Изобретение относится к подъемно- транспортному оборудованию, в частности к устройствам для захвата и транспортировки штучных или пакетных грузов симметричной или асимметричной формы.
Известен клещевой захват, содержащий двуплечие клещевины, шарнирно установленные на нижней траверсе. Верхние плечи клещевин шарнирно соединены с тягами, а нижние плечи - с поворотными губками. Губки имеют форму куба. Одна пара противолежащих рабочих граней куба имеет поперечный центральный вырез и накло- ненные к центру выполненные с поперечной насечкой соприкасающиеся с грузом поверхности. Другая пара противолежащих рабочих граней куба имеет продольный центральный вырез и
соприкасающиеся с грузом поверхности, которые выполнены с продольной насечкой.
Известен также автоматический захват, содержащий раму с направляющими для подвижных кареток, несущих захватные органы. Подвижные каретки шарнирно соединены с нижними концами рычагов, верхние концы которых посредством кронштейнов связаны с двуплечими рычагами. Другие концы двуплечих рычагов шарнирно соединены с тягами. Тяги связаны с механизмом фиксации.
Известный захват позволяет увеличить рабочий ход кареток, а, следовательно, расширить диапазон захватываемых грузов.
Однако данный захват не обеспечивает захват грузов асимметричной формы, что является недостатком устройства.
I
ivO
Цель изобретения - расширение эксплуатационных возможностей устройства путем обеспечения захвата грузов асимметричной формы.
Указанная цель достигается тем, что в устройстве, содержащем опорную раму, шарнирно связанные с нею двуплечие угловые рычаги, приводные тяги, шарнирно соединенные с одними плечами двуплечих угловых рычагов, кронштейны, связанные со вторыми плечами двуплечих угловых рычагов, одноплечие рычаги, связанные шарнирно одними плечами с кронштейнами, установочные элементы, шарнирно присоединенные к другим плечам одноплечих рычагов, и захватные органы, согласно изобретения, одноплечие рычаги представляют собой талрепы. При этом устройство снабжено дополнительными рычагами, присоединенными к кронштейнам и раме параллельно вторым плечам двуплечих рычагов. Устройство снабжено также направляющими стержнями, жестко прикрепленными своими концами к установочным элементам и шарнирно связанными с кронштейнами. При этом захватные органы установлены на направляющих стержнях с возможностью перемещения в горизонтальном и вертикальном направлениях
Снабжение устройства дополнительными рычагами, соединенными с опорной рамой и кронштейнами, позволяет создать в системе рычагов два шарнирных параллелограмма. Это необходимо для стабилизации положений каждого из кронштейнов, несущих на себе элементы настройки на захват грузов и сами захватные органы.
Снабжение устройства направляющими стержнями и выполнение одноплечих рычагов в виде талрепов позволяет объединить элементы настройки в треугольник с одной регулируемой стороной Изменение длины одноплечих рычагов с помощью талрепов позволяет изменить положение укрепленных на стержнях захватных органов независимо друг от друга, настраивая на определенную форму захватываемых ас- симметричных грузов
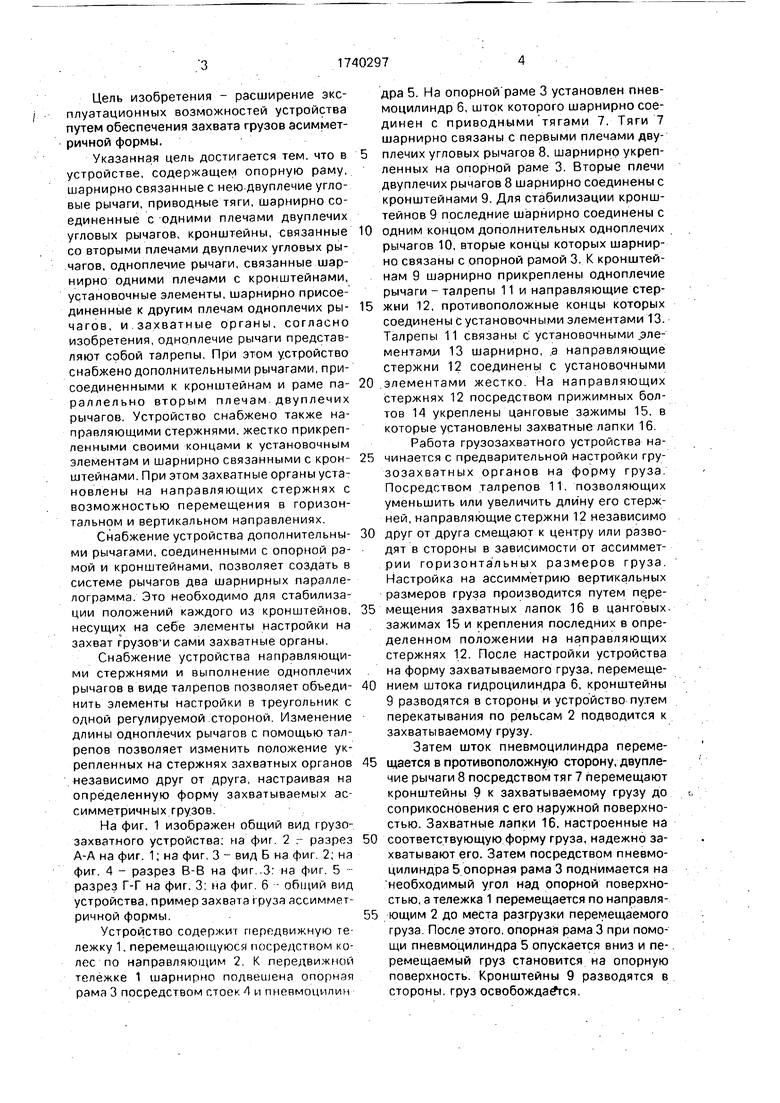
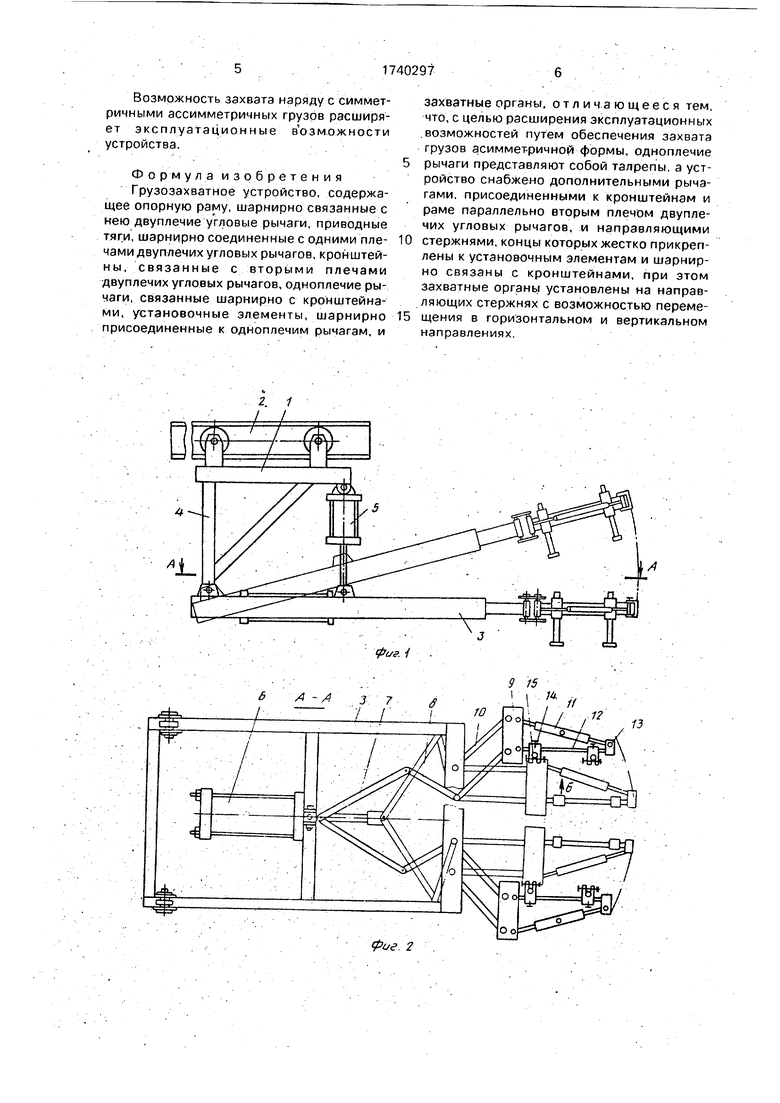
На фиг. 1 изображен общий вид грузозахватного устройства, на фиг 2 - разрез А-А на фиг. 1; на фиг 3 - вид Б на фиг 2, на фиг. 4 - разрез В-В на фиг 3- на фиг 5 разрез Г-Г на фиг. 3 на фиг б общий вид устройства, пример захвата i руза ассиммет- ричной формы.
Устройство содержит передвижную те лежку 1. перемещающуюся посредством колес по направляющим 2 К передвижной тележке 1 шарнирно подвешена опорная рама 3 посредством стоек А и пневмоцилин
дра 5. На опорной раме 3 установлен пнев- моцилиндр б, шток которого шарнирно соединен с приводными тягами 7. Тяги 7 шарнирно связаны с первыми плечами двуплечих угловых рычагов 8, шарнирно укрепленных на опорной раме 3. Вторые плечи двуплечих рычагов 8 шарнирно соединены с кронштейнами 9. Для стабилизации кронштейнов 9 последние шарнирно соединены с
0 одним концом дополнительных одноплечих рычагов 10, вторые концы которых шарнирно связаны с опорной рамой 3. К кронштейнам 9 шарнирно прикреплены одноплечие рычаги - талрепы 11 и направляющие стер5 жни 12, противоположные концы которых соединены с установочными элементами 13. Талрепы 11 связаны с установочными .элементами 13 шарнирно, а направляющие стержни 12 соединены с установочными
0 элементами жестко На направляющих стержнях 12 посредством прижимных болтов 14 укреплены цанговые зажимы 15, в которые установлены захватные лапки 16 Работа грузозахватного устройства на5 чинается с предварительной настройки грузозахватных органов на форму груза Посредством талрепов 11. позволяющих уменьшить или увеличить длину его стержней, направляющие стержни 12 независимо
0 друг от друга смещают к центру или разводят в стороны в зависимости от ассиммет- рии горизонтальных размеров груза Настройка на ассимметрию вертикальных размеров груза производится путем пе.ре5 мещения захватных лапок 16 в цанговых зажимах 15 и крепления последних в определенном положении на направляющих стержнях 12. После настройки устройства на форму захватываемого груза, перемеще0 нием штока гидроцилиндра 6, кронштейны 9 разводятся в стороны и устройство путем перекатывания по рельсам 2 подводится к захватываемому грузу.
Затем шток пневмоцилиндра переме5 щается в противоположную сторону, двуплечие рычаги 8 посредством тяг 7 перемещают кронштейны 9 к захватываемому грузу до соприкосновения с его наружной поверхностью. Захватные лапки 16, настроенные на
0 соответствующую форму груза, надежно захватывают его. Затем посредством пневмоцилиндра 5 опорная рама 3 поднимается на необходимый угол над опорной поверхностью, а тележка 1 перемещается по направля5 ющим 2 до места разгрузки перемещаемого груза После этого, опорная рама 3 при помощи пневмоцилиндра 5 опускается вниз и перемещаемый груз становится на опорную поверхность. Кронштейны 9 разводятся в стороны, груз освобождаемся.
Возможность захвата наряду с симметричными ассимметричных грузов расширяет эксплуатационные возможности устройства.
Формула изобретения Грузозахватное устройство, содержащее опорную раму, шарнирно связанные с нею двуплечие угловые рычаги, приводные тяги, шарнирно соединенные с одними пле чами двуплечих угловых рычагов, кронштей- ны, связанные с вторыми плечами двуплечих угловых рычагов, одноплечие рычаги, связанные шарнирно с кронштейнами, установочные элементы, шарнирно присоединенные к одноплечим рычагам, и
-
10
15
захватные органы, отличающееся тем, что, с целью расширения эксплуатационных возможностей путем обеспечения захвата грузов асиммет-ричной формы, одноплечие рычаги представляют собой талрепы, а устройство снабжено дополнительными рычагами, присоединенными к кронштейнам и раме параллельно вторым плечом двуплечих угловых рычагов, и направляющими стержнями, концы которых жестко прикреплены к установочным элементам и шарнирно связаны с кронштейнами, при этом захватные органы установлены на направляющих стержнях с возможностью перемещения в горизонтальном и вертикальном направлениях.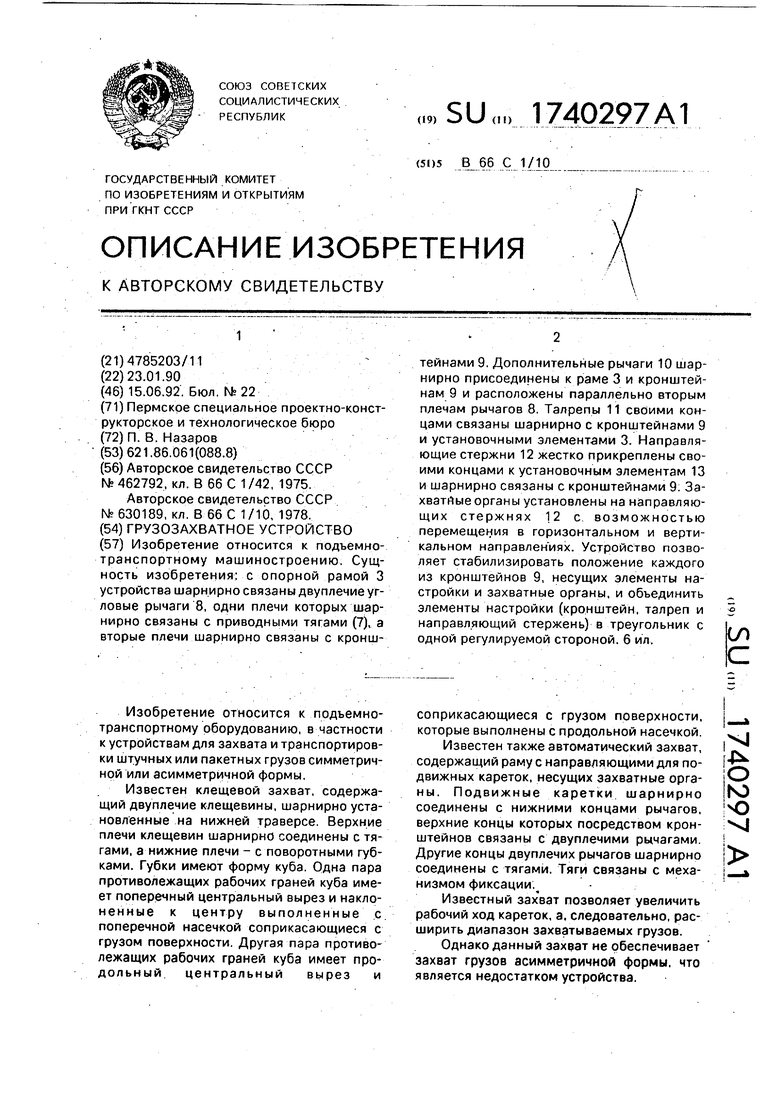
| название | год | авторы | номер документа |
|---|---|---|---|
| Ручная тележка для перевозки и кантования бочки | 1987 |
|
SU1449441A2 |
| Грузозахватное устройство | 1990 |
|
SU1776624A1 |
| Грузозахватная система | 1989 |
|
SU1768491A1 |
| Механизм управления захватным устройством для контейнеров | 1985 |
|
SU1421670A1 |
| Захватное устройство для груза с проушиной | 1989 |
|
SU1735194A1 |
| Грузозахватное устройство | 1991 |
|
SU1789490A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1998 |
|
RU2137347C1 |
| Грузозахватное устройство | 1990 |
|
SU1770252A1 |
| Захват для изделий с центральным отверстием | 1986 |
|
SU1409572A1 |
| Грузозахватное устройство | 1989 |
|
SU1776623A1 |
Изобретение относится к подъемно- транспортному машиностроению. Сущность изобретения: с опорной рамой 3 устройства шарнирно связаны двуплечие угловые рычаги 8, одни плечи которых шарнирно связаны с приводными тягами (7), а вторые плечи шарнирно связаны с кронштейнами 9. Дополнительные рычаги 10 шарнирно присоединены к раме 3 и кронштейнам 9 и расположены параллельно вторым плечам рычагов 8. Талрепы 11 своими концами связаны шарнирно с кронштейнами 9 и установочными элементами 3. Направляющие стержни 12 жестко прикреплены своими концами к установочным элементам 13 и шарнирно связаны с кронштейнами 9. Захватные органы установлены на направляющих стержнях 12 с возможностью перемещения в горизонтальном и вертикальном направлениях. Устройство позволяет стабилизировать положение каждого из кронштейнов 9, несущих элементы настройки и захватные органы, и объединить элементы настройки (кронштейн, талреп и направляющий стержень) в треугольник с одной регулируемой стороной. 6 ил. (Л
фиг 2
ML и 8 Г
Г Г
Фиг. 5
.SLJL
ъ/
15
,16
3
&Z
О иг. Ц
| Клещевой захват | 1973 |
|
SU462792A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Автоматический захват | 1977 |
|
SU630189A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
