Изобретение относится к подъемно- транспортной технике, в частности К грузозахватным устройствам. : Цель изобретения - расширение эксплуатационных возможностей за счет обеспечения захвата груза неправильной формы в стесненных условиях.
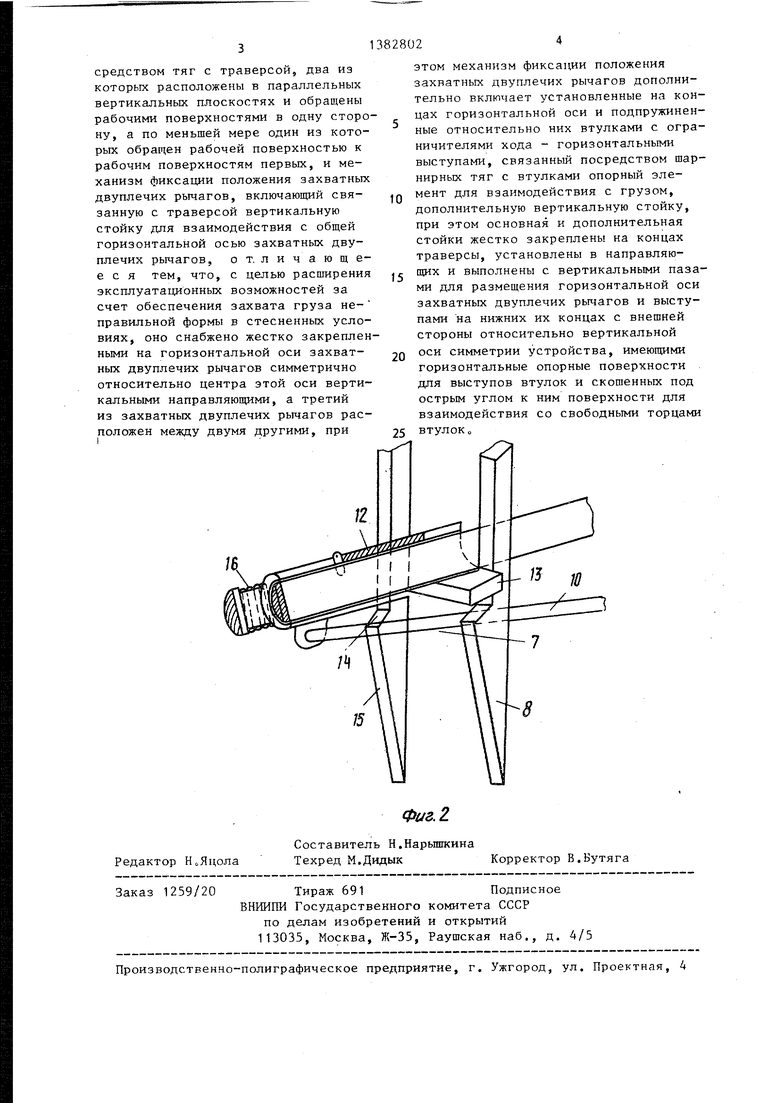
На фиг. 1 изображено грузозахват- нее устройство, общий вид на фиг. 2 - механизм фиксации положе-, ;ния двуплечих захватных рычагов.
Захватные двуплечие рычаги 1 соединены шарнирно на оси 2, нижние ;Концы которых своими рабочими поверхностями 3 направлены к центру, а верхние, выполненные равновесными с нижними, соединены гибкими тягами 4 с траверсой 5. На концах пос- , ладней жестко закреплены вертикальные стойки 6 с вертикальными пазами 7 и выступами 8 в нижней части, перемещающиеся в вертикальных напраляющих 9, которые жестко связаны с осью 2 о При этом концы оси 2 свободно перемещаются в пазах 7 стоек 6. Ось 2 фиксируется на стойках 6 посредством шарнирно соединенных тя 10, на шарнире которых имеется опор ный элемент 11, а на концах - шарнирно соединенные с тягами 10 втулки 12, ограниченно перемещающиеся на концах оси 2. Ограниченное перемещение втулок 12 необходимо, для того, чтобы они,- перемещаясь по оси 2, не выходили за пределы скошенных поверхностей стоек 6 Втулки 12 несут на себе горизонтальные выступы 13, взаимодействующие при фиксации j оси 2 с выступами 8 стоек 6, которы имеют горизскнтальные опорные поверхности 14 и скошенные поверхности
15,втулки 12 подпружинены пружинами 16.
Грузозахватное устройство работает следующим образом.
При опускании груза в кузов самосвала, где нет возможности раскрыться захватным двуплечим рычагам 1, траверса 5 со стойками 6 совершают поступательное движение вниз. При этом концы оси 2 попадают в пазы 7 стоек 6, Скошенные поверхности 15 стоек 6 при опускании действуют на втулки 12, которые, сжимая пружину
16,отходят в крайнее положение, пермещаясь по оси 2 до тех пор, пока
не кончатся скошенные поверхности 1
0 5 Q
0 5
стоек 6. Как только втулки 12 окажутся вьш1е выступов 13, они под действием пружины 16 и
5
0
5
веса шарнирных тяг 10 перемещаются к центру оси 2 и своими выступами 13 вступают во взаимодействие с горизонтальными опорными поверхностями 14. После чего можно производить подъем устройства. При этом захватные двуплечие рычаги 1 находятся в ослабленном, не рабочем состоянии, так как гибкие тяги 4 ослаблены, и рабочие поверхности 3, скользя по грузу, освобождаются от него.
Благодаря тому, что верхние концы захватных двуплечих рычагов 1, выполненные равновесными с нижними, в сумме с гибкими тягами 4 тяжелее нижних происходит самораскрывание захватных двуплечих рычагов 1.
При опускании устройства на следующий груз, производят ориентировочно наводку опорного элемента 10 на центр тяжести груза. При этом захватные двуплечие рычаги 1 раскрыты, а их рабочие поверхности 3 находятся на уровне опорного элемента 11 о При соприкосновении устройства с грузом в любом случае происходит упирание на опорньш элемент 11, который под действием силы тяжести устройства подается вверх„ При этом шарнирные тяги 10 действуют на втулки 12 и вновь отводят их в крайнее положение, сжимая пружины 16, а выступ 13 выходит из взаимодействия с горизонтальной опорной поверхностью 14. Далее траверса 5 с помощью подъемной машины поднимается вверхj а вместе с ней продвигаются вверх и освобожденные стойки 6, размещаясь в вертикальных нaпpaвляюш ix 9. В какой-то момент происходит натяжение гибких тяг 4, которые, действуя на захватные двуплечие рычаги 1, сжимают их. Происходит захват негабарита (груза)о При этом опорный элемент поднят над грузом и не касается его.
Формула изобретения
Грузозахватное устройство, содержащее присоединяемую подвеской к крюку грузоподъемной машины траверсу, связанные горизонтальной осью между собой, захватные двуплечие рычаги, верхние плечи которых соединены посредством тяг с траверсой, два из которых расположены в параллельных вертикальных плоскостях и обращены рабочими поверхностями в одну сторону, а по меньшей мере один из которых обрар ен рабочей поверхностью к рабочим поверхностям первых, и механизм фиксации положения захватных двуплечих рычагов, включающий связанную с траверсой вертикальную стойку для взаимодействия с общей горизонтальной осью захватных двуплечих рычагов, отличающееся тем, что, с целью расширения эксплуатационных возможностей за счет обеспечения захвата груза не- правильной формы в стесненных условиях, оно снабжено жестко закрепленными на горизонтальной оси захватных двуплечих рычагов симметрично относительно центра этой оси вертикальными направляющими, а третий из захватных двуплечих рычагов расположен между двумя другими, при
этом механизм фиксации положения захватных двуплечих рычагов дополнительно включает установленные на концах горизонтальной оси и подпружиненные относительно них втулками с ограничителями хода - горизонтальнь ми выступами, связанный посредством шарнирных тяг с втулками опорный элемент для взаимодействия с грузом, дополнительную вертикальную стойку, при этом основная и дополнительная стойки жестко закреплены на концах траверсы, установлены в направляю- цих и выполнены с вертикальными пазами для размещения горизонтальной оси захватных двуплечих рычагов и выступами на нижних их концах с внешней стороны относительно вертикальной оси симметрии устройства, имеющими горизонтальные опорные поверхности для выступов втулок и скошенных под острым углом к ним поверхности для взаимодействия со свободными торцами втулок о
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Захватное устройство для труб | 1980 |
|
SU952720A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Грузозахватное устройство | 1987 |
|
SU1493585A1 |
| Грузозахватное устройство | 1976 |
|
SU763233A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Грузозахватная система | 1985 |
|
SU1414753A1 |
| Грузозахватное устройство | 1989 |
|
SU1768492A2 |
| Грузозахватное устройство | 1978 |
|
SU906899A1 |
| Вакуумное грузозахватное устройство | 1982 |
|
SU1054268A2 |
Изобретение относится к подъемно-транспортной технике, в частности к грузозахватным устройствам. - Целью изобретения является расширение эксплуатационных возможностей за счет обеспечения захвата груза неправильной формы в стесненных условиях. При разгрузке траверса 5 с закрепленными на ней стойками 6 опускается вниз. При этом ось 2, на которой закреплены захватные двуплечие рычаги 1, размещается в пазу 7 стоек 6 и фиксируется с помощью ограниченно перемещающихся втулок 12 с выступами 13, взаимодействующими с выступами 8 стоек 6. При этом захватные двуплечие рычаги 1 ослаблены и при подъеме освобождаются от груза без их раскрытия. При опускании устройства на следующий груз стайки 6 автоматически освобождаются, а захватные двуплечие рычаги 1 захватывают груз. 2 ил. о (Л 1в
| Автоматический захват | 1981 |
|
SU1009963A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
