Изобретение относится к механической обработке конических поверхностей деталей с образованием однородного микрорельефа с помощью инструмента, имеющего радиальную подачу и возвратно-поступательное перемещение вдоль обрабатываемой поверхности.
Цель изобретения - повышение качества обработки.
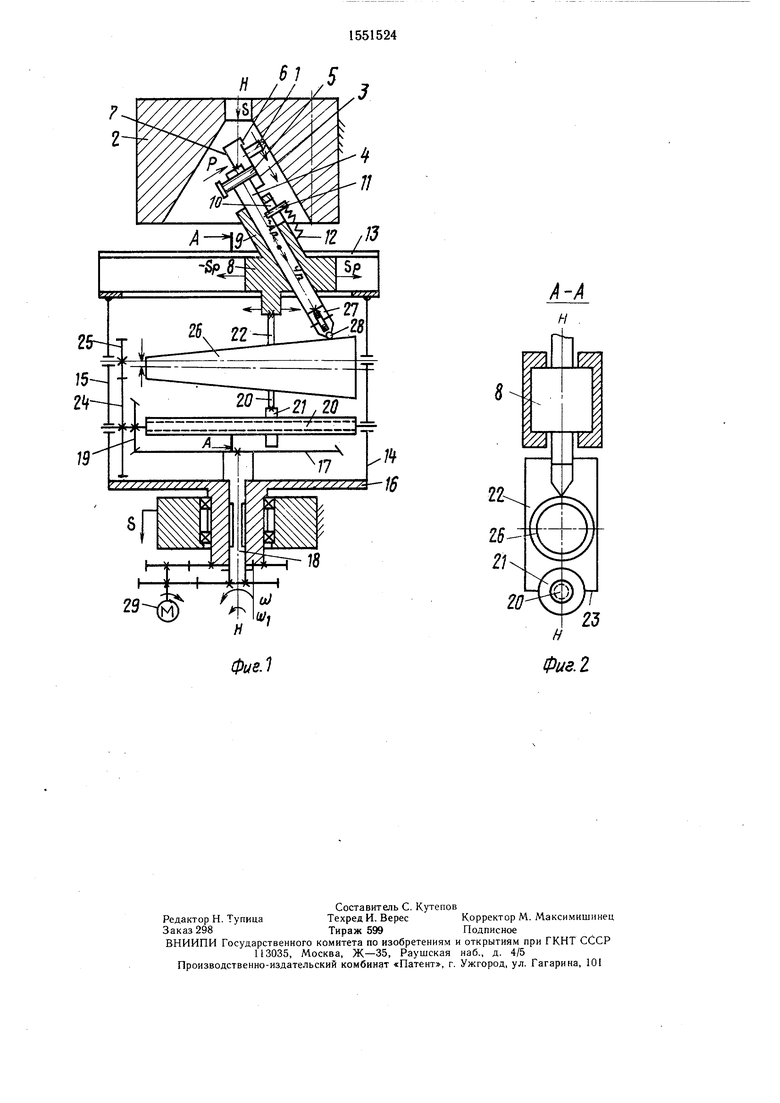
На фиг. представлено устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1.
Устройство содержит инструмент 1, который контактируете конической поверхностью детали 2 и крепится на конце плоской пружины 3, плоскость которой перпендикулярна оси инструмента 1. Второй конец плоской пружины 3 жестко соединен с ползуном 4. Середина пружины 3 контактирует с торцом винта 5.
Конец плоской пружины 3 в зоне инструмента 1 (в его нерабочем положении) контактирует с выступом 6 кронштейна 7, крепящегося к ползуну 4. Ползун 4 установлен в выполненных в каретке 8 под углом к
оси устройства направляющих. В верхней части 9 каретки выполнен продольный паз 10, охватывающий запрессованный в ползун 4 штифт 11, наружный конец которого соединен с пружиной 12, которая в свою очередь соединена с кареткой 8.
Каретка 8 расположена в направляющих 13, которые посредством планок 14 и 15 жестко связаны с водилом 16 планетарного редуктора.
Центральное колесо 17 планетарного редуктора, установленное на валу 18, входит в зацепление с сателлитом 19, на валу которого, в опорах вращения планок 14 и 15, закреплен винт 20, взаимодействующий с гайкой 21, которая посредством держателей 22 и 23 жестко соединена с кареткой 8.
Сателлит 19 через зубчатое колесо 24 связан с сателлитом 25, на валу которого эксцентрично оси вращения установлен эксцентрик 26, выполненный в виде конуса.
С ползуном 4 жестко соединен толкатель 27, взаимодействующий с эксцентриком 26 посредством шариковой опоры 28.
сл
сл
сл ю
Ј:
одило 1-6 и центральное ко песо 17 кинематически связаны с приводом 29 вращения. Направляющие, служащие для пере- ещения ползуна 4, с целью изменения угла Наклона к оси устройства могут быть выполнены отдельно от каретки 8 и крепится к последней известными средствами (не показано).
Устройство работает следующим образом.
Перед обработкой, воздействуя винтом 5 На пружину 3, создают заданное значение усилия, прикладываемого инструментом 1 к Поверхности обрабатываемой детали, вводят Инструмент в контакт с обрабатываемой поверхностью и снабжают устройство приводом подачи (не показано) вдоль оси Н-Н.
Приводом 29 вращения через кинематическую связь сообщается вращательное движение водилу 16 и центральному колесу 17. От водила 16 через направляющие 13, каретку 8 и ползун 4 вращение передается инструменту 1.
От центрального колеса через сателлит 19 вращательное движение передается винту 20, Гайка 21 при этом перемещается вдоль оси бинта, сообщая тем самым радиальное перемещение (Sp) каретке 8 в направляющих 13.
Одновременно от центрального колеса 17 вращательное движение сообщается валу сателлита 25, вместе с которым вращается Конический эксцентрик 26. Последний через шариковую опору 28 и толкатель 27 сооб- |цает возвратно-поступательное перемещение Ползуну 4 и соответственно инструменту 1 Вдоль Обрабатываемой поверхности.
0
Постоянство контакта ползуна к эксцентриком обеспечивается пружиной 12.
Формула изобретения
1. Устройство для чистовой обработки конических поверхностей, содержащее корпус, в направляющих которого установлена каретка, несущая обрабатывающий инструмент, связанная с приводом радиальной-подачи, выполненным в виде винтовой пары, винт которой установлен на валу сателлита планетарного редуктора, причем ось винта расположена перпендикулярно оси центрального колеса планетарного редуктора, отличающееся тем, что, с целью повышения качества обработки, оно снабжено ползуном, установленным в выполненных в каретке под углом к оси коруса направляющих и имеющим привод возвратно-поступательного перемещения, выполненный в виде кулачкового механизма, кулачок которого кинематически связан с планетарным редуктором посредством сателлита, а толкатель - жестко с ползуном, при этом инструмент укреплен на ползуне.
5 2. Устройство по п. 1, отличающееся тем, что гайка винтовой пары жестко соединена с кареткой посредством держателей, охватывающих кулачок с зазором
3.Устройство по пп. 1 и 2, отличающееся тем, что толкатель связан с кулач0 ком посредством шариковой опоры.
4.Устройство по пп. 1-3, отличающееся тем, что кулачок выполнен цилиндрическим.
5.Устройство по пп 1 -3, отличающееся тем, что кулачок выполнен коническим.
0
29
А-А
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство В.С.Проскурова для чистовой обработки конических поверхностей | 1986 |
|
SU1731608A1 |
| Планетарный редуктор | 1990 |
|
SU1740827A1 |
| КРИВОШИП С ПЕРЕМЕННЫМ РАДИУСОМ | 2000 |
|
RU2185897C2 |
| Сканирующее устройство для ультразвукового контроля | 1981 |
|
SU1004868A1 |
| Устройство для нанесения микрорельефов | 1985 |
|
SU1449330A1 |
| Механизм привода промышленного робота | 1989 |
|
SU1660959A1 |
| Грейферное устройство для подачи заготовок в рабочую зону пресса | 1971 |
|
SU401092A1 |
| СТАНОК ДЛЯ ОБРАБОТКИ СЛОЖНЫХ ПОВЕРХНОСТЕЙВ ПЛИТАХ | 1972 |
|
SU358104A1 |
| Планетарный редуктор | 1988 |
|
SU1634897A1 |
| ПОДАЮЩЕЕ УСТРОЙСТВО | 1995 |
|
RU2080953C1 |
Изобретение относится к механической обработке конических поверхностей деталей и может быть использовано при поверхностном пластическом деформировании конических поверхностей. Целью изобретения является повышение качества обработки. Для этого устройство снабжено ползуном, установленным в выполненных в каретке под углом к оси к устройству направляющих и имеющим привод возвратно-поступательного перемещения, выполненный в виде кулачкового механизма, кулачок которого кинематически связан с планетарным редуктором посредством сателлита, а толкатель - жестко с ползуном, при этом инструмент укреплен на ползуне. 4 з.п.ф-лы, 2 ил.
| Расточная головка | 1984 |
|
SU1480972A1 |
