Изобретение относится к угольной промышленности и может быть использовано для автоматизации управления очистными комплексами.
Цель изобретения - повышение точности за счет контроля местонахождения комбайна непосредственно относительно стоек крепи.
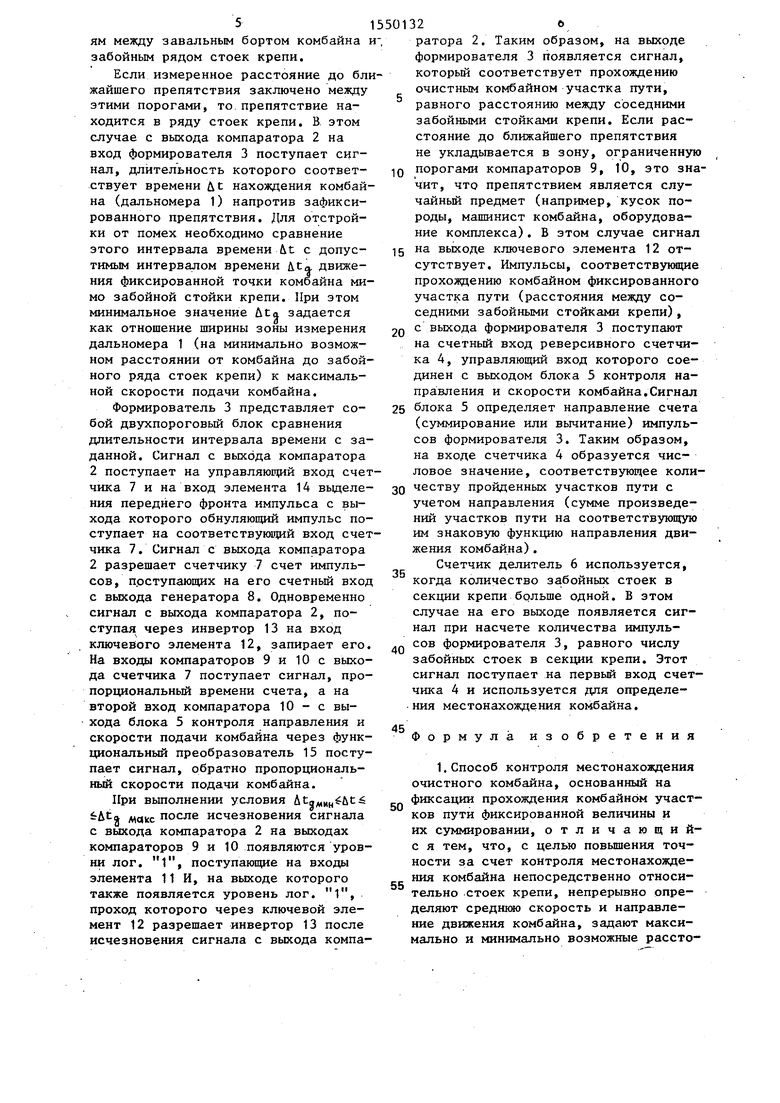
На фиг. 1 представлена функциональная схема устройства, реализующего данный способ; на фиг. 2 - функциональная схема формирователя, являющегося составной частью устройства.
Сущность способа заключается в фиксации прохождения комбайном определенных участков пути и их суммировании. При этом непрерывно определяют среднюю скорость и направление движения комбайна, задают максимально и минимально возможные расстояния от завального борта комбайна до забойного ряда стоек механизированной крепи ширину зоны измерения этого расстояния, расстояние между соседними стойками и минимальное время движения фиксированной точки комбайна мимо забойной стойки крепи. При этом непрерывно измеряют расстояние от завального борта очистного комбайна до ближайшего препятствия с завальной стороны, сравнивают измеренную величину с заданными и контролируют время, в течение которого она не больше максимальной и не меньше минимальной заданной. Если это расстояние лежит в заданных пределах, а время не меньше заданного минимального времени движения фиксированной точки комбайна мимо забойной стойки крепи и не больше отношения ширины зоны измерения расстояния к средней скорости комбайна, то препятствие идентифицируют как стойку крепи и фиксируют прохождение комбайном участка пути, равного расстоянию между соседними забойными стойками крепи механизированного комплекса. Местонахождение комбайна определяют как суммарное количество фиксированных участков пути, равных шагу установки стоек крепи с учетом направления движения комбайна.
В некоторых типах выпускаемых механизированных крепей количество забойных стоек s каждой секции крепи превышает одну. При этом целесообразно величину фиксированного участка также принимать равной шагу установ0
5
0
5
0
5
0
5
0
5
ки секций, но фиксировать прохождение такого уч%стка только при насче- те числа забойных стоек, равного количеству последних в секции крепи.
Введение новых операций (в частности двойного контроля прохождения комбайном стойки крепи) позволяет избежать влияния помех и контролировать непосредственно положение комбайна относительно стоек крепи.
В состав устройства (фиг. 1) входят дальномер 1, выход которого соединен с входом двухпорогового компаратора 2, выход которого связан со входом формирователя 3. Выход формирователя 3 соединен со счетным входом реверсивного счетчика 4, управляющий вход которого соединен с выходом блока 5 контроля направления и скорости подачи комбайна. Если количество забойных стоек в секции крепи больше одной, в устройство вводится счетчик-делитель 6 (на фиг. 1 изображен пунктирной линией), вход которого соединен с выходом формирователя -3, а выход - со счетным входом реверсивного счетчика 4.
Формирователь 3 (фиг. 2) состоит из счетчика 7, счетный вход которого соединен с выходом генератора 8 прямоугольных импульсов. Выход счетчика 7 соединен с входами компараторов 9 и 10, взаимно инверсные выходы которых соединены со входами элемента 11 И, выход которого соединен с информационным входом ключевого элемента 12, управляющий вход которого соединен через инвертор 13 с управляющим входом счетчика 7, который через элемент 14 выделения переднего фронта импульса связан с его обнуляющим входом. Вход компаратора 10 связан с блоком 5 контроля направления и скорости подачи через функциональный преобразователь 15.
Устройство работает следующим образом.
Дальномер 1, установленный на комбайне, постоянно измеряет расстояние между завальным бортом очистного комбайна и ближайшим препятствием с завальной стороны от него. Сигнал, соответствующий измеренному расстоянию, подается с выхода дальномера 1 на вход компаратора 2, где сравнивается с двумя порогами, -которые соответствуют минимальному и максимальному возможным расстояниS1
ям между завальным бортом комбайна и забойным рядом стоек крепи.
Если измеренное расстояние до бли жайшего препятствия заключено между этими порогами, то препятствие находится в ряду стоек крепи. В этом случае с выхода компаратора 2 на вход формирователя 3 поступает сигнал, длительность которого соответ- ствует времени &t нахождения комбайна (дальномера 1) напротив зафиксированного препятствия. Для отстройки от помех необходимо сравнение этого интервала времени &t с допус- тимым интервалом времени uta. движения фиксированной точки комбайна мимо забойной стойки крепи. При этом минимальное значение &ta задается как отношение ширины зоны измерения дальномера 1 (на минимально возможном расстоянии от комбайна до забойного ряда стоек крепи) к максимальной скорости подачи комбайна.
Формирователь 3 представляет со- бой двухпороговый блок сравнения длительности интервала времени с заданной. Сигнал с выхода компаратора 2 поступает на управляющий вход счетчика 7 и на вход элемента 14 выделе- ния переднего фронта импульса с выхода которого обнуляющий импульс поступает на соответствующий вход счетчика 7. Сигнал с выхода компаратора 2 разрешает счетчику 7 счет импульсов, поступающих на его счетный вход с выхода генератора 8. Одновременно сигнал с выхода компаратора 2, поступая через инвертор 13 на вход ключевого элемента 12, запирает его. На входы компараторов 9 и 10 с выхода счетчика 7 поступает сигнал, пропорциональный времени счета, а на второй вход компаратора 10 - с выхода блока 5 контроля направления и скорости подачи комбайна через функциональный преобразователь 15 поступает сигнал, обратно пропорциональный скорости подачи комбайна.
При выполнении условия t&ta Мо,кс после исчезновения сигнала с выхода компаратора 2 на выходах компараторов 9 и 10 появляются уровни лог. 1, поступающие на входы элемента 11 И, на выходе которого
также появляется уровень лог. 1, проход которого через ключевой элемент 12 разрешает инвертор 13 после исчезновения сигнала с выхода компа
5 о
5 о 0
5
5
32о
ратора 2. Таким образом, на выходе формирователя 3 появляется сигнал, который соответствует прохождению очистным комбайном участка пути, равного расстоянию между соседними забойными стойками крепи. Если расстояние до ближайшего препятствия не укладывается в зону, ограниченную порогами компараторов 9, 10, это значит, что препятствием является случайный предмет (например, кусок породы, машинист комбайна, оборудование комплекса). В этом случае сигнал на выходе ключевого элемента 12 отсутствует. Импульсы, соответствующие прохождению комбайном фиксированного участка пути (расстояния между соседними забойными стойками крепи), с выхода формирователя 3 поступают на счетный вход реверсивного счетчика 4, управляющий вход которого соединен с выходом блока 5 контроля направления и скорости комбайна.Сигнал блока 5 определяет направление счета (суммирование или вычитание) импульсов формирователя 3. Таким образом, на входе счетчика 4 образуется числовое значение, соответствующее количеству пройденных участков пути с учетом направления (сумме произведений участков пути на соответствующую им знаковую функцию направления движения комбайна).
Счетчик делитель 6 используется, когда количество забойных стоек в секции крепи больше одной. В этом случае на его выходе появляется сигнал при насчете количества импульсов формирователя 3, равного числу забойных стоек в секции крепи. Этот сигнал поступает на первый вход счетчика 4 и используется для определения местонахождения комбайна.
Формула изобретения
1.Способ контроля местонахождения очистного комбайна, основанный на фиксации прохождения комбайном участков пути фиксированной величины и их суммировании, отличающий- с я тем, что, с целью повышения точности за счет контроля местонахождения комбайна непосредственно относительно стоек крепи, непрерывно определяют среднюю скорость и направление движения комбайна, задают максимально и минимально возможные рассто
яния от завального борта комбайна до забойного ряда стоек механизированной крепи, ширину зоны измерения этого расстояния, расстояние между соседними стойками, минимальное время движения фиксированной точки комбайна мимо забойной стойки крепи, непрерывно измеряют расстояние от завального борта очистного комбайна до ближайшего препятствия с завальной стороны, сравнивают измеренную величину с заданными и контролируют время, в течение которого она не больше максимальной и не меньше минимальной заданной, если это время не меньше минимального заданного времени движения фиксированной точки комбайна мимо забойной стойки крепи и не больше отношения ширины зоны измерения расстояния к средней скорости комбайна, фиксируют прохождение комбайном участка пути, равного шагу установки секций крепи, при этом местонахождение комбайна опреде ляют как сумму произведений длин фиксированных участков пути, равных шагу установки секций крепи, на соответствующую им знаковую функцию направления движения комбайна.
2,Способ по п. 1, отличающийся тем, что, с целью повышения точности при количестве забойных стоек в секции крепи, превышающей одну, фиксируют прохождение комбайном участка пути, равного шагу установки секций крепи, при насчете числа забойных стоек, равном количеству последних в секции крепи.
3.Устройство контроля местонахождения очистного комбайна, содержащее реверсивный счетчик, управляющий вход которого соединен с выходом блока контроля направления и скорос
5
0
0
5
0
5
ти подачи комбайна, отличающееся тем, что, с целью повышения точности за счет контроля местонахождения комбайна непосредственно относительно стоек крепи, оно снабжено дальномером, счетчиком, генератором прямоугольных импульсов, Двумя компараторами, двухпороговым компаратором, элементом выделения переднего фронта импульса, инвертором, функциональным преобразователем, элементом И и ключевым элементом, при этом выход дальномера через двух- пороговый компаратор соединен с входами инвертора, элемента выделения переднего фронта импульса и управляющим входом счетчика, при этом выходы генератора прямоугольных импульсов и элемента выделения переднего фронта импульса подключены соответственно к счетному и обнуляющему входам счетчика, а выход последнего соединен с входами двух компараторов, взаимно инверсные выходы которых через двухвходовый элемент И подключены к.информационному входу ключевого элемента, управляющий вход которого соединен с выходом инвертора, а выход ключевого элемента соединен со счетным входом реверсивного счетчика, при этом выход блока контроля направления и скорости подачи комбайна через функциональный преобразователь соединен также с вторым входом одного из компараторов.
4. Устройство по п. 3, отличающееся тем, что, с целью повышения точности при количестве забойных стоек в секции крепи, превышающем одну, оно дополнительно снабжено счетчиком-делителем, вход которого соединен с выходом ключевого элемента, а выход - со счетным входом реверсивного счетчика.
Фив. 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения местоположения очистного комбайна | 1988 |
|
SU1629531A1 |
| Способ управления очистным комплексом | 1988 |
|
SU1523661A1 |
| Система программного управления очистным комбайном в профиле калийного пласта | 1989 |
|
SU1810534A1 |
| СЕКЦИЯ КРЕПИ ОЧИСТНОГО МЕХАНИЗИРОВАННОГО КОМПЛЕКСА | 1991 |
|
RU2027012C1 |
| СПОСОБ КОНТРОЛИРУЕМОГО СОБЛЮДЕНИЯ ЗАЗОРА МЕЖДУ ВЕРХНИМ ПЕРЕКРЫТИЕМ И УГОЛЬНЫМ ЗАБОЕМ В ОЧИСТНЫХ ЗАБОЯХ | 2008 |
|
RU2470156C2 |
| СПОСОБ РАЗРАБОТКИ И ПОДЗЕМНОГО ИСПОЛЬЗОВАНИЯ УГЛЯ ПО СИСТЕМЕ ДОЛИНСКОГО, РСД, СПОСОБ РАЗРАБОТКИ НАРУШЕННЫХ ПЛАСТОВ, ПОДЗЕМНЫЙ ГЕНЕРАТОР ЭЛЕКТРОЭНЕРГИИ (ВАРИАНТЫ), ЗАБОЙНЫЙ СКРЕБКОВЫЙ КОНВЕЙЕР, СВАРНОЙ РЕШТАК СКРЕБКОВОГО КОНВЕЙЕРА, СПАРЕННАЯ ЦЕПЬ СКРЕБКОВОГО КОНВЕЙЕРА, СПОСОБ УПРАВЛЕНИЯ КОМПЛЕКСОМ ДЛЯ БЕЗЛЮДНОЙ ВЫЕМКИ УГЛЯ | 2002 |
|
RU2244829C2 |
| Способ программного управления очистным комбайном в профиле пласта | 1990 |
|
SU1756557A1 |
| СПОСОБ КРЕПЛЕНИЯ И УПРАВЛЕНИЯ КРОВЛЕЙ В ОЧИСТНОМ ЗАБОЕ, КРЕПЬ ДЛЯ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА, МЕХАНИЗМ ТЕЛЕСКОПИЧЕСКОЙ ЗАТЯЖКИ ЗАЗОРОВ ПО КРОВЛЕ И ЗАВАЛУ, СОЕДИНЕНИЕ ОСНОВАНИЙ СЕКЦИЙ, НАПРАВЛЯЮЩАЯ БАЛКА КРЕПИ, МЕХАНИЗМ РАСПОРА СЕКЦИЙ КРЕПИ, МЕХАНИЗМ СКЛАДЫВАНИЯ КРЕПИ, КОЗЫРЕК ПЕРЕКРЫТИЯ КРЕПИ | 2001 |
|
RU2200843C2 |
| Механизированная пневматическая крепь | 1988 |
|
SU1696721A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДОЛИНСКОГО МКД, СИСТЕМА УПРАВЛЕНИЯ КРЕПЬЮ, МЕЖСЕКЦИОННАЯ ЗАТЯЖКА КРЕПИ, ГИДРОСИСТЕМА КРЕПИ | 1999 |
|
RU2181842C2 |
Изобретение относится к угольной промышленности и может быть использовано для автоматизации управления очистными комплексами. Цель - повышения точности за счет контроля местонахождения комбайна (К) непосредственно относительно стоек крепи (СК). Для этого непрерывно определяют среднюю скорость и направление движения К, задают интервал возможных расстояний (Р) от К до СК, ширину его зоны измерения, Р между соседними СК и минимальное время движения К мимо одной СК. Затем непрерывно измеряют Р от К до препятствия с завальной стороны, сравнивают измеренную величину с заданным интервалом, и контролируют время, в течение которого она лежит в заданном интервале. Если это время не меньше заданого минимального времени движения К мимо СК и не больше отношения ширины зоны измерения Р к средней скорости К, то препятствие идентифицируют как СК. При этом фиксируют перемещение К на величину, равную заданному Р между соседними СК. Местонахождение К определяют как сумму этих перемещений с учетом направления движения К. Если количество СК в каждой секции крепи больше одной, то фиксируют прохождение К данной секции только при насчете числа СК, равного их количеству в секции крепи. Способ реализуется устройством, состоящим из последовательно соединенных дальномера 1, двухпорогового компаратора 2 для контроля расстояния от К до препятствия, формирователя 3 счетчика-делителя 6, реверсивного счетчика 4 и блока 5 контроля направления и скорости подачи К. Приведено конструктивное выполнение формирователя 3, представляющего собой двухпороговый блок сравнения длительности интервала времени с заданной, на выходе которого формируется сигнал прохождения К участка пути, равного Р между соседними забойными СК. 2 с. и 2 з.п. ф-лы, 2 ил.
/f&t
| ДАТЧИК МЕСТОНАХОЖДЕНИЯ ОБЪЕКТА | 0 |
|
SU309131A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Системы и средства автоматизации забойного оборудования / В.А.Антипов и др | |||
| Киев / Техника, 1984, с | |||
| Пружинная погонялка к ткацким станкам | 1923 |
|
SU186A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Руководство по эксплуатации | |||
| Донецк, Донавтомат- гормаи, 1982, с | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
