СП СЛ
&Э
Јь
00
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД УСТРОЙСТВА ТРАНСПОРТИРОВКИ | 1991 |
|
RU2063343C1 |
| Система управления очистным комбайном и скребковым конвейером | 1987 |
|
SU1481397A1 |
| Устройство автоматической защиты калорифера от замораживания | 1988 |
|
SU1555605A1 |
| Устройство для управления и защиты трехфазной реверсивной нагрузки | 1981 |
|
SU1032518A1 |
| УСТРОЙСТВО для ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ГРУППОЙ ДВУХПОЗИЦИОННЫХ ОБЪЕКТОВ | 1973 |
|
SU368704A1 |
| Электропривод роторного экскаватора | 1989 |
|
SU1710675A1 |
| Устройство для автоматического выбора направления движения полок элеваторного стеллажа по кратчайшему пути | 1983 |
|
SU1148825A2 |
| Устройство автоматической защиты калорифера от замораживания | 1978 |
|
SU765604A1 |
| Устройство автоматической защиты калорифера от замораживания | 1982 |
|
SU1038743A2 |
| Электропривод трубопроводной запорной арматуры с устройством для защиты электродвигателя от аварийного режима | 1989 |
|
SU1661903A1 |
Изобретение относится к промышленному транспорту и может быть использовано в погрузочно-разгрузочных системах, где производится передача изделий с одной фиксированной позиции на другую. Цель изобретения - повышение быстродействия. Устройство содержит реверсивный пускатель электродвигателя 1 передаточной тележки, обмотками 9 и 12 и контактами 3 - 8, 10, 13 и 14, датчики предельных положений с контактами 16 - 19, датчик 22 наличия груза с контактами 20 и 21, реле с обмотками 23, 24 и 27 и контактами 25, 26, 28, 29 и 30, 31, кнопочные посты управления с контактами 11, 14 и 32, 33, кнопку "Стоп" 36 и выключатель 37. По достижении тележкой фиксированной позиции размыкающий контакт 18 датчика предельного положения обесточивает обмотку 9 реверсивного пускателя. Тележка останавливается. В процессе выполнения разгрузочно-погрузочной операции, контролируемой датчиком 22 наличия груза, включаются два реле с обмотками 23 и 24. Замыкающий контакт 26 реле с обмоткой 24 с выдержкой времени включает реле с обмоткой 27. Замыкающий контакт 29 последнего подает команду на включение обмотки 12 реверсивного пускателя. Тележка 2 начинает перемещаться на другую позицию. 2 ил.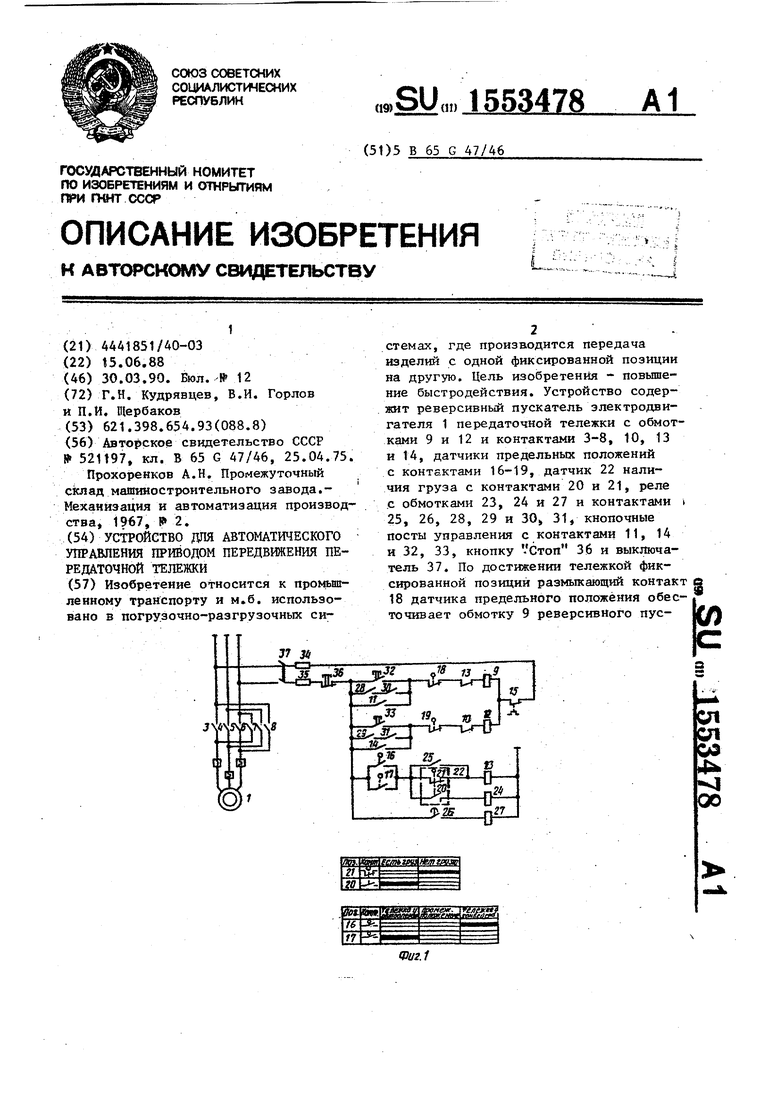
ДЯ.
1Г
тшяш&ттшш
нетгяаё
кателя. Тележка останавливается, В процессе выполнения разгрузочно- погрузочной операции, контролируемой датчиком 22 наличия груза, включаются две реле с обмотками 23 и 24. Замыкающий контакт 26 реле с обмоткой 24
Изобретение относится к промышленному транспорту и может быть использовано в погрузочно разгрузочных системах, где производится передача изделий с одной фиксированной позиции на другую.
Цель изобретения - повышение быстродействия.
На фиг. 1 изображена электрическая принципиальная схема устройства; на фиг. 2 - транспортно-технологичес- кая схема работы передаточной тележки и места установки датчиков.
Устройство содержит электродвигатель 1 тележки 2, в силовую цепь которого включены замыкающие контакты 3-8 реверсивного пускателя, включающего обмотку 9, размыкающий контакт 10, замыкающий контакт 11, обмотку 12, размыкающий контакт 13 и замыкающий контакт 14. В цепи питания обмоток 9 и 12 включен размыкающий тепловой контакт 15. Устройство включает также датчики предельного положения, имеющие замыкающие конакты 16, 17 и размыкающие контакты 18, 19. Замыкающие контакты 16 и 17 соединены между собой параллельно и включены последовательно с замыкающим контактом 20 и размыкающим контактом 21 датчика 22 наличия груза в цепи питания обмоток 23 и 24 реле, каждое из которых имеет замыкающий контакт 25 и размыкающий контакт 26 с выдержкой времени на включение соответственно в цепях питания обмоток 23 и 27 реле. Первое реле содержит замыкающие контакты 28 и 29, а третье - замыкающие контакты 30 и 31, которые соединены последовательно и подключены параллельно замыкающим контактам I1, 14 и 32,33 кнопочных постов управления в цепи питания обмоток 9 и 12 реверсивного пускателя. Цепи питания через предохранители 34 и 35, кнопку Стоп 36 и выключатель 37 подключены к силовым цепям. Тележка 2 перемещается между двумя погрузочно-разгрус выдержкой времени включает реле с обмоткой 27. Замыкающий контакт 29 последнего подает команду на включение обмотки 12 реверсивного пускателя. Тележка начинает перемещаться на другую позицию. 2 ил.
5
0
5
0
5
0
5
0
5
зочными приспособлениями 38 и 39 конвейера и линии гальванопокрытий.
Устройство работает следующим образом.
При движении к погрузочно-разгру- зочному приспособлению 38 конвейера, тележка 2}наезжая своим колесом на датчик предельного положения, размыкающим контактом 18 обесточивает обмотку 9 реверсивного магнитного пускателя, который замыкающими контактами 3-5 в силовой цепи прекращает подачу питания электродвигателю 1. В крайнем положении замыкающий контакт 16 датчика положения замкнут. После того, как обработанный груз снимут, срабатывает датчик 22 наличия груза, который размыкающим контактом 21 за- питывает обмотку 23 реле. Последнее становится на самоблокировку через замыкающий контакт 25. Поставив груз, подлежащий обработке, на тележку 2, датчик 22 наличия груза фиксирует принятие груза замыкающим контактом 20. В этом случае запитывается обмотка 24 реле, которое замыкающим контактом 26 запитывает обмотку 27 реле, обеспечивая задержку трогания тележки 2 после принятия груза. Последовательно соединенные замыкающие контакты 29 и 31 формируют сигнал на автоматическое перемещение тележки 2 к погруз очно-разгрузочному приспособлению 39 линии гальванопокрытий. При этом размыкающие контакты датчика предельного положения 19 и реверсивного магнитного пускателя 10 замкнуты. Запитывается обмотка 12 магнитного пускателя, который замыкающим контактом 14 шунтирует последовательно соединенные замыкающие контакты 29 и 31, а замыкающими контактами 6-8 подает питание на электродвигатель 1. Тележка 2 движется к погрузочно-разгрузочному приспособлению 39 линии гальванопокрытий. Работа устройства в этом случае аналогична описанной. Кнопочные посты управления с контактами 32, 33 и 36
обеспечивают останов и пуск тележки 2 в промежуточных положениях. Выключатель 37 и предохранители 34 и 35 служат для отключения и защиты цепей управления.
Формула изобретения
Устройство для автоматического управления приводом передвижения пере- даточной тележки, содержащее реле с замыкающими контактами, датчики предельных положений, замыкающие контакты которых соединены паралелльно, а размыкающие включены последователь- но с замыкающими контактами кнопочных постов управления и размыкающими контактами взаимной блокировки реверсивного пускателя электродвигателя передаточной тележки в цепях питания его обмоток, датчик наличия груза с размыкающим контактом и замыкающим, включенным в цепь питания обмотки одного
3816
1Ы
из реле, в цепь питания обмотки другого реле включен один из его замыкающих контактов, отличающееся тем, что, с целью повышения быстродействия, реверсивный пускатель снабжен замыкающими контактами, а замыкающий контакт первого реле выполнен с задержкой времени и включен в цепь питания обмотки третьего реле, замыкающие контакты датчиков предельных положений включены в цепи питания обмоток первого и второго реле, другие замыкающие контакты второго реле и замыкающие контакты третьего реле соединены последовательно и подключены с замыкающими контактами реверсивного пускателя параллельно замыкающим контактам кнопочных постов управления, размыкающий контакт датчика наличия груза подключен параллельно первому замыкающему контакту второго реле.
ип
,J7J5
Фиг.2
| Устройство для точного адресования передаточной тележки | 1975 |
|
SU521197A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Прохоренков А.Н | |||
| Промежуточный склад машиностроительного завода,- Механиэация и автоматизация производства, 1967, R 2. | |||
