Изобретение относится к угольной промышленности и предназначено для автоматизированного определения местоположения очистного комбайна относительно стоек крепи
to
f5
20
Целью изобретения является повышение точности путем увеличения надежности идентификации стоек крепи
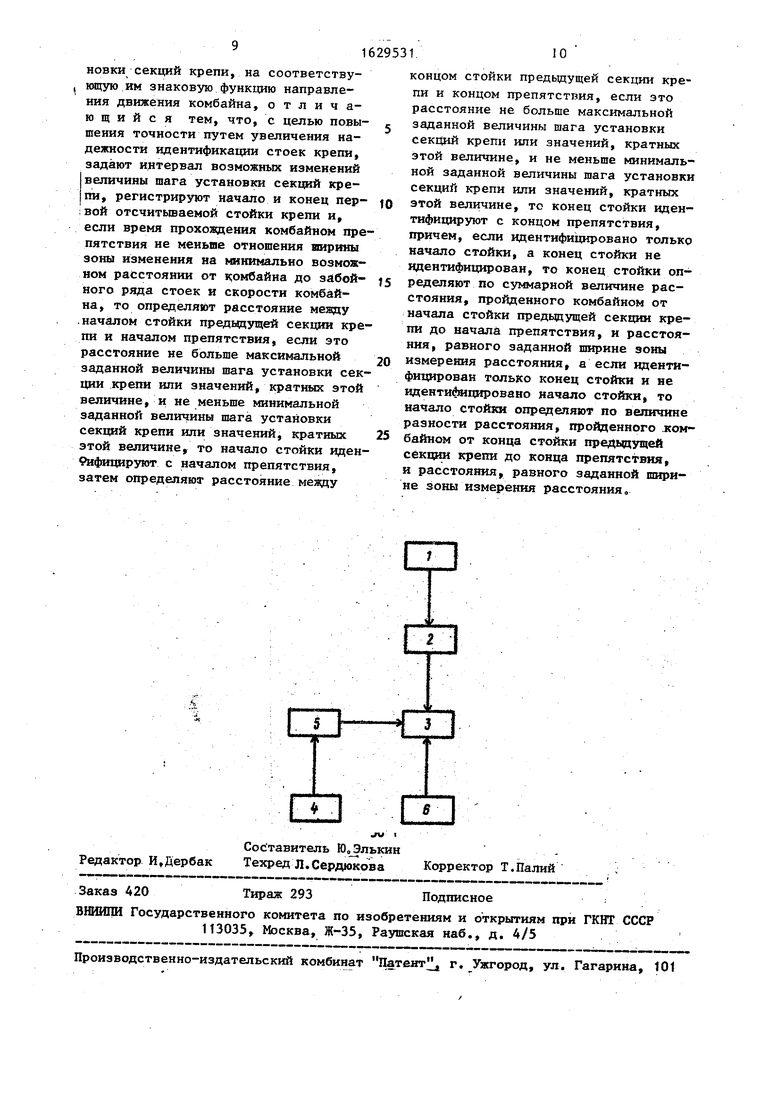
На чертеже приведена функциональная схема устройства, реализующего предлагаемый способ
Сущность способе заключается в фиксации прохождения комбайном препятствий, их идентификации как стоек крепи и суммировании участков пути равных или кратных шагу установки секций крепис При этом задают величину шага установки секций крепи и ее максимальное и минимальное значение, задают величину ширины зоны измерения расстояния до препятствия и ее минимальное значение, регистрируют начало и конец первой отсчитываемой стойки крепи и задают максимальное и минимальное расстояние от ближнего к забою ряда стоек крепи до комбайна. В процессе работы непрерывно опредеяют направление и скорость движения комбайна и измеряют расстояние от 25 комбайна до ближайшего препятствия с завальной стороны комбайна, сравниая измеренное расстояние с заданными максимальным и минимальным значениями Если это расстояние не больше максимально заданного и не меньше минимально заданного, то определяют время прохождения комбайна от начала препятствия до конца препятствия Если это время не меньше отношения минимального значения ширины зоны изерения расстояния к скорости комбайна, то определяют расстояние между началом стойки предыдущей секции крепи и началом препятствия. При этом, до есйи это расстояние не больше величин, равных или кратных максимально заданному значению шага установки секций крепи, и не меньше величин, равных или кратных минимально заанному значению шага установки секций крепи, то начало стойки идентифицируют с началом препятствия.
Затем определяют расстояние меж- ду концом стойки предыдущей секции крепи и концом препятствия. Если это расстояние не больше величин, равных или кратных максимально заданному значению шага установки секций крепи, и не меньше величин, равных или кратных минимально заданному зна чению шага установки секций крепи то конец стойки идентифицируют с концом препятствия. Причем, если идентифи30
35
45
50
,.55
to
f5
20
. 25 до
30
35
45
50
55
цировано только начало стойки, а1конец стойки не идентифицирован, то конец стойки определяют по суммарной величине расстояния, пройденного комбайном от начала стойки предыдущей секции крепи до начала препятствия, и расстояния, равного заданной ширине зоны измерения препятствия. Если же идентифицирован только конец стойки, а не идентифицировано начало стойки, то начало стойки определяют по величине разности расстояния, пройденного комбайном от конца стойки предыдущей секции крепи до конца препятствия, и расстояния, равного заданной ширине зоны измерения препятствия При этом фиксируют прохождение комбайном стойки секции крепи и регистрируют перемещение комбайна на расстояние, равное или кратное шагу установки секций крепи Местоположение комбайна определяется с учетом направления е.го движения, как суммарное количество участков пути, равных шагу установки секций крепи
Измерение расстояния от комбайна до ближайшего препятствия с завальной стороны комбайна и сравнение его с заданными граничными значениями позволяет провести первую селекцию помех, т.е. отсеять все препятствия, находящиеся не в ряду стоек крепи, а, например, за стойкой или перед ней. Это увеличивает быстродействие и точность работы системы по способу Если обнаружено препятствие в ряду стоек, то оно проверяется в дальнейшем на соответствие стойке, а если препятствие обнаружено за рядом стоек, то оно не учитывается и проводится дальнейший контроль на обнаружение препятствия по данному признаку.
Для того, чтобы удостовериться, действительно ли в ряду стоек обнаружена стойка, а не препятствие меньшего размера, чем ширина стойки крепи, проводится вторая селекция препятствий по времени прохождения комбайна от начала обнаруженного препятствия до его конца. Если это время не соответствует времени прохождения минимально заданного значения ширины зоны измерения расстояния до препятствия при определенной к этому моменту скорости комбайна, то считается, что обнаруженное препятствие не является стойкой и поэтому оно не учитывается, и проводится дальнейший поиск других препятствий в ряду стоек крепи. Если ширина препятствия не меньше ширины стойки крепи, то проводится дальнейшая селекция стойки от препятствия Для этого определяют расстояние между началом стойки предшествующей секции крепи и началом рассматриваемого препятствия, а затем - между концом стойки предшествующей секции и концом препятствия (при его достижении во время движения комбайна). Для обоих случаев сравнивают каждое из расстояний с технологической постоянной - шагом установки секций крепи (с учетом граничных значений)„ При совпадении делают вывод о том, что рассматриваемое препятствие расположено на расстоянии, соответствующем постановке очередной стойки секции крепи, и, учитывая точную регистрацию начала и конца первой отсчитываемой стойки и соответствие препятствия стойке крепи по первым двум уровням селекции, начало препятствия идентифицируется с началом стойки, а конец препятствия - с концом стойки.
Возможен вариант, когда стойка кре затенена
пи затенена или к ней с обеих по ходу движения комбайна сторон прислонены куски, например, породы. Для этой стойки не удается определить начало и конец и, следовательно, отличить ее от помехи В этом случае только следующая по ходу движения помеха (препятствие) может быть идентифицирована как стойка о Для этого случая сравнение пройденного расстояния нем10
6295316
идентифицируемой стойки вычитают заданную ширину зоны измерения расстояния о Расстояния можно определять,например, через контролируемое время прохождения требуемых точек и непрерывно определяемую скорость движения комбайнао
Только полностью идентифицированный конец и начало стойки могут достоверно зарегистрировать (зафиксировать) прохождение комбайном стойки крепи, а не какого-либо препятствия. Б зарегистрированный участок между стойкой предшествующей секции крепи и зафиксированной стойкой может уложиться одна или несколько величин шага установки секций крепи, поэтому и местоположение комбайна определяется, как суммарное количество определенных участков пути, равных шагу установки секций крепи (с учетом направления движения комбайна)„
Механизированная крепь и очистной комбайн располагаются в выработанном пространстве угольного пласта, они снабжены аппаратурой, позволяющей им функционировать в автоматизированном режиме. Устройство, реализующее предлагаемый способ, размещается на комбайне и состоит из дальномера 1, блока 2 согласования дальномера 1 с микроЭВМ 3, блока 4 контроля направления движения и скорости комбайна, блока 5 согласования блока 4 контроля направления и скорости с микроЭВМ 3 и пульта 6 управления„Место крепления дальномера 1 на комбайне является контрольной точкой при
15
20
25
30
35
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля местонахождения очистного комбайна и устройство для его осуществления | 1988 |
|
SU1550132A1 |
| Способ управления очистным комплексом | 1988 |
|
SU1523661A1 |
| Способ позиционирования проходческого комбайна и коронки его исполнительного органа | 2023 |
|
RU2830692C1 |
| Способ развития лавы из базисной выработки | 1989 |
|
SU1694921A1 |
| СПОСОБ КОНТРОЛИРУЕМОГО СОБЛЮДЕНИЯ ЗАЗОРА МЕЖДУ ВЕРХНИМ ПЕРЕКРЫТИЕМ И УГОЛЬНЫМ ЗАБОЕМ В ОЧИСТНЫХ ЗАБОЯХ | 2008 |
|
RU2470156C2 |
| Временная передвижная крепь для подготовительных выработок | 1975 |
|
SU768999A1 |
| Способ программного управления очистным комбайном в профиле пласта | 1990 |
|
SU1756557A1 |
| Выемочное оборудование для подземной горной разработки, в частности, калийных солей | 1989 |
|
SU1834974A3 |
| Система программного управления очистным комбайном в профиле калийного пласта | 1989 |
|
SU1810534A1 |
| Способ охраны пластовой горной выработки | 1989 |
|
SU1684511A1 |
Изобретение относится к угольной пром-ти и предназначено для автоматизированного определения местоположения очистного комбайна (К) относительно стоек (С) крепи. Цель - повышение точности путем увеличения надежности идентификации С. Способ основан на идентификации препятствия (П) с завальной стороны К как С крепи по трём уровням селекции: по расстоянию от К до Л, по времени прохождения К мимо П и по расстоянию между П. Для этого непрерывно определяют скорость и направление движения К, измеряют расстояние от К до П и контролируют время, в течение которого это расстояние соответствует заданному интервалу. Если это/ время меньше отношения заданной ширины зоны измерения расстояния от К до С к скорости К, то данное П не учитывается, т.к. его ширина меньше, чем ширина С0 Если это время больше указанного отношения, то переходят к идентификации П по третьему уровню селекциио Для этого регистрируют начало и конец первой С, определяют расстояние между началом и концом П и соответственно началом и концом предыдущей С0 Если эти расстояния равны или кратны заданному шагу установки С крепи, т„е. расстоянию между С, то начало данного П идентифицируют с началом С, а его конец с концом .С. Если идентифицированы или только начало С, или только конец С, то неопределенную часть С фиксируют соответственно по сумме или разности расстояния, пройденного К от соответственно начала или конца предыдущей С, и заданной ширине зоны измерения от К до С. При идентификации П как С фиксируют прохождение К участка пути, равного заданному шагу установки секций крепи. Местоположение К определяется как сумма произведений длин фиксированных участков, равных шагу установки секций крепи, на соответствующую им знаковую функцию направления движения К 1 ило (Л о N2 СО СП 00
обходимо проводить с величинами, крат-до проведении измерений.
Способ реализуют сл
ными граничным значениям шага установки секций крепи
Возможен также случай, когда с одной какой-либо стороны стойки по ходу движения комбайна имеется препятствие (кусок породы и ТоП0). В этом случае удается идентифицировать только начало или только конец стойки по третьему уровню селекции (по расстоянию от предыдущей стойки)„ Поэтому, чтобы идентифицировать вторую сторону стойки необходимо (для конца стойки) просуммировать определенное расстояние между началом предыдущей стойки- и началом идентифицируемой стойки и задан- ную ширину зоны измерения расстояния до препятствия А для начала стойки из определенного расстояния между концом предыдущей стойки и концом
проведении измерений.
Способ реализуют следующим обраЗОМо
Перед началом работы, когда очистной комбайн расположен, например, возле одного из штреков, через пульт 6 управления вводят в микроЭВМ положение относительно контрольной точки на комбайне начала и конца первой (в данном случае крайней) отсчитываемой стойки крепи Затем, если раньше не были введены, через пульт 6 задают все константы, соответствующие конкретному технологическому процессу: величину шага установки секций крепи и ее максимальное и минимальное значения, величину ширины зоны измерения расстояния и ее минимальное значение, максимальное и ми- нимальное расстояния от ближнего к
забою тзяда стоек крепи до контрольной точки.
После начала движения комбайна дальномер 1, установленный на комбайне, постоянно измеряет расстояние между контрольной точкой и ближайшим появляющимся препятствием с завальной стороны комбайна.Одновременно блок 4 контроля направления движения и скорости комбайна определяет направление и скорость непрерывного (без учета остановок) движения комбайна. Дальномер 1 и блок 4 передают результаты своих измерений микроЭВМ 3 через блоки 2 и 5. В микроЭВМ 3 постоянно работает таймер и, когда от дальномера 1 поступает сигнал о препятствии, микроЭВМ 3 обрабатывает такие сигналы и рассчитывает расстояние от контрольной точки до препятствия, сравнивает полученный результат с заданными максимальным и минимальным значениями При соответствии полученного расстояния этим граничным значениям микроЭВМ 3 принимается решение о дальнейшем сравнении, так как препятствие оказалось в ряду стоеко В противном случае вычисления заканчиваются и возобновляются вновь для следующего препятствия Так как таймер в микроЭВМ 3 работает постоянно, то время прохождения контрольной точки мимо препятствия определяется через сигналы от дальномера 1„ Если рассматриваемое препятствие оказывается стойкой, то время не меньше отношения минимального значения ширины зоны измерения расстояния до препятствия к скорости комбайна, а если время оказывается меньше, то это препятствие не является стойкой, а просто помеха диаметра меньшего, чем стойка крепи В таком случае препятствие дальше не рассматривается, а микроЭВМ 3 начинает обрабатывать следующее препятствие о Если помеха оказывается больше диаметра стойки, то ее, обработка проводится по третьему уровню селекции (по расстоянию от предыдущей стойки) Одновременно с обработкой препятствия по второму уровню селекции, тсе„ по времени прохождения мимо него, благодаря сигналам от дальномера 1 и от блока 4 микроЭВМ 3 вычисляет расстояние между началом стойки предыдущей секции крепи и началом рассматриваемого препятствия, а за
0
5
0
5
0
5
0
5
тем проводится идентификация начала стойки по соответствию вычисленного расстояния граничным значениям шага установки секций крепи Аналогичным образом проводится затем идентификация конца стойки Если это действительно стойка и ни с какой ее стороны не примыкает никаких посторонних предметов, то фиксируется прохождение контрольной точкой стойки крепи Если есть посторонние предметы, то кикроЭВМ 3 проводит суммирование или вычитание параметров расстояния (начало - начало или конец - конец) с величиной заданной ширины зоны измерения
Таким образом, определяется затененная помехой сторона стойки крепи и идентифицируется либо начало, либо конец стойки крепи и полностью фиксируется стойка крепи. На этом участке укладывается определенное количество интервалов, равное или кратное шагу установки секций крепи Просуммировав количество таких уже определенных участков, равных шагу установки секций крепи, можно определить местоположение комбайна относительно механизированной крепи и при этом комбайн находится трчно возле зафиксированной стойки секции крепи
Формула изобретения
Способ определения местоположения очистного комбайна, включающий определение скорости и направления движения комбайна, задание шага установки секций крепи, максимально и минимально возможных расстояний от за- 9 вального борта комбайна до забойного ряда стоек крепи и ширины зоны измерений этого расстояния, непрерывное измерение расстояния от завального борта комбайна до ближайшего препятствия, сравнение измеренной величины с заданными и контроль времени прохождения комбайна от начала препятствия до его конца, идентификацию препятствия как стойки крепи при соответствии времени прохождения допустимому интервалу, фиксацию прохождения комбайном участка пути, равного шагу установки секций крепи, и определение местоположения комбайна как суммы произведений длин фиксированных участков, равных шагу установки секций крепи, на соответствующую им знаковую функцию направления движения комбайна, отличающийся тем, что, с целью повы- шения точности путем увеличения надежности идентификации стоек крепи, задают интервал возможных изменений величины шага установки секций крепи, регистрируют начало и конец пер- вой отсчитываемой стойки крепи и, если время прохождения комбайном препятствия не меньше отношения ширины зоны изменения на минимально возможном расстоянии от комбайна до зйбой- ного ряда стоек и скорости комбайна, то определяют расстояние между началом стойки предыдущей секции крепи и началом препятствия, если это расстояние не больше максимальной заданной величины шага установки секции крепи или значений, кратных этой величине, и не меньше минимальной заданной величины шага установки секций крепи или значений, кратных этой величине, то начало стойки иден- 9ифицируют с началом препятствия, затем определяют расстояние между
концом стойки предыдущей секции крепи и концом препятстлия, если это расстояние не больше максимальной заданной величины шага установки секций крепи или значений, кратных этой величине, и не меньше минимальной заданной величины шага установки секций крепи или значений, кратных этой величине, то конец стойки идентифицируют с концом препятствия, причем, если идентифицировано только начало стойки, а конец стойки не идентифицирован, то конец стойки определяют по суммарной величине расстояния, пройденного комбайном от начала стойки предыдущей секции крепи до начала препятствия, и расстояния, равного заданной ширине зоны измерения расстояния, а если идентифицирован только конец стойки и не идентифицировано начало стойки, то начало стойки определяют по величине разности расстояния, пройденного комбайном от конца стойки предыдущей секции крепи до конца препятствия, и расстоянияу равного заданной ширине зоны измерения расстояния.
| Антипов В.А | |||
| и др„ Системы и средства автоматизации забойного оборудования | |||
| - Киев: Техника, 1984, с„ 186 -187 | |||
| Способ контроля местонахождения очистного комбайна и устройство для его осуществления | 1988 |
|
SU1550132A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
