(54) УСТРОЙСТВО ДЛЯ ТОЧНОГО АДРЕСОВАНИЯ ПЕРЕДАТОЧНОЙ
ТЕЛЕЖКИ
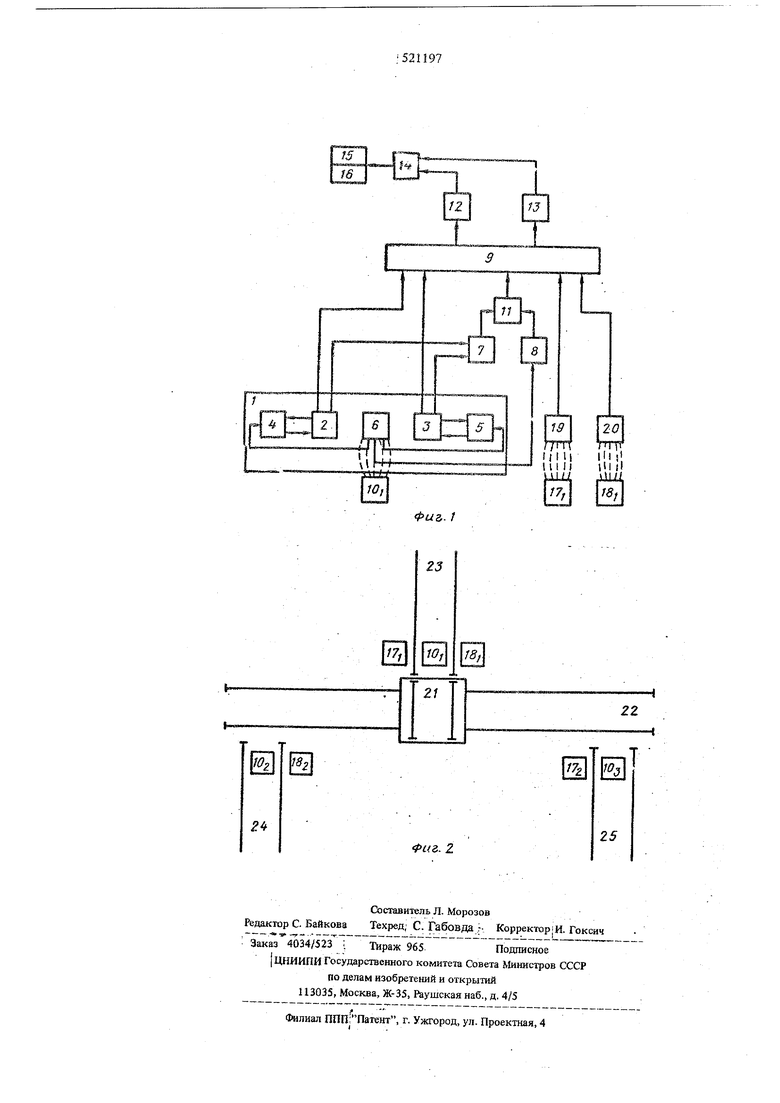
Устройство содержит блок реализааип останова фиг. Г) с датчиками 2 и 3 реверса, .амн -i н : амяти и датчиком 6 отключения, элемент ИЛИ 7, лок 8 задержки, коммутатор 9, формирователи коанд ма останов 1,0,( - 10 J , переключающий триггер: 1, усилители 12 и 13 мощности, блок 14 програмною пуска, двигатель 15 тележки с тормозом 16, ормирователи команд на отправлеш{е 17 , Г/ и 18 , . 18 , датчики 19 и 20 отправления. Все упомянутые элементы и блоки, за исключением форладроателей команд на останов и формирователей команд на огаравлеш{е, установлены на пере,цаточной тележке 21 (фиг. 2), которая движется по рельсам 22 и с исходной позидий 23 развозит вагонетки с кирпичом к печам на адресные позидаи 24 и 25. На исходной позиции 23 расположены формирователь команд на останов 10,|Г и формирователи команд на отправление 17 и 181, а на адресных позициях 24 и 25 - соот-ветственно форлдарователи ком;«щ jra otiaisois Ю., и 10 5 , фop шpoвaтeли команд на ищравление 18 и 17 „ (с позиций 24, 25 тележка 21 двигается только к позиции 23, т. е. всегда в OJIVSOM и гом же налравлепии для каждой адресной иозпцш),
Работу устройства можно рассмогреть при движеiffiH тележки 21 с исходной позиции 23 к адресной позиции 25. Формирователь команд 18 , подает команду на датчик 20 и через первьш кзмяп коммутатора 9, в котором команда датшка 20 з;то.:глнается, и усилитель 13 включает блок 14. Двигатель 1.5 кабирает скорость. На максимальной скоросги тележка 21 иод,чо- . дит к позиции 25. При этом от формгфователя команд 10 , сбрасьшает датчик 3, кот(;;рый через элемент ИЛИ
у
1 и триггер 11 воздействуегкя; коммутатор 9, Коммутатор 9 переключается с неркого канала на второй и тем самым переводит схему в режим топгого останова, при этом память комагщ.ы датшп-са 20 в первом канале коммутатора 9 стирается . .Двигатель 15 продол-: жает получать питакие через опок 14, усвтвггель 13 и второй канал коммутатора 9 в соответствии с командой датчика 3, которая запоминается блоком 5. При дальнейшем движении телелжи 21 ох фор шрователя команд 10 3 сбрасывает датчик б, который подает команду на блок 8 и снимает гшг/шть команды датвдка 3, воздействуя на блок 5. Поэтому двигатель 15 отключается, а тормоз 16 включается, как только датчик 3 выйдет из зоны действия форм1 рователя команд 10 5 на позиции 25. Однако телелака 21, кото- ; рая двигалась с максимальной скоростью, по инер дии продолжаетдвижение.При этом уже датшк 2 входит § зону действия формнровагеля комагед Ю, на позиции 25, сбрасывает и яодает команду на аключеш1е двигателя 15 в обратном ааправлешм через второй канал комь сутатора 9, усаяитедь 12 и блок 14.
при движении но инерздш датчгж 2 кроскакнвает зону действия формирователя команд 10 . на позиции 25, то его команду заиолашает блок 4, гак как датчик 6, который сгшмает .ггу паглятн, вы,ходит из зоны действия этого фop шpoвaгeлfi колганд
10 j раньше, чем датчик 2. Двигатель 15 тормозится v :;чшключгиием и нэшнает вращение а протиеогкх к.жном направлении; набирая скорость но команде блока 14. Программа пуска двигателя 15 выбрана такой, чтобы на участке выбета после максимальной скорости двигатель 15 не успел разогнатася до максимальной скорости. В результате этого тележка 21 подойдет к месту требуемого останова с другой стороны
и на меньшей скоросга. Происходит процесс, описанHbrif выше, с той лишь разницей, что из датчиков ре- ; верса первым срабатьюает датчшс 2 и по его команде Tj Mrrep 11 не будет переключать коммутатор 9 с первого канала на второй, так как это переключе1Ше уже произошгю после описанного срабатьшания датчика 3. . Затухающие колебатдая движения тележки 21 около , I места требуемого останова будут происходить дотех I пор, пока тележка 2J. не подойдет к месту останова на нижней ступеш-i скорости (на npai-стике достаточно о;ию1о-полугора периодов). Нижняя стунеиъ скорости выбирается такой, на которой при отключении двигате.ля 15 тормоз 1 б обеспешшает останов тележки 21 с необходатмой точностью. После окогмания тощо-; го останова блок 8, который полуши команду при лервом срабатывании датчика 6, воздействует на . триггер 11J и последний переключает коммутатор 9 со второго канала на первый, т. е. из ре. точного останова - в обычный режим. Процесс останова у позиций 23 и 24 аналогичен описанному вьпие, только в зависимости от того, с какой стороны подходит тележка 21 к месту останова, из датчиков реверса пер|вым срабатьюает даттек 2 или 3.
Формула изобретения
Устройство для точного адресования передаточной тележки, содержащее коммутатор, соогветствующие входы которого через датшки отправления тележки и беспровод 1ые каналы связи соединены с формирователями комаац на отправлен 1е, а выходы - через усилители мощности и блок программного пуска - с двигателем тележки, снабженным тормозом, формирователь команд на останов, блок реализации останова, элемент ИЛИ, блок задержки, переключающий триггер, отличающееся тем, что, с целью упро-
1щения и повьидения надежности работы, в нем в блок реализации останова введены датчик отключения, датчики реверса и блоки памяти, причем вход датчика отключения соединен беспроводным каналом связи с формирователем команда: на останов, один из вы ходов через блок задержки - с одгшм из входов переключающего триггера, а другие выходы -- со входами блоков памяти, взаимосвязанных с соответствующикда датчиками реверса, одни выходы датчиков реверса через элемент ИЛИ подключены к другому входу переключающего триггера, а другие выходы и выход переключающего триггера - к соответствующим входам коммутатора.
,Ч
I1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для точного адресования передаточной тележки | 1978 |
|
SU747789A1 |
| Устройство для точного адрессования электропередаточной тележки | 1976 |
|
SU596518A1 |
| Устройство программного адресования транспортного средства | 1983 |
|
SU1113337A1 |
| Устройство для адресования транспортного средства | 1987 |
|
SU1618706A1 |
| Устройство для управления движением транспортного средства | 1986 |
|
SU1317401A1 |
| Устройство для управления движением транспортного средства | 1989 |
|
SU1735809A2 |
| Устройство для управления автоматическими транспортными средствами | 1983 |
|
SU1101841A1 |
| Система автоматического управления транспортным средством по трассе-ориентиру | 1988 |
|
SU1543524A1 |
| Устройство последовательного считывания информации и точного позиционирования | 1987 |
|
SU1475875A1 |
| Устройство для автоматического адресования объекта | 1975 |
|
SU640915A1 |
Фи,. /
