1
(21) 4314446/29-03
(22) 09И0.87
(46) 15.03.90. Вюл. Р Ю
(71)Сибирский автомобилъно-дорожный институт им. В.В.Куйбышева
(72)Б.С.Щербаков, С.А.Дерюхенко и Е.А.Зимин
(53) 621.878 (088.8) (56) Скловский А.А. Автоматизация дорожных машин. Рига: АВОТС, 1980, с. 197-199.
Авторское свидетельство СССР IP 1234498, кл. Е 01 С 19/48, 1984.
(54) УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЗЕМЛЕРОЙНО- ТРАНСПОРТНОЙ МАЛИНЫ ПО ЗАДАННОМУ КУРСУ
(57) Изобретение относится к автоматизации землеройно-транспортных машин. Цель - повышение точности управления положением рабочего органа (РО) 24 в горизонтальной плоскости. Для этого устройство снабжено верхним 23 и нижним 20 кронштейнами (К), соединенными друг с другом тягами 21 и 22. На РО 24 закреплен
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления рабочим органом в горизонтальной плоскости землеройной машины непрерывного действия | 1984 |
|
SU1234498A1 |
| Система управления рабочим органом в горизонтальной плоскости двухгусеничной землеройной машины | 1985 |
|
SU1265266A1 |
| Гидропривод рабочего органа землеройно-транспортной машины | 1988 |
|
SU1647094A2 |
| Система управления движением по курсу двухгусеничной машины | 1986 |
|
SU1379145A1 |
| Гидромеханический привод пере-дВижЕНия ТягАчЕй зЕМлЕРОйНОгООбОРудОВАНия | 1979 |
|
SU853028A1 |
| Система управления четырехгусеничной машиной | 1989 |
|
SU1682230A1 |
| МАШИНА ДЛЯ ВСКРЫТИЯ ТРУБОПРОВОДА И РАБОЧИЙ ОРГАН | 1997 |
|
RU2112841C1 |
| Проходческо-добычный комбайн | 1985 |
|
SU1288293A1 |
| Устройство управления рабочим процессом землеройно-транспортной машины | 1986 |
|
SU1323672A1 |
| Шнековый траншеезасыпатель | 1988 |
|
SU1602943A1 |
Изобретение относится к автоматизации землеройно-транспортных машин. Цель - повышение точности управления положением рабочего органа (РО) 24 в горизонтальной плоскости. Для этого устройство снабжено верхним 23 и нижним 20 кронштейнами (К), соединенными друг с другом тягами 21 и 22. На РО 24 закреплен торцом верхний К 23, соединенный посредством верхней пружины 25 сжатия с тягой 21, а с копиром 15 в виде лыжи 16 соединен торцом К 20. Посредством нижней пружины 26 сжатия копир 15 связан с другим торцом К 20. На верхнем К 23 установлен датчик 8 линейного отклонения, а на нижнем - датчик 11 углового отклонения. Датчики 8 и 11 подключены к гидравлической системе управления соответственно правой и левой тележек гусеничного хода землеройно-транспортной машины. Под воздействинеем возмущающих факторов линейного и углового отклонений РО 24 в горизонтальной плоскости от заданного курса тяги 21 и 22 смещаются в поперечной плоскости под воздействием пружины 25. Лыжа 16 перемещается поверхностью 17 к копирам 15. Толкатели золотников датчика 8, контактирующие с выступами внешней тяги 22, смещаются из нейтрального положения и формируют в одной из гидролиний 9, 10 гидравлический сигнал управления, пропорциональный величине линейного отклонения РО 24. При движении на повороте в сторону борта, на котором размещена лыжа 16, разворот и надежный прижим лыжи 16 к копирам 15 обеспечивается пружиной 26. 3 ил.
иг./
торцом верхний К 23, соединенный посредством верхней пружины 25 ежа тия с тягой 21, ас копиром J5 в виде лыжи 16 соединен торцом К 20. Посредством нижней пружины 26 сжатия копир 15 связан с другим торцом К 20. На верхнем К 23 установлен датчик 8 линейного отклонения, а на нижнем - датчик П углового отклоне ния. Датчики 8 и 11 подключены к гидравлической системе управления соответственно правой и левой теле жек гусеничного хода землеройно- транспартной машины. Под воздействи ем возмущающих факторов линейного и углового отклонений РО 24 в гориИзобретение относится к автоматизации землеройно-транспортных машин (ЗТМ), а именно к системам управления рабочим органом ЗТМ в горизонталь- ной плоскости, которое осуществляется посредством управления движением машины по заданному механическим копиром курсу.
Цель изобретения - повышение точности управления положением рабочего органа в горизонтальной плоскости.
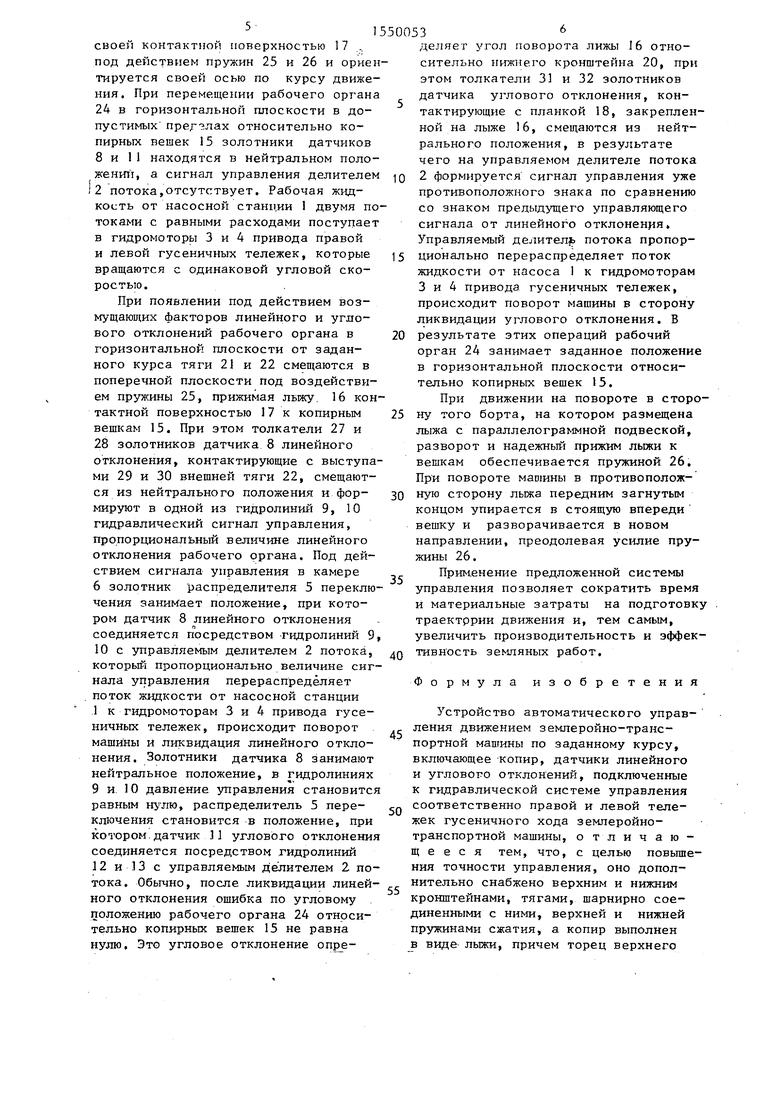
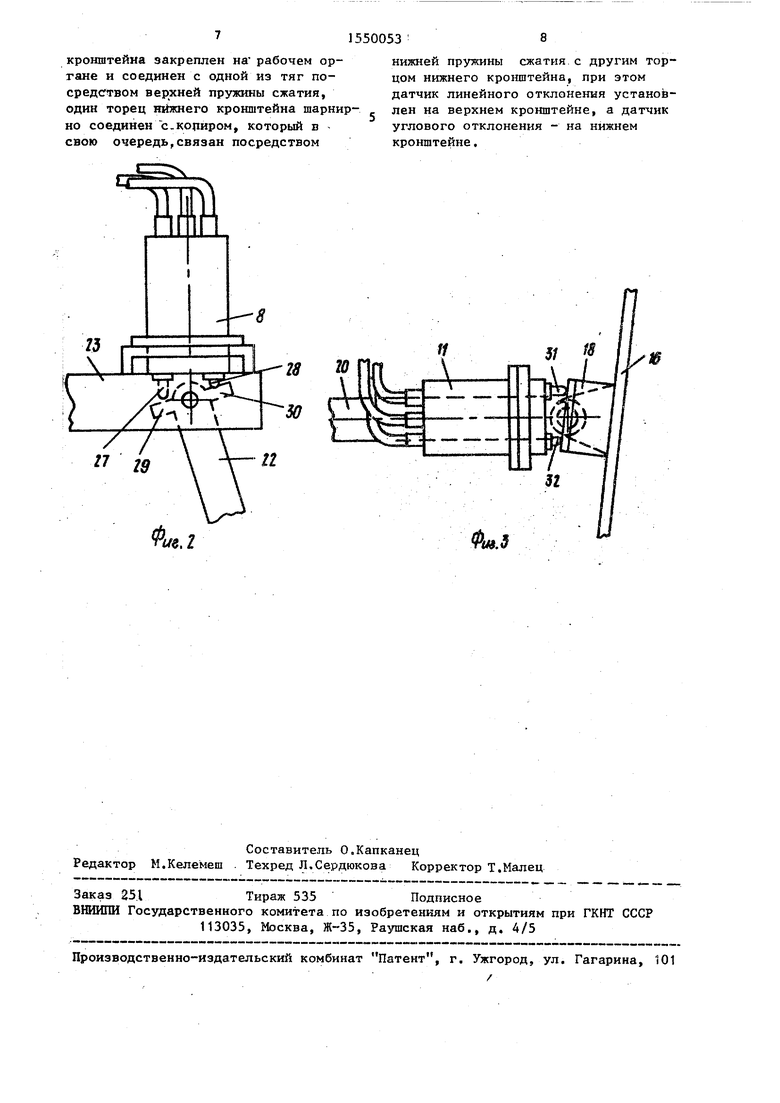
На фиг. Схематически изображено устройство, общий вид; на фиг.2 - крепление датчика линейного отклонения -на верхнем кронштейне, вид сбоку; на фиг.З - крепление датчика углового отклонения на нижнем кронштейне, вид сверху.
Устройство содержит насосную
станцию переменной производительности, управляемый делитель 2 потока, гидромоторы 3 и 4 привода правой и левой гусеничных тележек, распределитель 5 переключения с камерой 6 управления, клапан ИЛИ 7, датчик 8 линейного отклонения с гидролиниями 9 и 10 управления, датчик 11 углового отклонения с гидролиниями 12 и
13управления, аккумуляторный блок
14для запитки датчиков, копир 15, выполненный в виде вертикальных вешек, с которыми контактирует лыжа 16 с вертикальной контактной поверхно- стью 17, снабженная планкой 18 и закрепленная при помощи шарнира 19 на нижнем кронштейне 20, связанном посредством шарнирно соединенных параллельных внутренней 21 и внешней
3
зонтальной плоскости от заданного курса тяги 21 и 22 смещаются в поперечной плоскости под воздействием пружины 25, Лыжа 16 перемещается поверхностью 17 к копирам 15. Толкатели золотников датчика 8, контактирующие с выступами внешней тяги 22, смещаются из нейтрального положения
и формируют в одной из гидролиний
9, 10 гидравлический сигнал управления, пропорциональный величине линейного отклонения РО 24. При движении на повороте в сторону..борта, на
котором размещена лыжа 16, разворот
и надежный прижим лыжи 16 к копирам , J5 обеспечивается пружиной 26. 3 ил.
,-
0
5
0
5
0
22 тяг с верхним кронштейном 23, который установлен на рабочем органе 24 машины, причем верхний конец внутренней тяги 21 соединен с подвижным концом пружины 25 сжатия, неподвижный конец которой закреплен на верхнем кронштейне 23, нижний кронштейн 20 соединен с неподвижным концом пружины 26 сжатия, подвижный конец которой закреплен на заднем конце лыжи 16, при этом датчик 8 линейного отклонения установлен на верхнем кронштейне 23 таким образом, что толкатели 27 и 28 золотников датчика упираются в выступы 29 и 30 внешней тяги 22, а датчик П углового отклонения установлен на нижнем кронштейне 20 таким образом, что толкатели 31 и 32 золотников датчика упираются в планку 18, закрепленную на лыже 6.
Система работает следующим образом.
Перед началом работы размечают траекторию движения, например, при помощи погруженных (забитых или ввинченных) в грунт вертикальных вешек 15, расстояние между которыми не превышает величины прямолинейного участка лыжи от переднего конца до оси шарнира крепления ее на нижнем кронштейне. Кривые в плане задаются ломаной линией, как и в случае копир- ного троса. Б процессе движения ЗТМ по заданному вешками курсу лыжа 16, имеющая возможность поперечно-параллельных и угловых горизонтальных перемещений, прижимается к вешкам 15
своей контактной поверхностью 17 , под действием пружин 25 и 26 и ориентируется своей осью по курсу движения. При перемещении рабочего органа 24 в горизонтальной плоскости в допустимых прегэлах относительно ко- пирньгх вешек 15 золотники датчиков
8и 11 находятся в нейтральном положении, а сигнал управления делителем
12 потока,отсутствует. Рабочая жидкость от насосной станпии 1 двумя потоками с равными расходами поступает в гидромоторы 3 и 4 привода правой и левой гусеничных тележек, которые вращаются с одинаковой угловой скоростью.
При появлении под действием возмущающих факторов линейного и углового отклонений рабочего органа в горизонтальной плоскости от заданного курса тяги 21 и 22 смещаются в поперечной плоскости под воздействием пружины 25, прижимая лыжу 16 контактной поверхностью 17 к копирным вешкам 15. При этом толкатели 27 и 28 золотников датчика 8 линейного отклонения, контактирующие с выступами 29 и 30 внешней тяги 22, смещаются из нейтрального положения и формируют в одной из гидролиний 9, 10 гидравлический сигнал управления, пропорциональный величине линейного отклонения рабочего органа. Под действием сигнала управления в камере 6 золотник распределителя 5 переключения занимает положение, при котором датчик 8 линейного отклонения соединяется посредством гидролиний 9, 10 с управляемым делителем 2 потока, который пропорционально величине сигнала управления перераспределяет поток жидкости от насосной станции 1 к гидромоторам 3 и 4 привода гусеничных тележек, происходит поворот машины и ликвидация линейного отклонения. Золотники датчика 8 занимают нейтральное положение, в гидролиниях
9и 10 давление управления становится равным нулю, распределитель 5 переключения становится в положение, при котором датчик 11 углового отклонения соединяется посредством гидролиний
12 и 13 с управляемым делителем 2 потока. Обычно, после ликвидации линей- ,. нителъно снабжено верхним и нижним
ного отклонения ошибка по угловому положению рабочего органа 24 относительно копирных вешек 15 не равна нулю. Это угловое отклонение опрекронштейнами, тягами, шарнирно соединенными с ними, верхней и нижней пружинами сжатия, а копир выполнен в виде лыжи, причем торец верхнего
00536
деляет угол поворота лижы 16 относительно нижнего кронштейна 20, при этом толкатели 3 и 32 золотников датчика углового отклонения, контактирующие с планкой 18, закрепленной на лыже 16, смещаются из нейт0
5
0
5
0
5
0
5
0
рального положения, в результате чего на управляемом делителе потока
2формируется сигнал управления уже противоположного знака по сравнению со знаком предыдущего управляющего сигнала от линейного отклонения Управляемый делитель потока пропорционально перераспределяет поток жидкости от насоса 1 к гидромоторам
3и 4 привода гусеничных тележек, происходит поворот машины в сторону ликвидации углового отклонения. В результате этих операций рабочий орган 24 занимает заданное положение в горизонтальной плоскости относительно копирных вешек 15.
При движении на повороте в сторону того борта, на котором размещена лыжа с параллелограммной подвеской, разворот и надежный прижим лыжи к вешкам обеспечивается пружиной 26. При повороте машины в противоположную сторону лыжа передним загнутым концом упирается в стоящую впереди вешку и разворачивается в новом направлении, преодолевая усилие пружины 26.
Применение предложенной системы управления позволяет сократить время и материальные затраты на подготовку траектории движения и, тем самым, увеличить производительность и эффективность земляных работ.
Формула изобретения
Устройство автоматического управления движением землеройно-транс- портной машины по заданному курсу, включающее копир, датчики линейного и углового отклонений, подключенные к гидравлической системе управления соответственно правой и левой тележек гусеничного хода землеройно- транспортной машины, отличающееся тем, что, с целью повышения точности управления, оно дополкронштейнами, тягами, шарнирно соединенными с ними, верхней и нижней пружинами сжатия, а копир выполнен в виде лыжи, причем торец верхнего
кронштейна закреплен на рабочем органе и соединен с одной из тяг посредством верхней пружины сжатия, один торец нижнего кронштейна шарнир- но соединен с.копиром, который в свою очередь,связан посредством
28
Ъг.2
нижней пружины сжатия с. другим торцом нижнего кронштейна, при этом датчик линейного отклонения установлен на верхнем кронштейне, а датчик углового отклонения - на нижнем кронштейне.
