Фиг.З
Изобретение относится к подъемно- транспортной технике, в частности к захватным устройствам.
Цель изобретения - расширение эксплуатационных возможностей путем обеспечения захвата груза разного типоразмера.
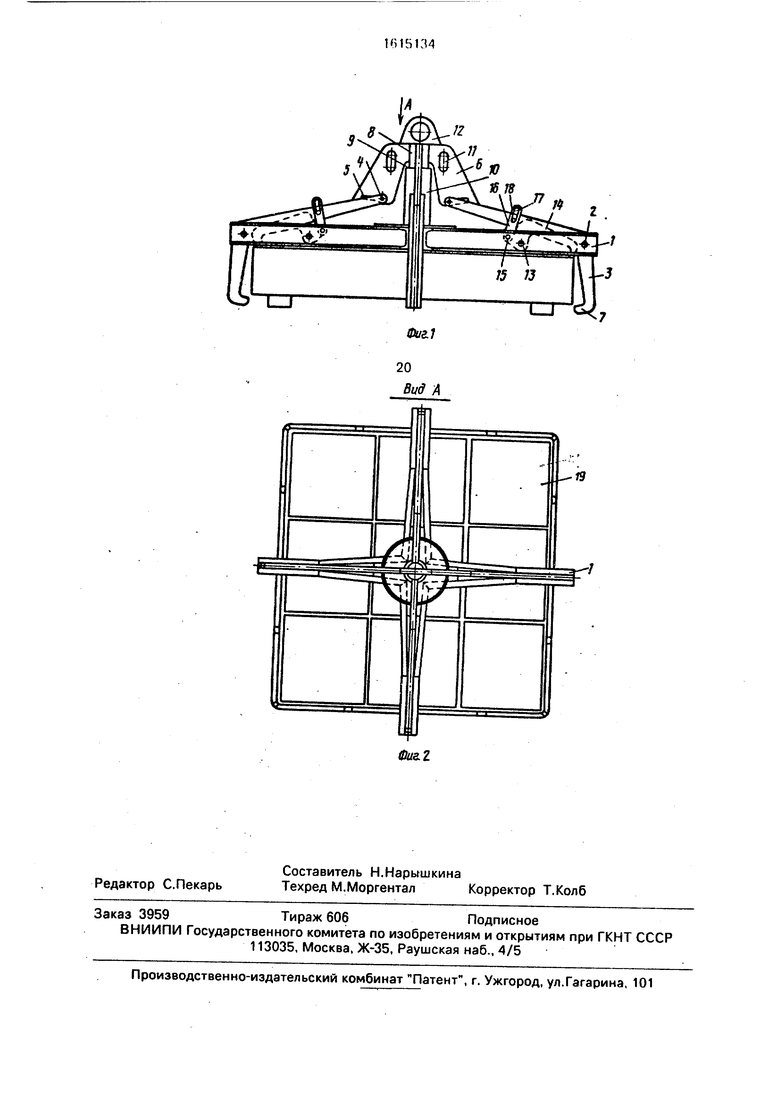
На фиг. 1 изображено захватное устройство, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - захватное устройство с грузом небольшого типоразмера.
Захватное устройство содержит раму 1, на которой посредством шарниров 2 закреплены основные двуплечие рычаги 3, верхние плечи которых соединены с осями 4, подвижными в поперечных прорезях 5 траверсы б, а на нижних плечах выполнены захватные выступы 7. Траверса 6 закреплена на ползуне 8 механизма 9 фиксации положений рамы 1 и траверсы 6, который размещен в направляющей 10, жестко прикрепленной к раме 1. Для зацепления устройства грузовым стропом служат строповочные отверстия 11 в траверсе б, а для зацепления его непосредственно крюком подъемной машины служит проушина 12, прикрепленная к ползуну 8.
Между двуплечими рычагами 3 на раме 1 посредством шарниров 13 закреплены дополнительные двуплечие рычаги 14, которые, в свою очередь, посредством горизонтальныхосей 15 соединены с тягами 16 с продольными пазами 17, в которых установлены пальцы 18, соединяющие тяги 1 б с верхними плечами основных двуплечих рычагов 3.
Для захвата грузов большого или малого типоразмеров проушину 12 устройства соединяют с крюком подъемной машины или крюки грузового стропа зацепляют за строповочные отверстия 11 в траверсе 6. При этом механизм 9 фиксации фиксирует основные двуплечие рычаги 3 в разведенном положении, а связанные с ними дополнительные двуплечие рычаги 14 повернуты в плоскость рамы 1 с опиранием пальцев 18 в нижние концы продольных пазов 17тяг 16.
Устройство наводят на груз 19 и опускают до опирания на него рамы 1, в результате чего механизм 9 фиксации расфиксирует раму 1 и траверсу 6, основные двуплечие рычаги 3 и связанные с ними дополнительные двуплечие рычаги 14. Затем устройство поднимают, в результате чего в начальный момент ползун 8 перемещается в направляющей 10 и поворачивает основные
двуплечие рычаги 3, при этом груз большого типоразмера захватывают основные двуплечие рычаги 3, при повороте которых пальцы 18 перемещаются вверх и тем самым перестают удерживать дополнительные двуплечие рычаги 14 через тяги 16 от поворота вниз под собственным весом. Однако поворот дополнительных двуплечих рычагов 14 не происходит, так как они опираются на груз, поэтому пальцы 18 свободно перемещаются в пазах 17 тяг 16.
При захвате груза малого типоразмера поворот основных двуплечих рычагов 3 освобождает дополнительные двуплечие рычаги 14 от удерживания, которые поворачиваются вниз под собственным весом и захватывают этот груз. При дальнейшем повороте рычагов пальцы 18 перемещают в пазах 17 до опирания в их
верхние концы, после чего тяги 16 осуществляют дополнительный поворот дополнительных двуплечих рычагов 14 до зажатия ими груза и последующего его подъема. После перемещения устройства с грузом к месту разгрузки его опускают до установки груза на площадку и опускания ползуна 8, который разводит основные двуплечие рычаги 3 и связанными с ними рычаги 14 и переключает механизм 9 фиксации.
Затем устройство с разведенными и зафиксированными основными двуплечими рычагами 3 и дополнительными двуплечими рычагами 14 вновь перемещают на исходную позицию для захвата других грузов.
Формула изобретения Захватное устройство, содержащее раму, связанные между собой и шарнирно с рамой основные и дополнительные двуплечие рычаги, связанную с подъемным механизмом траверсу, с которой кинематически связаны верхние плечи основных двуплечих рычагов, закрепленные на горизонтальных осях нижними концами тяги с траверсой и
рамой, механизм фиксации их взаимного положения, отличающееся тем, что, с целью расширения эксплуатационных возможностей путем обеспечения захвата груза разного типоразмера, тяги выполнены с
продольными пазами в верхних концах, а их горизонтальные оси закреплены на вер хних плечах дополнительных двуплечих рычагов, при этом устройство снабжено пальцами, жестко закрепленными в центральных частях верхних плеч основных двуплечих захватных рычагов и расположенных в продольных пазах тяг.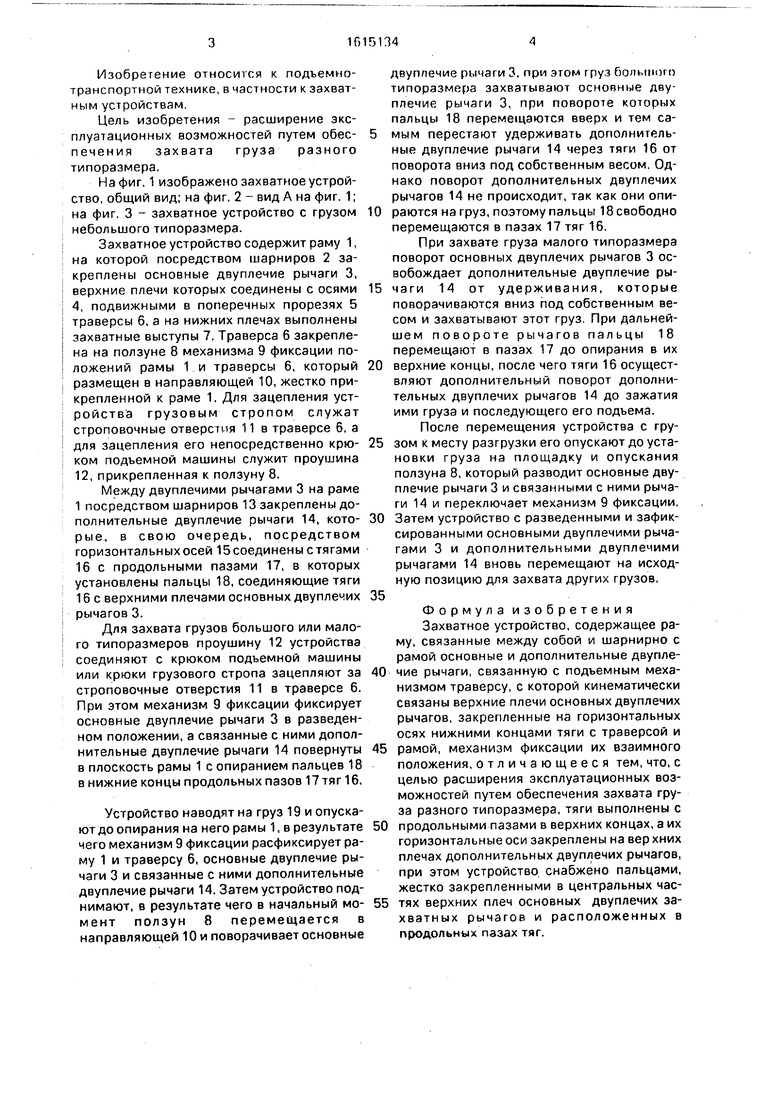
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Грузозахватное устройство | 1990 |
|
SU1770252A1 |
| Грузозахватное устройство | 1989 |
|
SU1687554A1 |
| Грузозахватное устройство | 1991 |
|
SU1789490A1 |
| Захватное устройство для штучных грузов | 1981 |
|
SU1065325A1 |
| Грузозахватная система | 1989 |
|
SU1768491A1 |
| Захватное устройство | 1988 |
|
SU1581677A1 |
| Грузозахватное устройство | 1986 |
|
SU1426925A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Захват-раскладчик для штучных грузов | 1977 |
|
SU789369A1 |
Изобретение относится к подъемно-транспортному оборудованию. Цель изобретения - расширение эксплуатационных возможностей путем обеспечения захвата груза разного типоразмера. Захватное устройство содержит раму 1, траверсу 6, основные двуплечие рычаги 3 и дополнительные двуплечие рычаги 14, соединенные посредством тяг 16 и пальцев 18 с верхними плечами основных двуплечих рычагов 3. При захвате груза малого типоразмера поворот основных двуплечих рычагов 3 освобождает дополнительные двуплечие рычаги 14 для захвата груза. 3 ил.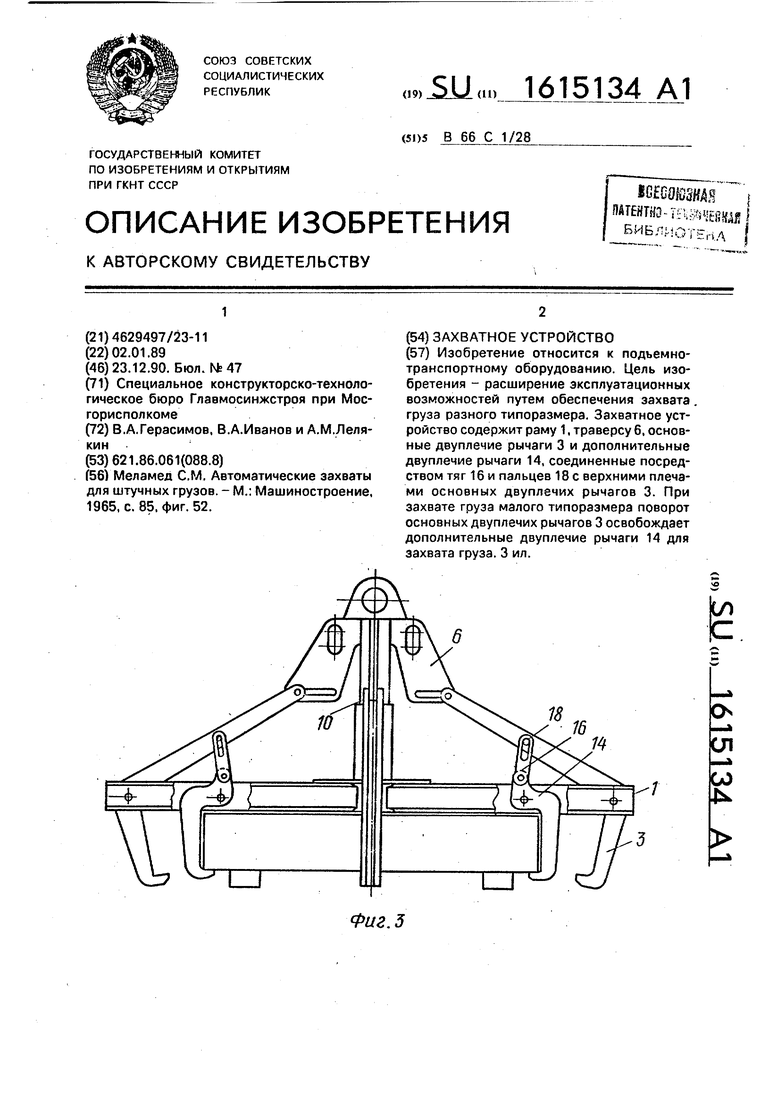
19
| Меламед С.М | |||
| Автоматические захваты для штучных грузов | |||
| - М.: Машиностроение, 1965, с | |||
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |
