Изобретение относится к области машиностроения, в частности к гибким производственным системам (ГПС) и может быть использовано для приема и вьщачи столов-спутников с деталями.
Цель изобретения - повышение удобства эксплуатации устройства.
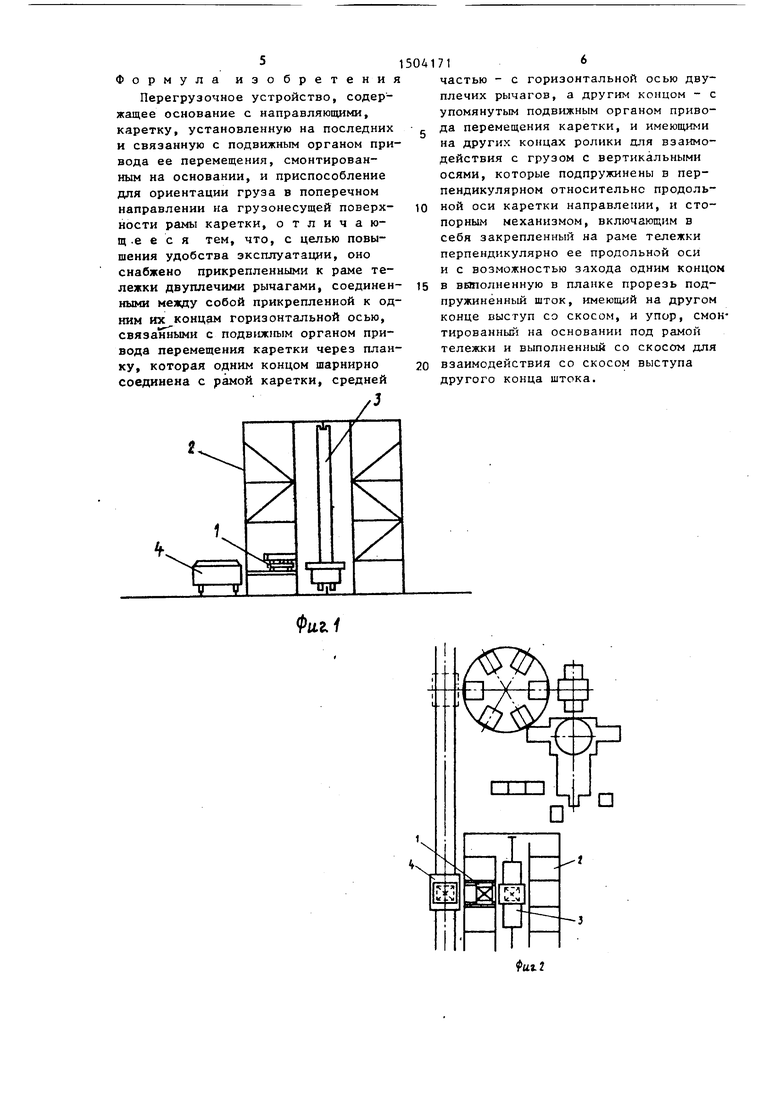
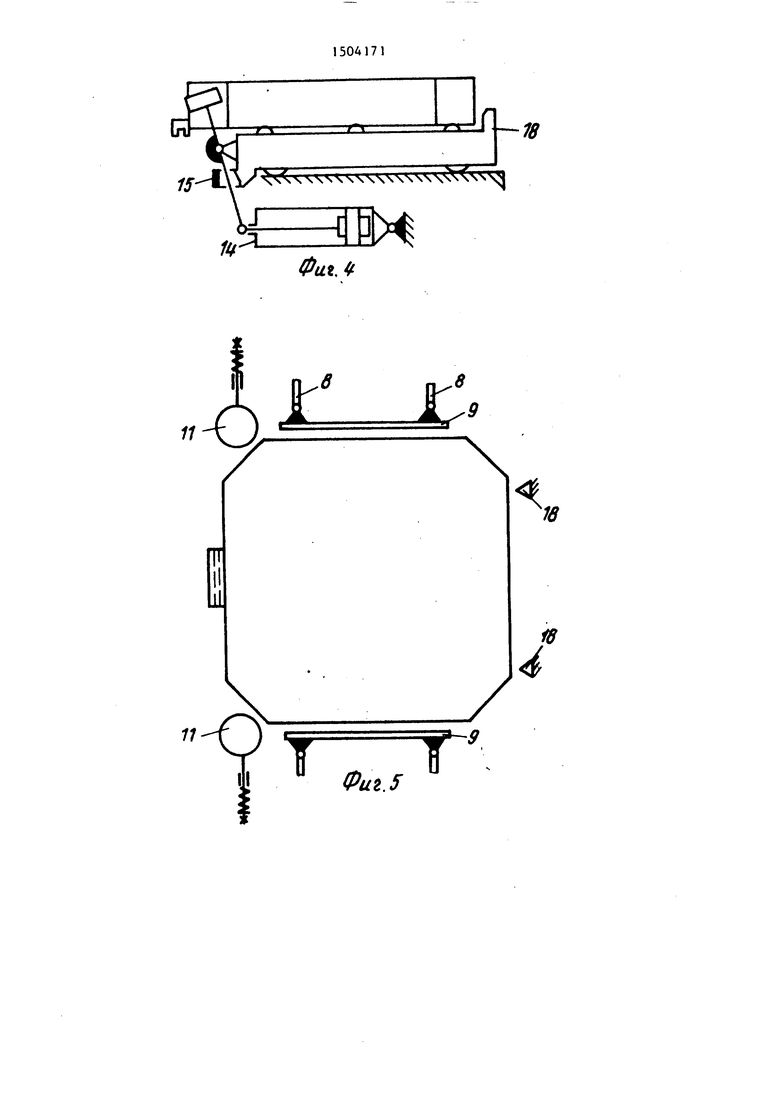
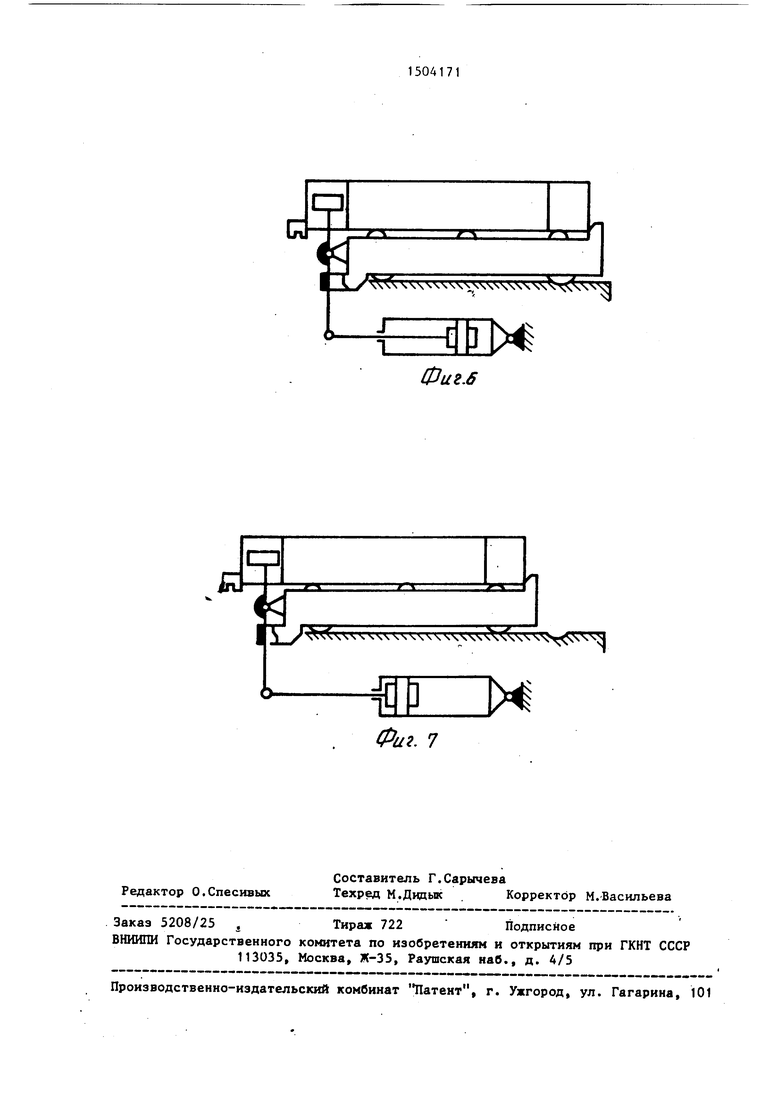
На фиг. 1 представлен общий вид автоматизированной транспортной складской системы; на фиг. 2 - то же, в плане; на фиг. 3 - общий вид перегрузочного устройства (в изомет- рии)V на фиг. 4 - подвижная платформа с установленным на нее столом-спутни- ком; на фиг. 5 - то же, вид в плане; на фиг. 6 - подвижная платформа со сбазированным и расфиксированным на ней столом-спутником на фиг. 7 - то же, вьивинутые приводом осевого перемещения на позицию перегрузки с подвижной платформы на робокар.
Перегрузочное устройство 1 в автоматизированной транспортно-складской системе расположено в одной из ячеек 2 склада, оснащенного краном- штабелером 3 и робокаром 4.
Перегрузочное устройство 1 содержит установленную в направляющих рамы 5 подвижную платформу 6 с закреп- ленными на ее боковых сторонах по два пневмоцилиндра 7 приводного приспособления для ориентации груза в поперечном направлении, штоки 8 которых попарно соедине ны планками 9. На передней стенке подвижной платформы 6 установлены два двуплечих рычага 10. Верхние плечи рычагов 10 снабжены подпружиненными роликами 11 а нижние связанны между собой, штангой 12 и через рычаг 13 шарнирно соединены со штоком пневмоцилиндра 14 привода осевого перемещения. В кронштейне 15 подвижной платформы 6 установлен подпружиненный стопор 16, взаимодействующий одним концом с пазом, выполненным в рычаге 13, а другим - с упором 17, закрепленным на раме 5. На задней стенке подвижной платформы 6 установлены жесткие упоры 18.
Перегрузочное ycTpoiicTBO работает следующим образом.
Столы-спутники 19 станков, хранящиеся на складе 2, подаются краном- штабелером 3 на перегрузочное устройство 1. После установки краном-штабе- лером 3 стола-спутника 19 на подвижную платформу 6 включаются пневмоци- линдры 7 привода поперечного перемещения. Посредством прижимных планок 9 стол-спутник 19 выставляется соос- но грузозахвата робокара 4. После чего включается пневмоцилиндр 14 привода осевого перемещения.
Б начальный момент под воздействием щтока пневмоцилиндра 14 на рычат 13 происходит поворот последнего, а соответственно посредством штанги 12 и поворот рычагов 10 с подпружиненными роликами 11 до упора рычага 13 в кронштейн 15. Ролики 11 взаимодействуя со скосами стола-спутника 10, прижмут стол-спутник 19 к жестким упорам 18, выставив его в осевом направлении.
Дальнейшее перемещение штока пневмоцилиндра 14 обеспечивает перемещение подвижной платформы 6 в направляющих рамы 5 влево в зону работы робокара 4. При зтом подпружиненный стопор 16 выйдет из контакта с упоро 17 и войдет в паз рь.чага 13, зафиксировав рычаги 10, а соответственно и стол-спутник в соориентированном положении. Робокар 4 грузозахватом стаскивает стол-спутник 19, который скосами отжимает подпружиненные прижимные ролики 11. Далее робокар 4 передает стол-спутник 19 на станок, а при необходимости забирает со станка стол-спутник с обработанной деталью и передает на перегрузочное устройство 1.
При передаче стола-спутника 19 в зону работы крана-штабелера 3 шток цилиндра 14 осевого перемещения тянет за рьр4аг Незафиксированный стопором 16, перемещая подвижную платформу 6 со столом-спутником 19 вправ В -конце хода платформы 6 от взаимодействия подпружиненного стопора 16 с упором 17, произойдет расфиксация рычага 13, его поворот, а соответственно пос.едством стержня 12 и поворот рычагов 10 с подпружиненными роликами 11. Штоки пневмоцилиндров 7 поперечногЬ перемещения отводят прижимные планки 9. Кран-штабелер 3 забирает стол-спутиик 19 с подвижной платформы 6 и устанавливает его в ячейку 2 склада. Для предотвращения перемещения стола-спутника 19-после ствоДа планок 9 и подпружиненных роликов 11 нaпpaвJiяющиe рамы 5 выполнены с уклоном в сторону крана-штабелера.
5
Формула изобретени
Перегрузочное устройство, содержащее основание с направляющими, каретку, установленную на последних и связанную с подвижным органом привода ее перемещения, смонтированным на основании, и приспособление для ориентации груза в поперечном направлении на грузонесущей поверхности рамы каретки, отличаю- щ .е е с я тем, что, с целью повышения удобства эксплуатации, оно снабжено прикрепленными к раме тележки двуплечими рычагами, соединенными между собой прикрепленной к одним их концам горизонтальной осью, связанными с подвижным органом привода перемещения каретки через планку, которая одним концом шарнирно соединена с рамой каретки, средней
3
5041716
частью - с горизонтальной осью двуплечих рычагов, а другим концом - с упомянутым подвижным органом приво с да перемещения каретки, и имеющими на других концах ролики для взаимодействия с грузом с вертикальными осями, которые подпружинены в перпендикулярном относительно продоль10 ной оси каретки направлении, и стопорным механизмом, включающим в себя закрепленный на раме тележки перпендикулярно ее продольной оси и с возможностью захода одним концом
15 в внполненную в планке прорезь подпружиненный шток, имеющий на другом конце выступ со скосом, и упор, смонтированный на основании под рамой тележки и выполненный со скосом для
20 взаимодействия со скосом выступа другого конца штока.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Перегрузочное устройство стеллажного склада | 1982 |
|
SU1068352A1 |
| Устройство для перегрузки пакетированных грузов | 1988 |
|
SU1643340A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1532149A1 |
| Комплекс для штамповки деталей из полосового и ленточного материала | 1983 |
|
SU1199379A1 |
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1985 |
|
SU1306852A1 |
| Устройство для загрузки и разгруз-Ки СТЕллАжЕй | 1979 |
|
SU812680A1 |
| Гибкая производственная система | 1989 |
|
SU1672704A1 |
| Автоматизированный склад для хранения штучных грузов | 1983 |
|
SU1152890A1 |
Изобретение относится к машиностроению, а именно к гибким производственным системам, и служит для приема и выдачи столов - спутников с деталями. Цель изобретения - повышение удобства эксплуатации. Перегрузочное устройство включает подвижную платформу 6 с механизмом фиксации стола - спутника 19, на боковых сторонах которой установлены цилиндры 7 привода поперечного перемещения с встречно направленными штоками 8. Привод 14 осевого перемещения снабжен двумя шарнирно закрепленными на платформе 6 двуплечими рычагами 13. Механизм фиксации выполнен в виде подпружиненного стопора 16, размещенного в кронштейне 15 с возможностью взаимодействия одним концом с пазом рычага 13, а другим с неподвижным упором 17. 7 ил.
Фи.г.1
rSNN N NX NNNXNNN xNNNNN
ФигЛ
11
t
IT
II
ll
n
I.I
Фиг. 5
Ч
4
id
Редактор О.Спесивых
Составитель Г.Сарычева
Техред М.Двдык Корректор М.Васильева
Заказ 5208/25
Тираж 722
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва Ж-35, Раушская наб., д. 4/5
г л
Л f
ue.ff
N
Фи2. 7
Подписное
| Бункер для сыпучих материалов | 1986 |
|
SU1310305A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
