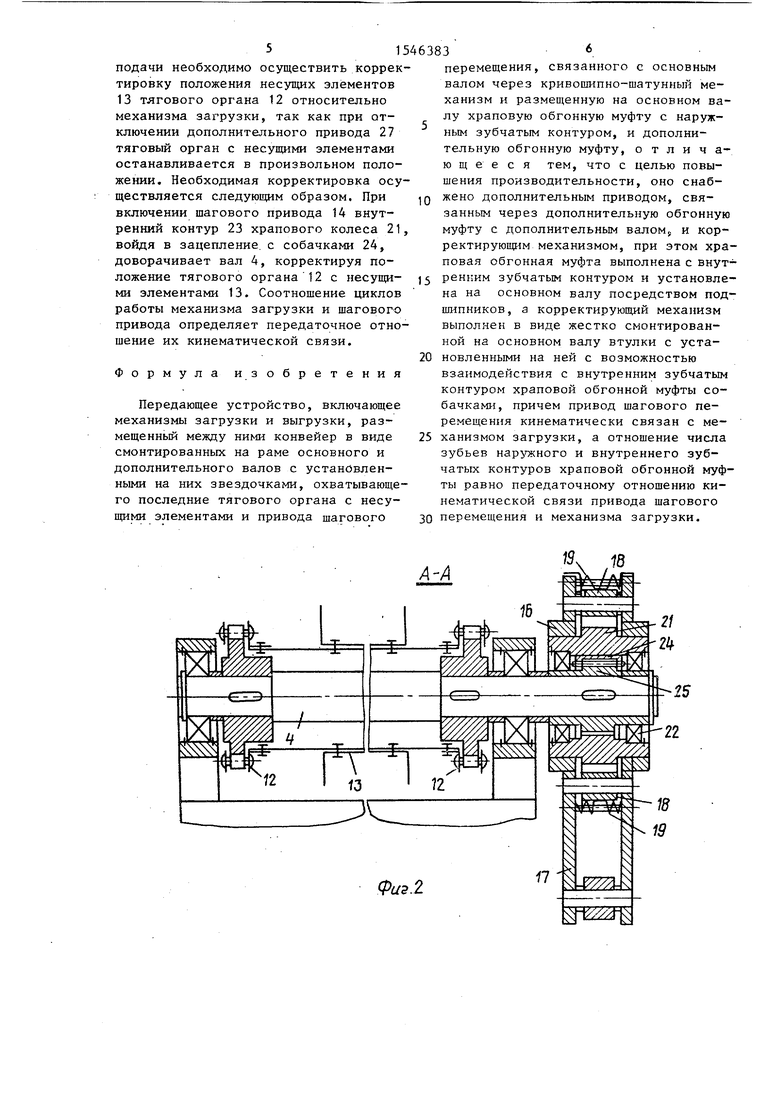
,На фиг.1 представлено передающее устройство, общий вид; на фиг.2 - „ разрез А-А на фиг.1.
Передающее устройство содержит механизм 1 загрузки, выполненньш, например, в виде желоба с отсекате- лем, механизм 2 выгрузки, который также может быть выполнен в виде желоба с отсекателем, а также размещенный между ними конвейер. Конвейер включает в себя неподвижную раму 3, размещенные в ней основной вал 4, дополнительный вал 5, натяжной вал 6 и отклоняющий вал 7, смонтированные на валах звездочки 8-11 и охватывающий их тяговый орган 12 с несущими элементами 13. Основной 1 вал 4 связан с приводом 14 шагового перемещения кривошипно-шатуяным механизмом 15. На валу 4 размещена храповая обгонная муфта. Храповая обгонная муфта содержит корпус 16 с рычагом 17, на котором размещены iдве собачки 18, подпружиненные пружинами 19. Собачки 18 находятся в зацеплении с наружным зубчатые контуром 20 храпового колеса 21, сидящего на валу 4 на подшипниках 22„ Храповое колесо 21 храповой обгонкой муфты выполнено с внутренним зубчатым контуром 23. Внутренний контур 23 храпового колеса 21 находится в зацеплении с корректирующим механизмом, выполненным в виде двух собачек 24 на втулке 25, жестко сидящей на валу 4. На неподвижной раме 3 контейнера размещен упор 26. Дополнительный вал 5 связан с дополнительны приводом 27 через дополнительную обгонную муфту 28. Привод шагового перемещения кинематически через шестерню 29 и 30 связан с приводом механизма загрузки. Передаточное отношение шестерен 29 и 30 равно отношению количества зубьев наружного контура 20 храпового колеса 21 к количеству
5
0
5
0
5
0
5
0
5
зубьев внутреннего контура 23 храпового колеса 21. Кроме того, количество зубьев внутреннего контура 23 храпового колеса 21 должно быть равно количеству несущих элементов 13 тягового о ргана 12, располагающихся на звездочке приводного вала при огибании его тяговым органом.
Передающее устройство работает следующим образом.
В первом режиме осуществляется шаговая подача изделий 31 от механизма 1 загрузки к механизму 2 выгрузки. При этом при включении шагового привода его вал поворачивается на 180, шатун кривошипно-шатунного механизма 15 отводит рычаг 17 вправо. При отведении рычага 17 вместе с ним отводятся собачки 18 до зацепления со следующим зубом наружного зубчатого контура 20 храпового колеса 21. При .дальнейшем повороте вала привода до 360 шатун кривошипно-шатунного механизма 15 тянет назад рычаг 17 корпуса 16, через собачки 18 поворачивает храповое колесо 21 на один шаг. При повороте храпового колеса 21 его внутренний контур 23 через собачки 24 поворачивает вал 4 на соответствующий угол, приводя в движение тяговый орган 12 с несущими элементами 13. Повернувшись на один шаг, храповое колесо 21 фиксируется упором 26, Таким образом, каждый поворот привода 14 вызывает перемещение тягового органа 12 с несущими элементами 13 на один шаг. Кинематическая связь шагового привода 14 и привода механизма чагрузки обеспечивает соответствие работы механизма загрузки и конвейера.
Вторым режимом работы является режим скоростного транспортирования. Датчиком на механизме выгрузки (не показан) включается дополнительный привод 27, приводящий в действие через дополнительную обгонную муфту 28 дополнительный вал 5 и охватывающий его тяговой орган 12 с несущими элементами 13. Осуществляется скоростная подача партии изделий к механизму выгрузки. Затем от воздействия изделия на датчик отключается привод 27 и снова включается привод 14 шагового перемещения, происходит выгрузка изделий на механизм 2 выгрузки.
При переходе с режима скоростного транспортирования на режим шаговой
А-А
Яч 18
Фиг 2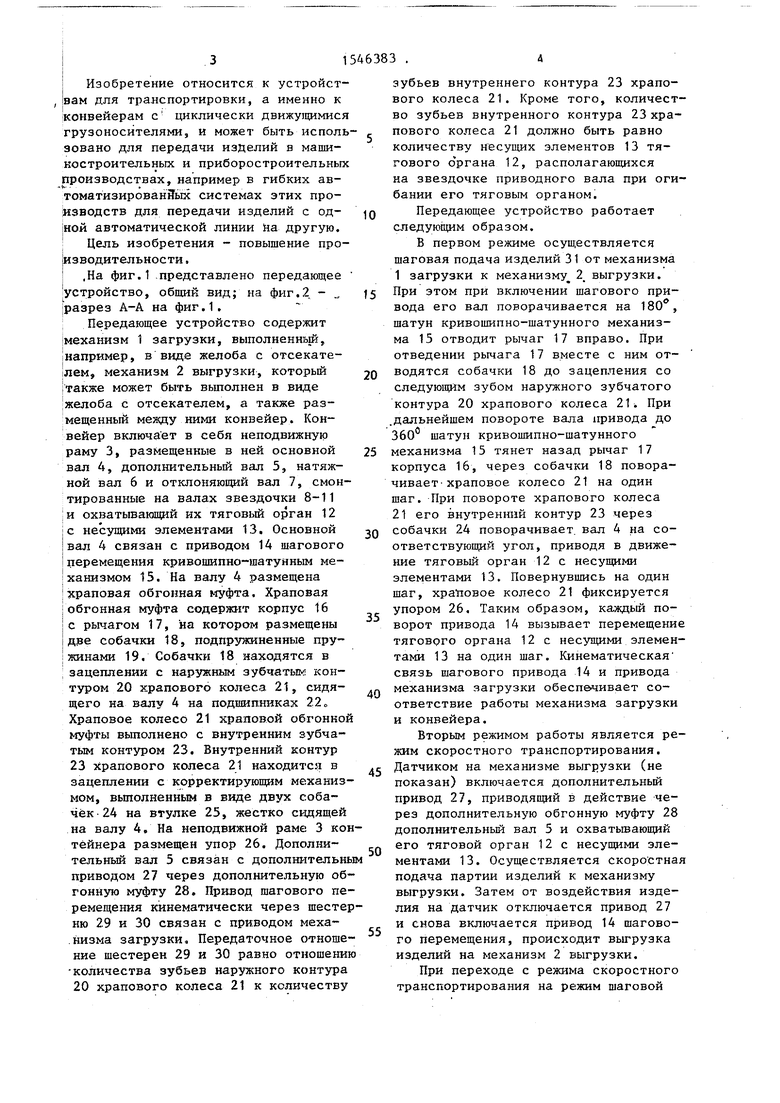
| название | год | авторы | номер документа |
|---|---|---|---|
| Пульсирующий конвейер с регулируемым шагом | 1981 |
|
SU988691A1 |
| Пульсирующий конвейер с регулируемым шагом | 1984 |
|
SU1284906A1 |
| Устройство для маркировки плоских изделий | 1982 |
|
SU1134385A1 |
| Шаговый конвейер | 1990 |
|
SU1720955A1 |
| РАЗДАТЧИК-СМЕСИТЕЛЬ КОРМОВ | 1991 |
|
RU2040165C1 |
| ЛЕСОПИЛЬНАЯ РАМА | 1993 |
|
RU2084331C1 |
| ЗАГРУЗОЧНОЕ УСТРОЙСТВО | 1973 |
|
SU381497A1 |
| Исполнительный орган камнераспиловочного станка | 1978 |
|
SU676462A1 |
| Раздатчик-смеситель кормов | 1990 |
|
SU1711747A1 |
| Устройство для маркировки плоских изделий | 1985 |
|
SU1273261A1 |
Изобретение относится к устройствам транспортировки и передачи изделий и позволяет повысить производительность. Устройство содержит механизмы загрузки 1 и выгрузки 2 и размещенный между ними конвейер. Последний включает закрепленные на раме 3 основной вал 4, дополнительный вал 5, натяжной вал 6 и отклоняющий вал 7, смонтированные на них звездочки 8-11 и охватывающий последние тяговый орган (ТО) 12 с несущими элементами 13. С валом 4 связан привод (П) 14 шагового перемещения, а с валом 5 - дополнительный П 27. При этом П 14 связан с валом 4 через кривошипно-шатунный механизм 15, храповую обгонную муфту в виде колеса 21, выполненного с наружным и внутренним зубчатыми контурами (К) 20,23, и корректирующий механизм. Последний выполнен в виде жестко закрепленной на валу 4 втулки 25 с собачками 24, взаимодействующими с К 23. Дополнительный П 27 связан с валом 5 через дополнительную обгонную муфту 28. Отношение числа зубьев К 20 и 23 равно передаточному отношению кинематической связи П 14 и механизма 1 загрузки. Изделия подаются механизмом загрузки 1 в несущие элементы 13, которые перемещаются П 14 на шаг, при этом П 27 отключен. Для ускоренного перемещения деталей работает П 27 при отключенном П 14. 2 ил.
| Устройство для передачи длинномерных изделий с одной технологической позиции на другую | 1976 |
|
SU590214A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Пульсирующий конвейер с регулируемым шагом | 1984 |
|
SU1284906A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
