I Изобретение относится к мапшно строению и может быть использовано лри создании гибких автоматизировак- яык производств.
Цель изобретения - зптрощение конструкции загрузочно-разгрузочных устройств станков за счет обеспечения зыполнения операций устаковки-снятия приспособлений-спутников с (на) под™ донов расположенных на эагрузочно- эазгрузочных устройствах, на (с) ра- эочие органы станков.
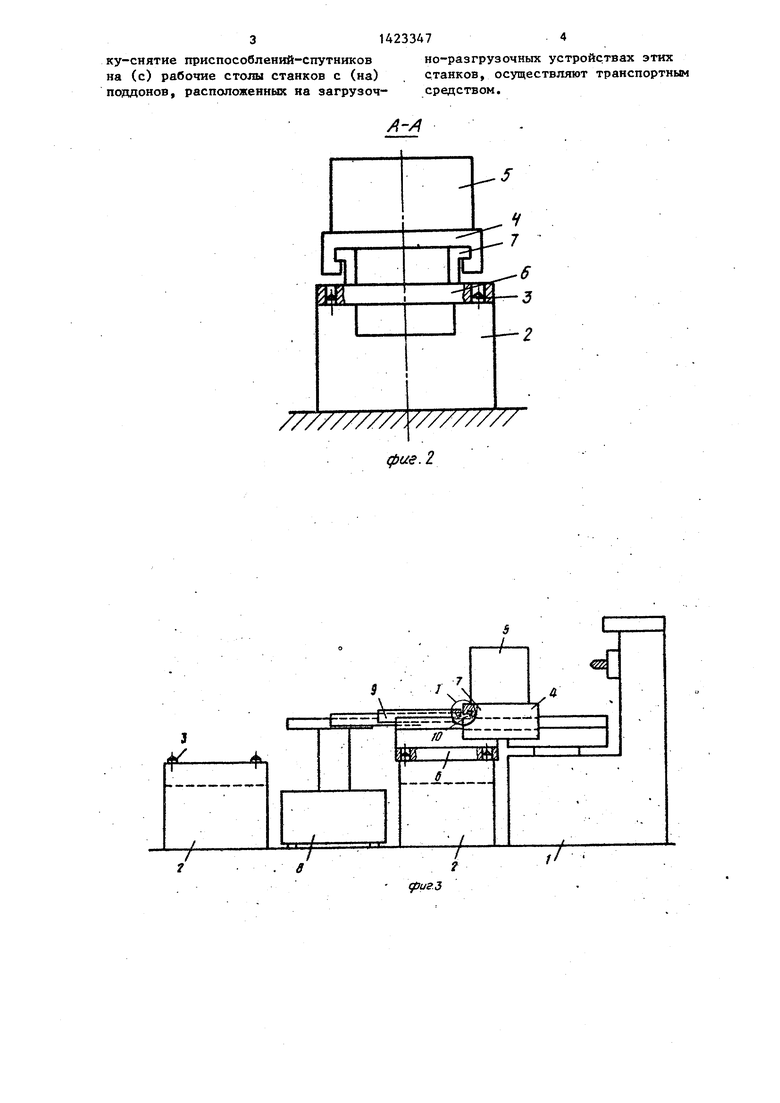
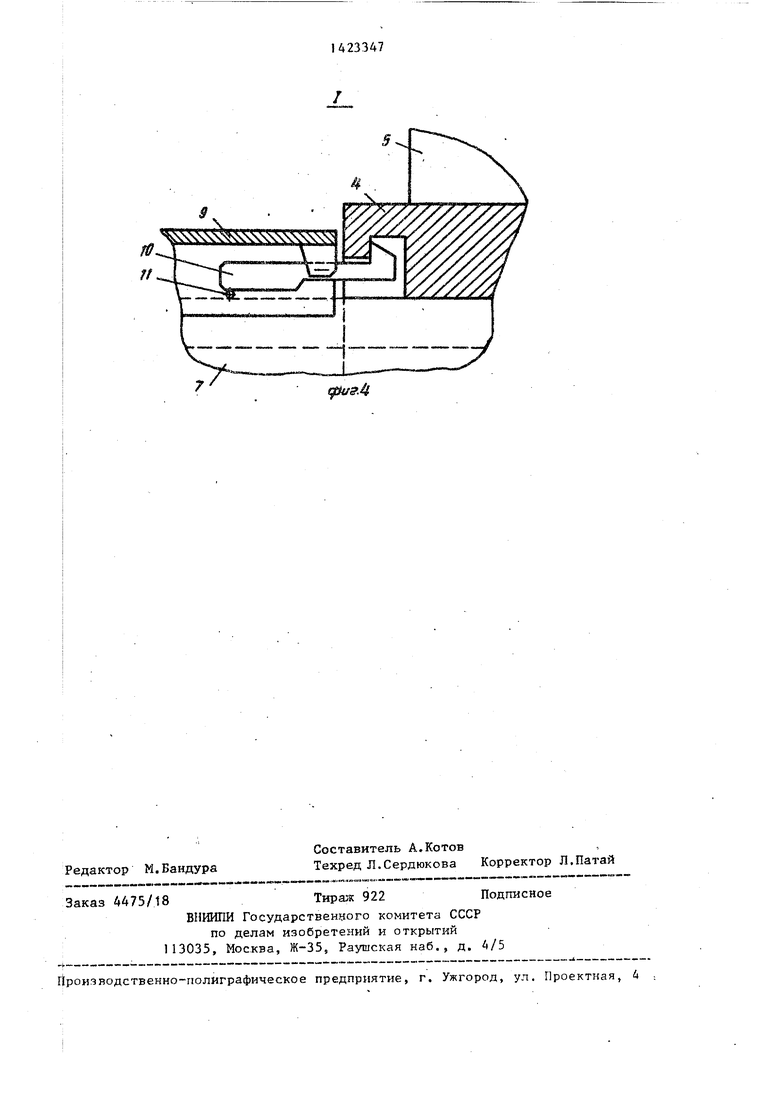
На фиг.1 изображено устройство ,щя автома-гической транспортрфовки л установки на станок спутников на фиг.2 - разрез А-А на фиг„1; на иг,3 - устройство в процессе пере галкивания присдособления-спутника с юдцона на рабочий стол станка (аналогично возврат приспособленйя-спут «пса на поддон) i на фиг,4 - узел 1 sa фиг.З (место сцепления защелки и приспособления-спутника при возврате ИГО с рабочего стола станка на под- ,3SOHj установленный на загрузрчно-раз грузочном устройстве станка).
Устройство для автомати-теской грайспортировки и установки на ста 1JOK присрособлени Исяутншсов содер- ;шт станки 1, оборудованные загрузоч :«О разгрузочными устройствами 2 с ко Ническш-та -штырями 3, комшшкт приспособлений-спутников 4 с закрепленньвет г здеЛЕШми 5., транспортировочные поддоны 6, снабженные направляющими J ент чнымя натнрааггшощнм обслуживае- станка, и отверстиями для точ- Иой фиксации подцоноБ € на устройст- вах 2. Подцоны 6 с установленными на йих приспособлениями-спутнякаки 4 Перемещаются междз станка при помо Вщ транспортной тележки 8, имеющей Грузозахватное устройство, вьтолнен- ное в виде трехсекцнонного телеско пического стола 9, На верхней секции ;стола 9 закреплека защелка 10 и упор 11 для ограничения поворота защелки 10.
Устройство работает следующим образом.
Транспортная тележка 8 берет при помощи телескопического стола 9 под дон 6 со склада. На направляющих 7 поддона б установлено приспособление-спутник 4 с закрепленным изделием 5, Транспортная тележка 8 перемещается по трассе и останавливается напротив свободного 3iarrpy3O4Ho-pa3-
0
5
5
0
5
0
5
грузочного устройства 2 йтанка, закончившего обработку изделия. Телескопический стол 9 выдвигается в направлении устройства 2 и устанавливает на конические штыри 3 поддон 6 со спутником 4. Затем телескопический стол 9 возвращается в исходное положение и поднимается приводом транспортной тележки ,8 вверх на 150-200мк. После этого телескопический стол 9 снова выдвигается вперед и переталкивает спутник 4 с изделием 5 на направляющие рабочего стола станка 1. Телескопический стол 9 опускается ниже с таким расчетом, чтобы защел- , ка 10 вьшша из зацепления со спутником 4, и возвращается в исходное положение. Тележка свободна и может приступить к следующему циклу перегруз- ки.
Съем спутника 4 с рабочего стола станка начинается с выдвижения телескопического стола 9 в направлении станка. При этом защелка 10 отклрня- ется от своего номинального положения, ограниченного упором 11, и входит в зацепление со спутником 4. Телескопический стол 9 возвращается на зад и перетаскивает спутник 4 с рабочего стола станка на направляющие 7 поддона 6, установленного на конические штыри 3 устройства 2. После этого телескопический стол 9 опускается вниз, выводит из зацепления защелку 1C и возвращается в исходное положение, Далее телескопический стол опускается на 150-200 мм и при Сле,цующем ходе вперед снимает с конических штырей S устройства 2 поддон б со ; щгтнкком 4 и устанавливает его на транспортную. тележку 8. Тележка 8 отвозит спут ник 4, установленньп на поддоне 6, на склад.
Формула изобретения
Способ автоматической транспорт - ровки и установки на станки приспособлений-спутников, включающий в. себя транспортировку поддонов с приспособлениями-спутниками от склада до загрузочно-разгрузочного устройства станка и их установку ка загрузоч- но-разгрузочные устройства щт помощи транспортного средстза, о т л и- ч ающи.йс я тем, что, с целью уп рощения конструк1ди14 загрузочио-раз- грузочных устройств станков, установ314233А74
ку-снятие приспособлений-спутников но-разгрузочных устройствах этих на (с) рабочие столы станков с (на) станков, осуществляют транспортным поддонов, расположенные на загрузоч- средством.
A-/I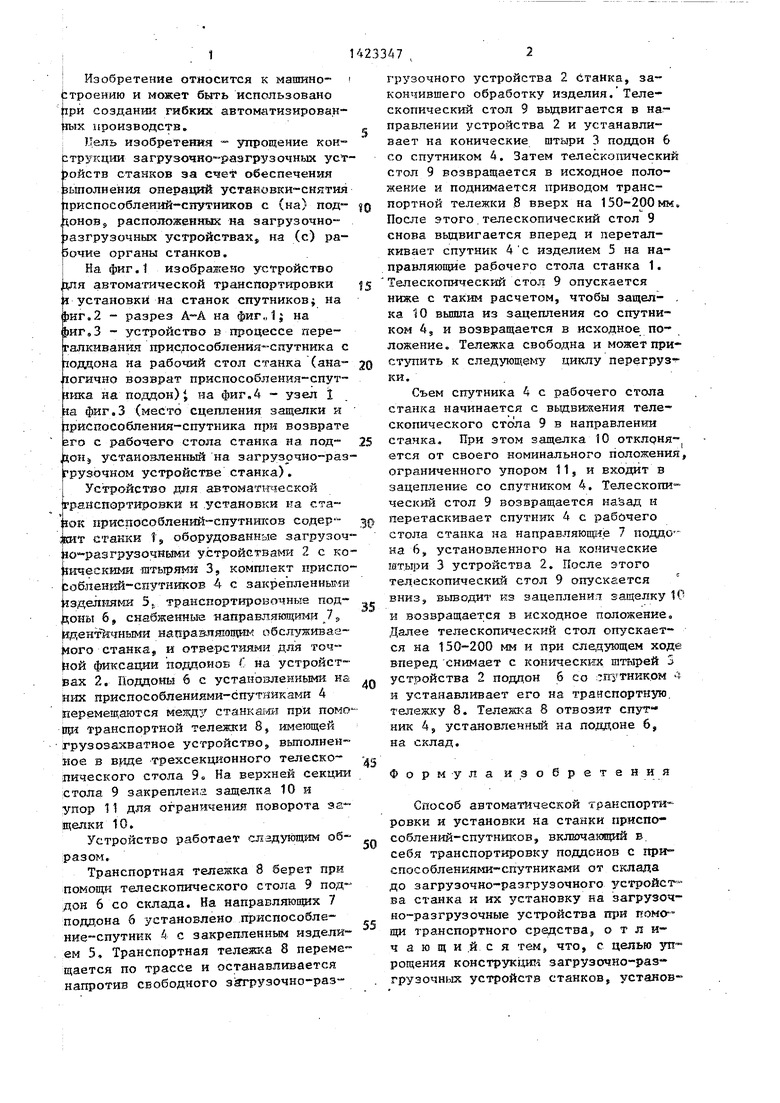
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортно-накопительная система | 1987 |
|
SU1553335A1 |
| Способ разделения деталей от заготовок в автоматической линии | 1984 |
|
SU1348143A1 |
| Гибкий автоматизированный участок | 1986 |
|
SU1542781A1 |
| Гибкая производственная система | 1989 |
|
SU1672704A1 |
| Гибкий производственный комплекс | 1985 |
|
SU1349970A1 |
| Гибкая производственная система | 1985 |
|
SU1364436A1 |
| Устройство подачи приспособлений-спутников | 1989 |
|
SU1641581A1 |
| АВТОМАТИЗИРОВАННЫЙ ЗАВОД | 1992 |
|
RU2031768C1 |
| Устройство для смены,фиксации и зажима приспособлений-спутников | 1980 |
|
SU867604A1 |
| Автоматическая линия | 1986 |
|
SU1425050A1 |
Изобретение относится к машиностроению и может быть использовано при создании гибких автоматизированных производств. Цель изобретения - упрощение конструкции загрузочно- разгрузочных устройств станков за счет обеспечения выполнения операций установки приспособлений-спутников 4 с поддонов 6, расположенных на загрузочно-разгрузочных устройствах 2, на рабочие столы станков 1. Поддон 6 с приспособлением-спутником 4 сначала устанавливают на загрузочно-разгрузочное устройство 2 грузозахватным устройством транспортной тележки 8, а затем этим же грузозахватным устройством приспособление- спутник 4 переталкивают на рабочий стол станка 1. 4 йл. ш О) С Ч to со 00 i4 ц.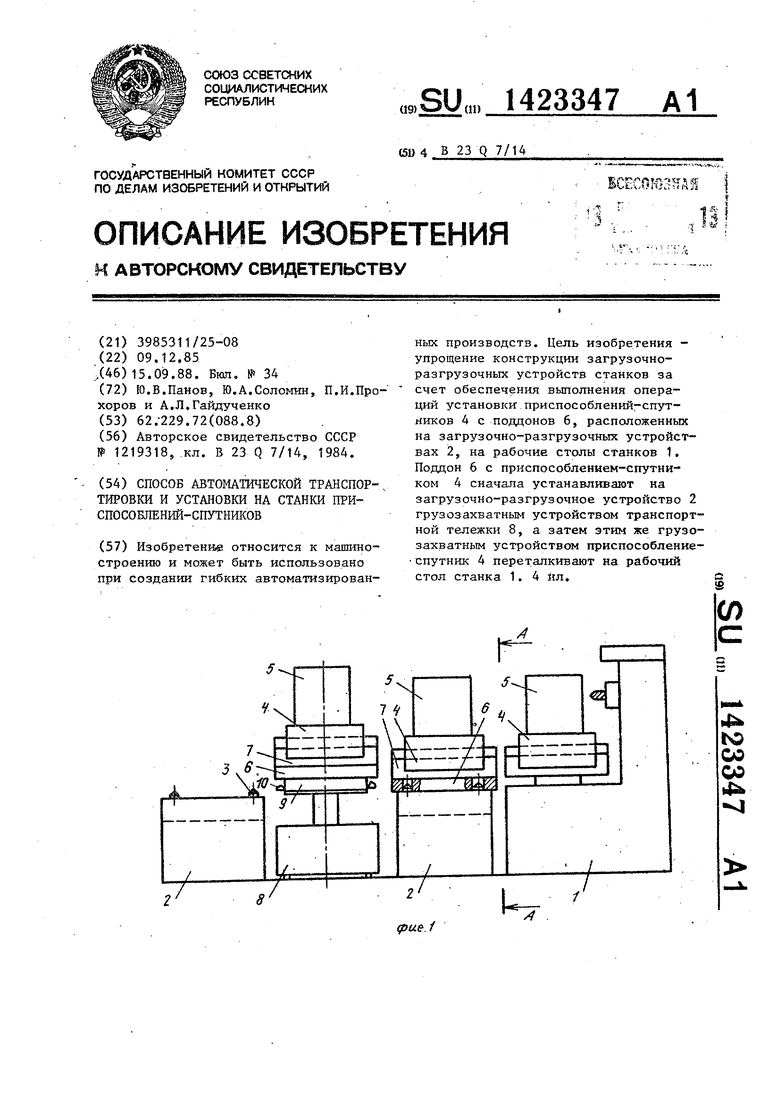
/////////Л V/////// фи$.2
fff.
п.
| Транспортно-накопительная система | 1984 |
|
SU1219318A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
