тупательного перемещения перемещает рей- ме, находятся под одновременным конт- ку 33 назад. При следующем повороте ролем, а это обеспечивает правильность
автоматической транспортировки приспособлений-спутников по всей транспортно- накопительной системе, в каком бы пункте останова приспособление-спутник не на.хоФормула изобретения
рейки 33 второй вильчатый захват заводится на палец 24 приспособления-спутника и последний перемещается рейкой 33 на установочную платформу 14, где на направляющих 15 фиксируется парой подпру- 45 дилось- жиненных фиксаторов 16. Одновременно блок датчиков 38 считывает шифр кодировки с набора шунтов приспособления- спутника. Затем производится установка1- Транспортно-накопительная система, на рабочий стол 32 приспособления-спут- содержащая автоматизированный склад, за- ника с заготовкой. Для этого на тележ- 50 грузочные и буферные столы и транспорт- ке 6 поднимается грузоподъемная платфор- ную робототележку с установочными плат- ма 41 и выводит установочную платфор- формами для спутников, оснащенными ме- му 14 из зацепления с первой парой ханизмами фиксации последних, систему фиксирующих пальцев 27 загрузочного стола 5. Тележка 6 перемещается на величину шага направляющих 15 установочной платформы 14. Грузонесущая платформа 41 опускается, базируя установочную платформу по второй паре фиксирующих пальцев 27. При этом блок датчиков 38 снимает
55
автоматического адресования спутников, включающую закрепленные на спутниках копирующие элементы и размещенные на загрузочных и буферных столах считывающие блоки, отличающаяся тем. что, с целью расширения технологических возможностей, транспортная робототележка снабжена меФормула изобретения
спортно-накопительная я автоматизированный и буферные столы и отележку с установочн ля спутников, оснаще фиксации последних
дилось- 1- Транспортно-накопительная система, содержащая автоматизированный склад, за- грузочные и буферные столы и транспорт- ную робототележку с установочными плат- формами для спутников, оснащенными ме- ханизмами фиксации последних, систему
автоматического адресования спутников, включающую закрепленные на спутниках копирующие элементы и размещенные на загрузочных и буферных столах считывающие блоки, отличающаяся тем. что, с целью расширения технологических возможностей, транспортная робототележка снабжена механизмом подъема установочных платформ, выполненных съемными, а каждый из загрузочных и буферных столов выполнен в виде двух параллельно расположенных на стойках по обе стороны трассы робо- тотележки планок, на одной из которых расположен двуплечий рычаг с возможностью поворота от устанавливаемой на стол платформы и несущий считывающий блок с возможностью взаимодействия последнего
с размещенным на платформе спутником.
10 ненными упорами.
3335
8
2. Система по п. 1, отличающаяся тем, что каждая из установочных платформ снабжена по крайней мере двумя параллельно расположенными посадочными местами для спутников, а механизм фиксации последних выполнен в виде размещенных на каждом посадочном месте подпружиненных упоров и установленных на каждом спутнике клинообразных пазов с возможностью взаимодействия с подпружи
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкая производственная система | 1985 |
|
SU1364436A1 |
| Способ автоматической транспортировки и установки на станки приспособлений-спутников | 1985 |
|
SU1423347A1 |
| Гибкий производственный комплекс | 1985 |
|
SU1349970A1 |
| Гибкая производственная система | 1987 |
|
SU1491663A1 |
| Поточно-автоматизированная линия абразивной зачистки отливок | 1990 |
|
SU1824252A1 |
| ТРАНСПОРТНО-НАКОПИТЕЛЬНОЕ УСТРОЙСТВО | 1991 |
|
RU2108222C1 |
| АВТОМАТИЗИРОВАННЫЙ ЗАВОД | 1992 |
|
RU2031768C1 |
| Гибкий производственный модуль | 1987 |
|
SU1419852A1 |
| Перегрузочное устройство | 1987 |
|
SU1504171A1 |
| Устройство для установки приспособлений - спутников | 1984 |
|
SU1237381A1 |
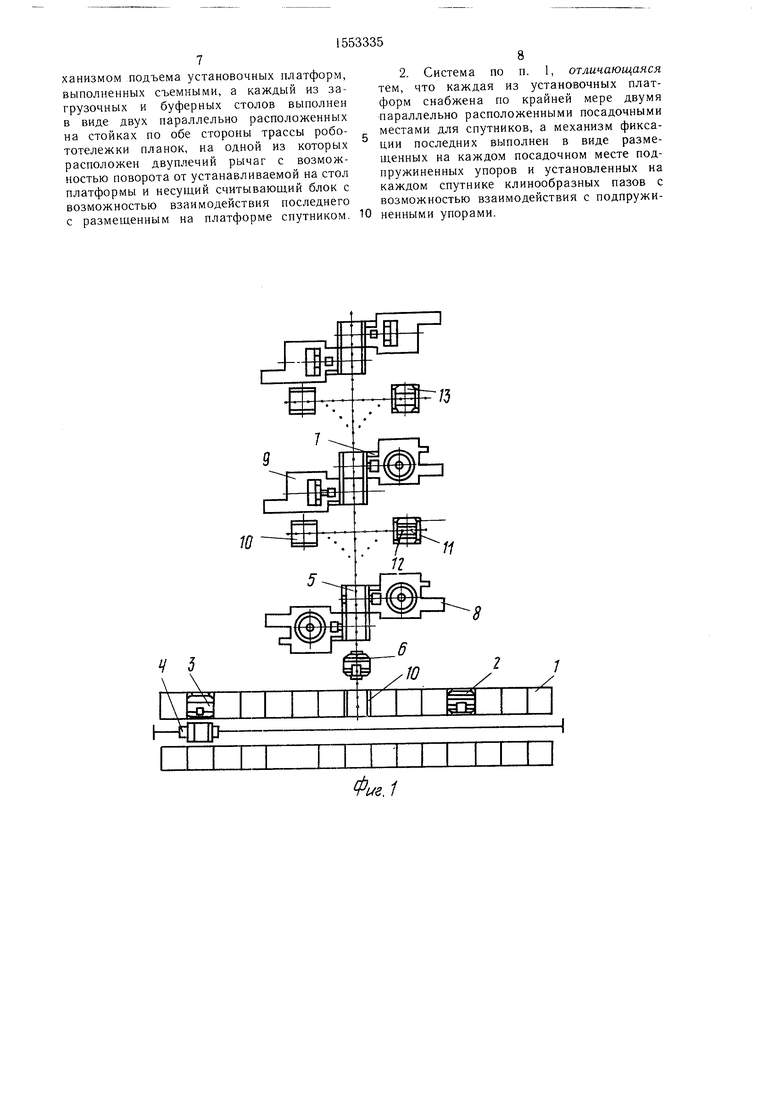
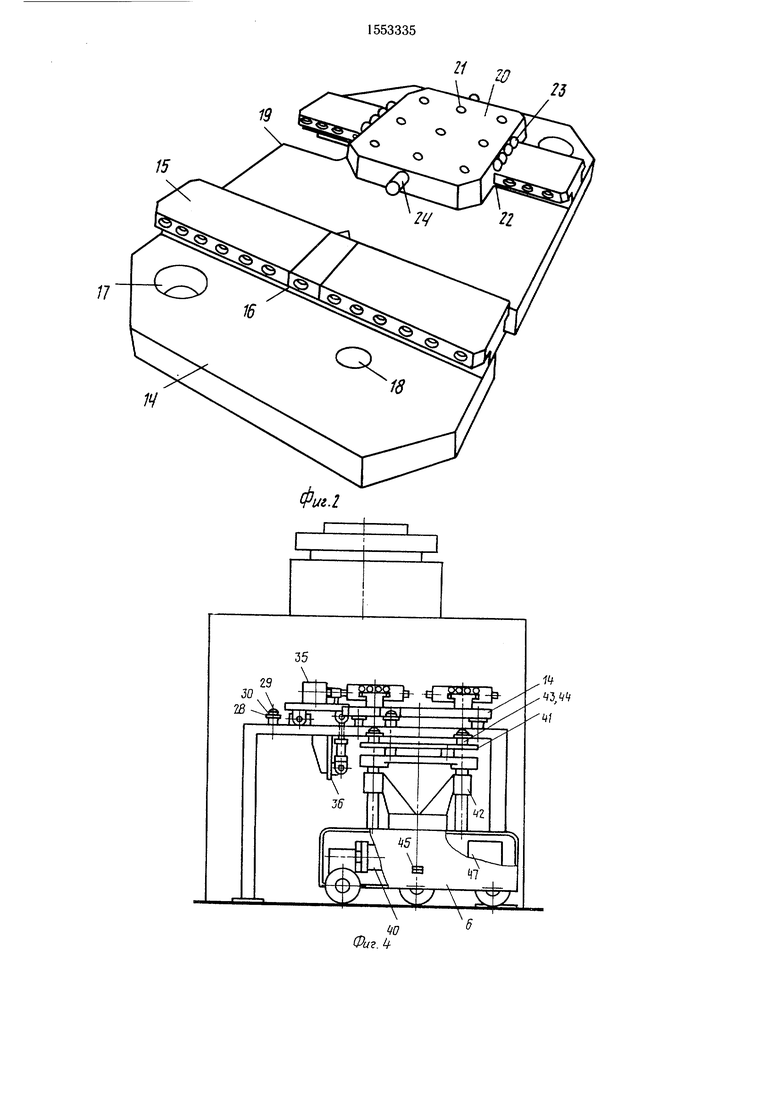
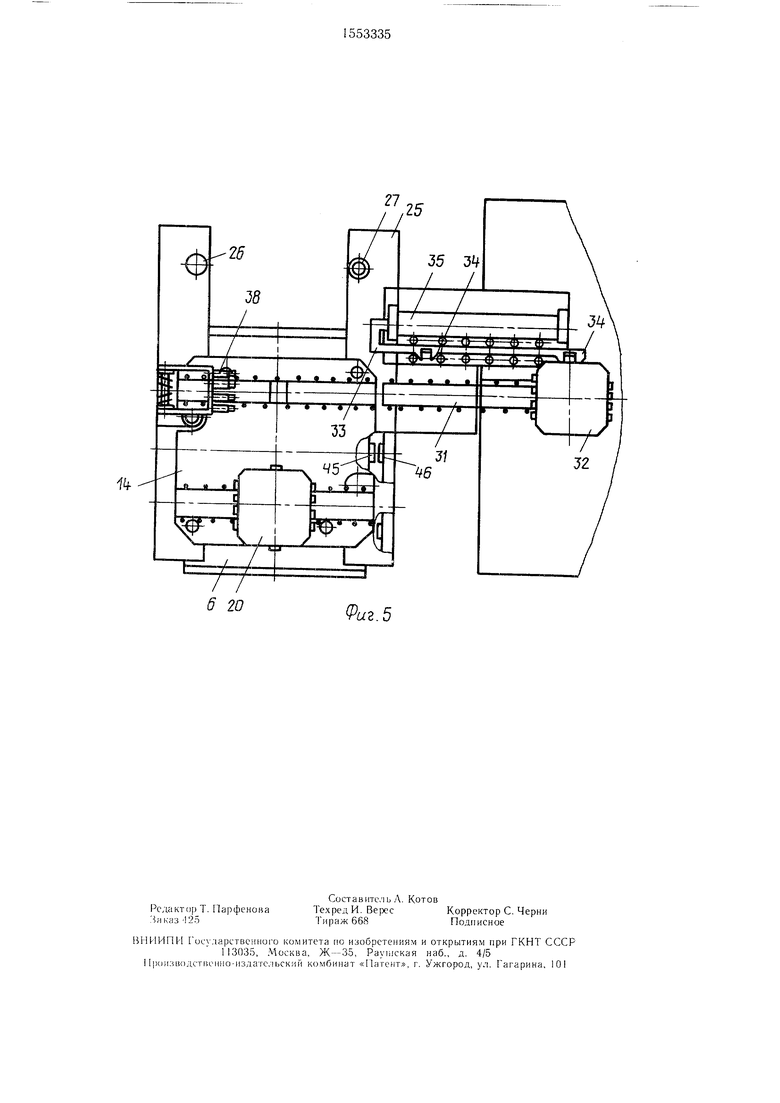
Изобретение относится к области машиностроения. Цель изобретения - расширение технологических возможностей системы - обеспечивается возможностью использования в системе спутников нескольких типоразмеров. Система включает склад хранения заготовок и изделий, транспортную робототележку 6 с подъемной грузонесущей платформой 41, буферные загрузочные и промежуточные столы, а также спутники с элементами кодирования в виде набора шунтов новых конструктивных элементов. При транспортировке и хранении спутники установлены на платформах 14 с параллельными направляющими, расположенными поперек движения тележек 6 и элементами базирования платформы. В состав системы входят дополнительные столы-накопители с резервными порожними платформами. Считывающие блоки датчиков 38, входящие в состав системы автоматического адресования, установлены на столах на большем плече двуплечего рычага 37, меньшее плечо которого имеет упор 39, взаимодействующий с платформой 14 при установке последней на стол, что обеспечивает считывание шифра кодировки непосредственно со спутника. Кроме того, фиксаторы, размещенные на направляющих платформы, обеспечивают крепление спутника при транспортировке. 1 з.п. ф-лы, 5 ил.
Фие.1
19
15
Фиг. Ц(Риг.5
| Белянин П | |||
| Н | |||
| Гибкие производственные комплексы | |||
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
| Питательное приспособление к трепальным машинам для лубовых растений | 1922 |
|
SU201A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
