р.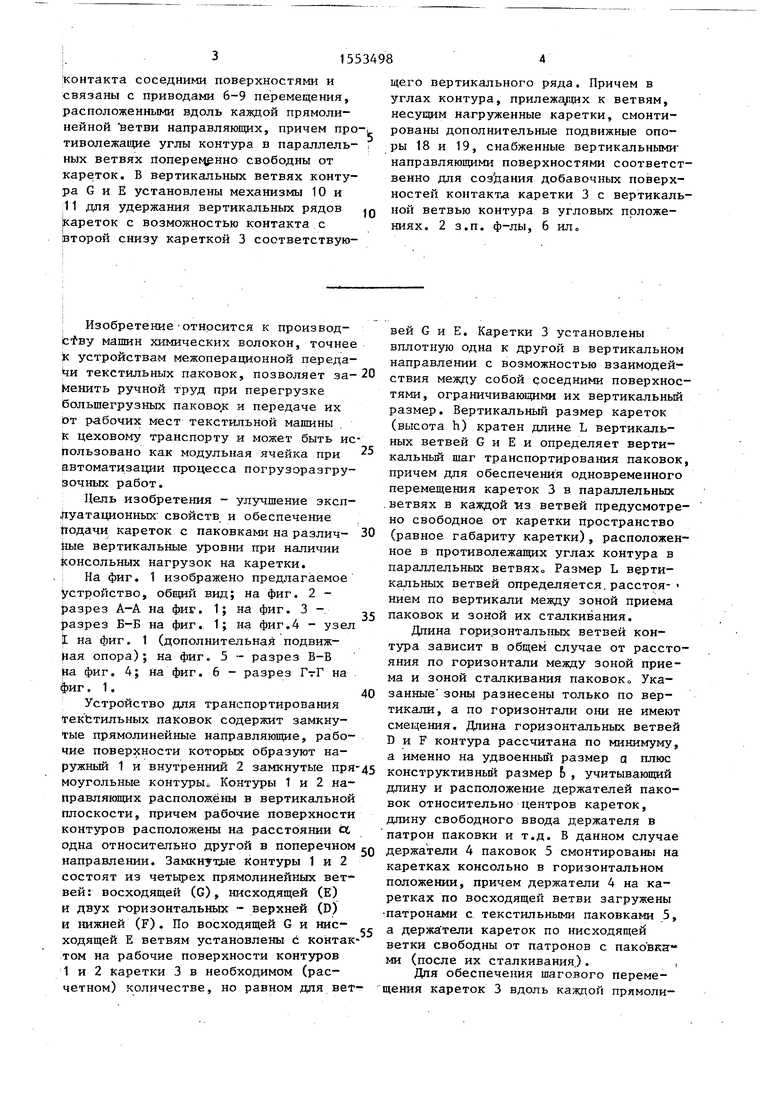
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ориентированной установки паковок с веретен текстильной машины | 1975 |
|
SU585243A1 |
| Устройство для перегрузки паковок | 1990 |
|
SU1710475A1 |
| Устройство для приема с намоточной машины и перегрузки наработанных паковок на транспортные средства | 1983 |
|
SU1105434A1 |
| Механизм съема паковок с мотальных машин с двухместными паковкодержателями | 1981 |
|
SU1011482A1 |
| Устройство для транспортирования текстильных паковок | 1986 |
|
SU1308539A1 |
| Устройство для приема наработанных паковок с намоточной машины и перегрузки их на транспортные средства | 1985 |
|
SU1326531A1 |
| Устройство для межоперационной передачи паковок текстильных машин | 1979 |
|
SU912618A1 |
| Механизм перегрузки паковок | 1991 |
|
SU1779234A3 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА ПАКОВОК С ТРАНСПОРТЕРА И ПЕРЕГРУЗКИ ИХ НА ТРАНСПОРТНЫЙ МОДУЛЬ | 1992 |
|
RU2036830C1 |
| Устройство для межоперационной передачи паковок текстильных машин | 1981 |
|
SU986845A2 |


Изобретение относится к производству машин химических волокон, точнее к устройствам обслуживания машин химических волокон путем межоперационной передачи текстильных паковок. Цель изобретения - улучшение эксплуатационных свойств и обеспечение механизированной подачи кареток с паковками на различные вертикальные уровни. Устройство содержит замкнутые прямолинейные направляющие DEFG, выполненные в виде двух прямоугольных контуров 1 и 2 - наружного и внутреннего соответственно, расположенных в вертикальной плоскости. На рабочих поверхностях направляющих установлены каретки 3, оснащенные держателями 4 текстильных паковок 5. Каретки имеют возможность контакта соседними поверхностями и связаны с приводами перемещения 6, 7, 8 и 9, расположенными вдоль каждой прямолинейной ветви направляющих, причем противолежащие углы контура в параллельных ветвях попеременно свободны от кареток. В вертикальных ветвях контура G и E установлены механизмы 10 и 11 для удержания вертикальных рядов кареток с возможностью контакта со второй снизу кареткой 3 соответствующего вертикального ряда. Причем в углах контура, прилежащих к ветвям, несущим нагруженные каретки, смонтированы дополнительные подвижные опоры 18 и 19, снабженные вертикальными направляющими поверхностями соответственно для создания добавочных поверхностей контакта каретки 3 с вертикальной ветвью контура в угловых положениях. 2 з.п. ф-лы, 6 ил.
s
13
Ј
V
ffii/г/
контакта соседними поверхностями и связаны с приводами 6-9 перемещения, расположенными вдоль каждой прямолинейной ветви направляющих, причем противолежащие углы контура в параллельных ветвях Попеременно свободны от кареток. В вертикальных ветвях контура G и Е установлены механизмы 10 и 11 для удержания вертикальных рядов J Ьсареток с возможностью контакта с второй снизу кареткой 3 соответствую
Изобретение относится к производству машин химических волокон, точнее |к устройствам межоперационной передачи текстильных паковок, позволяет за- Менять ручной труд при перегрузке большегрузных паковок и передаче их 0т рабочих мест текстильной машины к цеховому транспорту и может быть ис- рользовано как модульная ячейка при автоматизации процесса погрузоразгру- рочных работ.
Цель изобретения - улучшение эксп- .Ггуатационных свойств и обеспечение Подачи кареток с паковками на различные вертикальные уровни при наличии Консольных нагрузок на каретки.
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг.4 - узел t на фиг. 1 (дополнительная подвиж- Ная опора); на фиг. 5 - разрез В-В На фиг. 4; на фиг. 6 - разрез ГгГ на фиг. 1.
Устройство для транспортирования текстильных паковок содержит замкнутые прямолинейные направляющие, рабочие поверхности которых образуют наружный 1 и внутренний 2 замкнутые пря моугольные контуры. Контуры 1 и 2 направляющих расположены в вертикальной плоскости, причем рабочие поверхности контуров расположены на расстоянии ct одна относительно другой в поперечном направлении. Замкнутее Контуры 1 и 2 состоят из четырех прямолинейных ветвей: восходящей (G), нисходящей (Е) и двух горизонтальных - верхней (D) и нижней (F). По восходящей G и нисходящей Е ветвям установлены с контактом на рабочие поверхности контуров 1 и 2 каретки 3 в необходимом (расчетном) количестве, но равном для вет
щего вертикального ряда. Причем в углах контура, прилежащих к ветвям, несущим нагруженные каретки, смонтированы дополнительные подвижные опоры 18 и 19, снабженные вертикальными направляющими поверхностями соответственно для создания добавочных поверхностей контакта каретки 3 с вертикальной ветвью контура в угловых положениях. 2 з.п. ф-лы, 6 ил о
0
35
0 5
д5 CQ 40
55
вей G и Е. Каретки 3 установлены вплотную одна к другой в вертикальном направлении с возможностью взаимодействия между собой соседними поверхностями, ограничивающими их вертикальный размер. Вертикальный размер кареток (высота h) кратен длине L вертикальных ветвей G и Е и определяет вертикальный шаг транспортирования паковок, причем для обеспечения одновременного перемещения кареток 3 в параллельных ветвях в каждой из ветвей предусмотрено свободное от каретки пространство (равное габариту каретки), расположенное в противолежащих углах контура в параллельных ветвях Размер L вертикальных ветвей определяется расстоя- нием по вертикали между зоной приема паковок и зоной их сталкивания.
Длина горизонтальных ветвей контура зависит в общем случае от расстояния по горизонтали между зоной приема и зоной сталкивания паковок. Указанные зоны разнесены только по вертикали, а по горизонтали они не имеют смещения. Длина горизонтальных ветвей D и F контура рассчитана по минимуму, а именно на удвоенный размер а плюс конструктивный размер Ь, учитывающий длину и расположение держателей паковок относительно центров кареток, длину свободного ввода держателя в патрон паковки и т.д. В данном случае держатели 4 паковок 5 смонтированы на каретках консольно в горизонтальном положении, причем держатели 4 на каретках по восходящей ветви загружены патронами с текстильными паковками 5, а держатели кареток по нисходящей ветки свободны от патронов с паковками (после их сталкивания). ,
Для обеспечения шагового перемещения кареток 3 вдоль каждой прямолинейной ветви G, D, Е и F контура устновлен дискретный привод 6, 7, 8 и 9 соответственно.
Вертикальные ветви G и Е снабжены механизмами для удерживания вертикального ряда кареток: механизм 10 в восходявдей ветви G и механизм 11 в нисходящей ветви Е. Удерживающие механизмы в вертикальных ветвях нужны вследствие попеременного отсутствия нижних кареток то в одной, то в другой ветви, при этом остальной ряд вышележащих кареток, начиная с второй снизу, необходимо поддерживать, так как лишь самые нижние каретки в каждом из вертикальных рядов базируются своей массой на направляющих, остальные каретки вертикального ряда опираются на верхние поверхности нижележащих кареток и при отсутствии нижних кареток без удерживаюыих механизмов 10 и 11 упадут под собственно тяжестью.
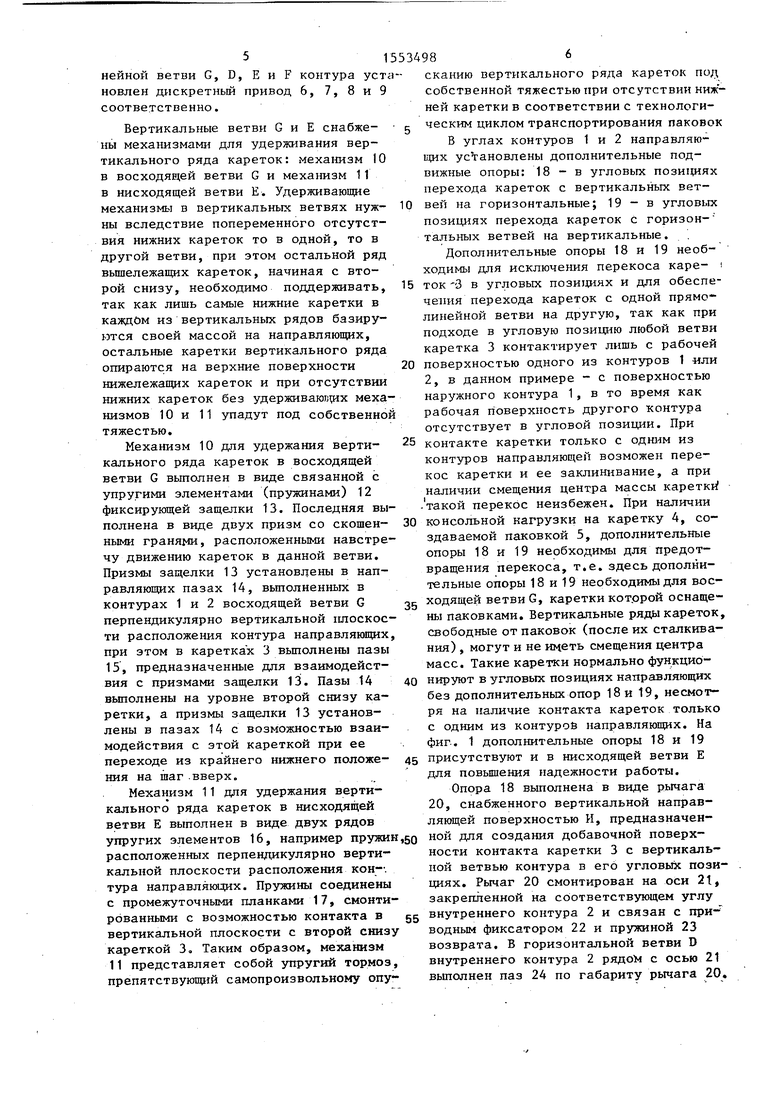
Механизм 10 для удержания вертикального ряда кареток в восходящей ветви G выполнен в виде связанной с упругими элементами (пружинами) 12 фиксирующей защелки 13. Последняя выполнена в виде двух призм со скошенными гранями, расположенными навстречу движению кареток в данной ветви. Призмы защелки 13 установлены в направляющих пазах 14, выполненных в контурах 1 и 2 восходящей ветви G перпендикулярно вертикальной плоскости расположения контура направляющих при этом в каретках 3 выполнены пазы 15, предназначенные для взаимодействия с призмами защелки 13. Пазы 14 выполнены на уровне второй снизу каретки, а призмы защелки 13 установлены в пазах 14 с возможностью взаимодействия с этой кареткой при ее переходе из крайнего нижнего положения на шаг вверх.
Механизм 11 для удержания вертикального ряда кареток в нисходящей ветви Е выполнен в виде двух рядов
упругих элементов 16, например пружинно н°й Для создания добавочной поверхрасположенных перпендикулярно вертикальной плоскости расположения контура направляющих. Пружины соединены с промежуточными планками 17, смонтированными с возможностью контакта в вертикальной плоскости с второй снизу кареткой 3. Таким образом, механизм 11 представляет собой упругий тормоз, препятствующий самопроизвольному опу-
еканию вертикального ряда кареток под собственной тяжестью при отсутствии нижней каретки в соответствии с технологи- . ческим циклом транспортирования паковок
В углах контуров 1 и 2 направляющих установлены дополнительные подвижные опоры: 18 - в угловых позициях перехода кареток с вертикальных вет0 вей на горизонтальные; 19 - в угловых позициях перехода кареток с горизонтальных ветвей на вертикальные.
Дополнительные опоры 18 и 19 необходимы для исключения перекоса каре-
5 ток 3 в угловых позициях и для обеспечения перехода кареток с одной прямолинейной ветви на другую, так как при подходе в угловую позицию любой ветви каретка 3 контактирует лишь с рабочей
0 поверхностью одного из контуров 1 или 2, в данном примере - с поверхностью наружного контура 1, в то время как рабочая поверхность другого контура отсутствует в угловой позиции. При
5 контакте каретки только с одним из контуров направляющей возможен перекос каретки и ее заклинивание, а при наличии смещения центра массы каретки1 - такой перекос неизбежен. При наличии
0 консольной нагрузки на каретку 4, создаваемой паковкой 5, дополнительные опоры 18 и 19 необходимы для предотвращения перекоса, т.е. здесь дополнительные опоры 18 и 19 необходимы для вос5 ходящей ветви G, каретки которой оснащены паковками. Вертикальные ряды кареток, свободные от паковок (после их сталкивания) , могут и не иметь смещения центра масс. Такие каретки нормально функцио0 нируют в угловых позициях направляющих без дополнительных опор 18 и 19, несмотря на наличие контакта кареток только с одним из контуров направляющих. На фиг. 1 дополнительные опоры 18 и 19
5 присутствуют и в нисходящей ветви Е для повышения надежности работы.
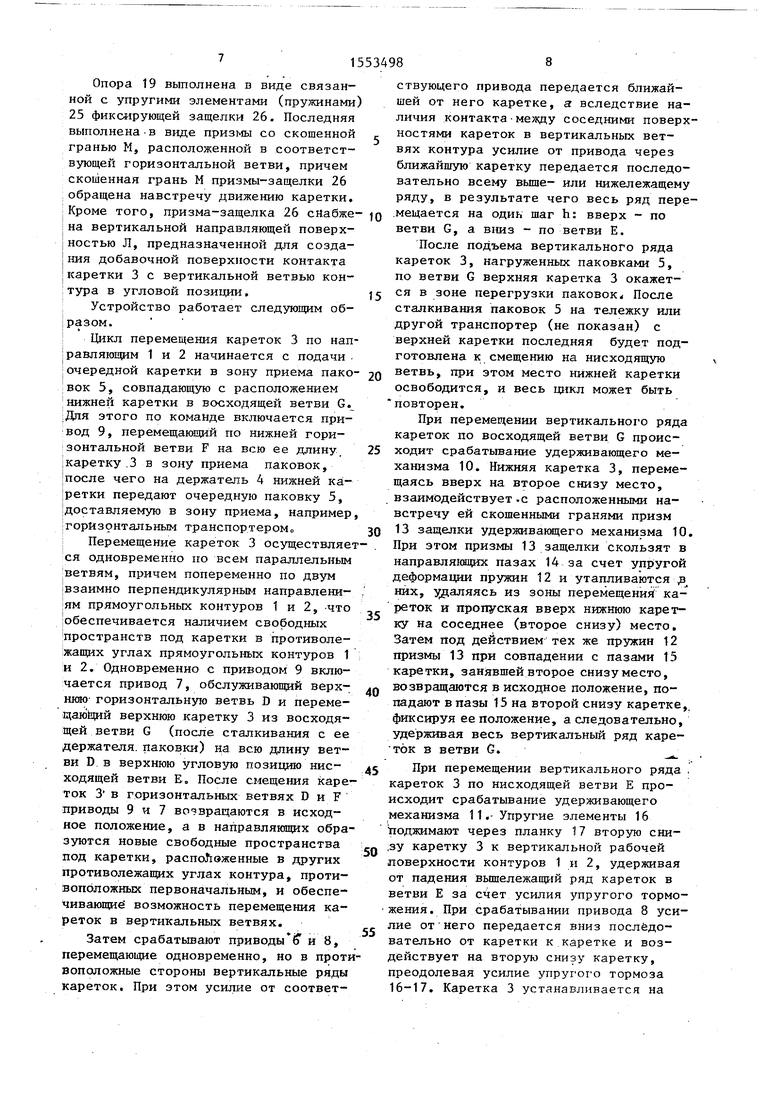
Опора 18 выполнена в виде рычага 20, снабженного вертикальной направляющей поверхностью И, предназначен-
5
ности контакта каретки 3 с вертикальной ветвью контура в его угловых позициях. Рычаг 20 смонтирован на оси 21, закрепленной на соответствующем углу внутреннего контура 2 и связан с приводным фиксатором 22 и пружиной 23 возврата. В горизонтальной ветви D внутреннего контура 2 рядом с осью 21 выполнен паз 24 по габариту рычага 20.
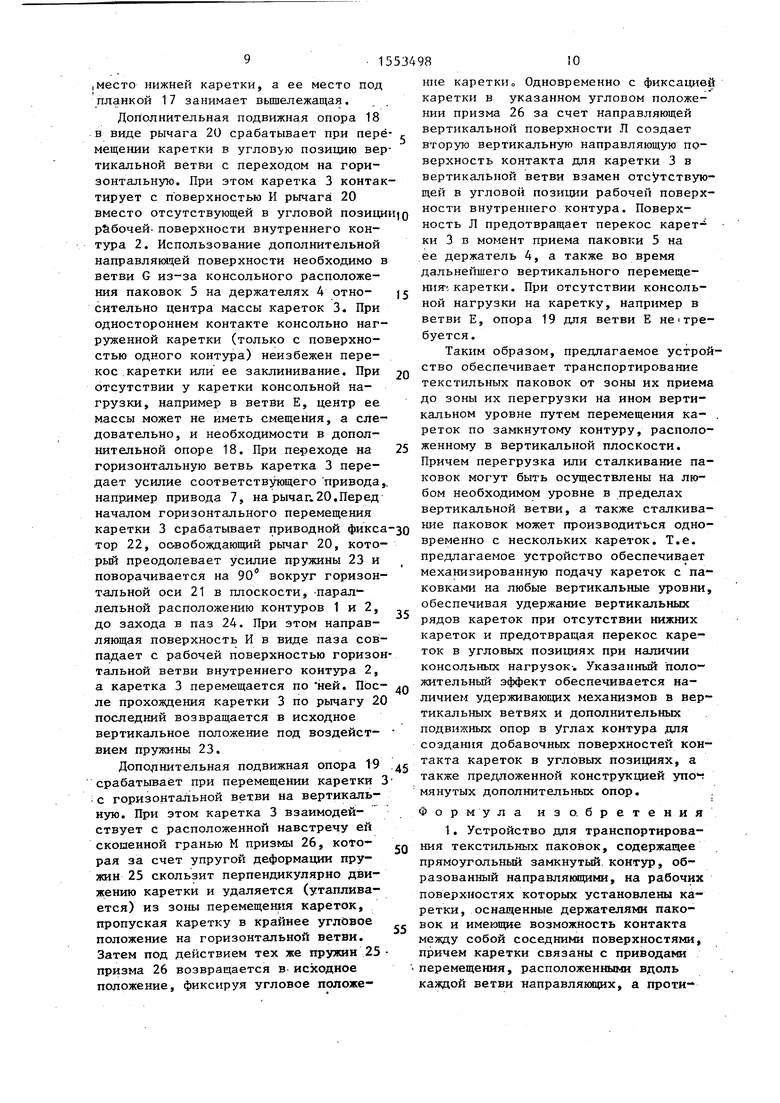
Опора 19 выполнена в виде связанной с упругими элементами (пружинами 25 фиксирующей защелки 26. Последняя выполнена в виде призмы со скошенной гранью М, расположенной в соответствующей горизонтальной ветви, причем скошенная грань М призмы-защелки 26 обращена навстречу движению каретки. Кроме того, призма-защелка 26 снабже на вертикальной направляющей поверхностью Л, предназначенной для созда- 1ния добавочной поверхности контакта каретки 3 с вертикальной ветвью контура в угловой позиции,
Устройство работает следующим образом.
Цикл перемещения кареток 3 по направляющим 1 и 2 начинается с подачи очередной каретки в зону приема пако вок 5, совпадающую с расположением нижней каретки в восходящей ветви G. Для этого по команде включается привод 9, перемещающий по нижней горизонтальной ветви F на всю ее длину каретку 3 в зону приема паковок, после чего на держатель 4 нижней каретки передают очередную паковку 5, доставляемую в зону приема, например горизонтальным транспортером
Перемещение кареток 3 осуществляеся одновременно но всем параллельным ветвям, причем попеременно по двум (взаимно перпендикулярным направлениям прямоугольных контуров 1 и 2, что обеспечивается наличием свободных пространств под каретки в противолежащих углах прямоугольных контуров 1 и 2. Одновременно с приводом 9 включается привод 7, обслуживающий верх- нюю горизонтальную ветвь D и перемещающий верхнюю каретку 3 из восходящей ветви G (после сталкивания с ее держателя паковки) на всю длину ветви D в верхнюю угловую позицию нис- ходящей ветви Е„ После смещения кареток 3 в горизонтальных ветвях D и F приводы 9 и 7 возвращаются в исходное положение, а в направляющих образуются новые свободные пространства под каретки, расположенные в других противолежащих углах контура, противоположных первоначальным, и обеспечивающие возможность перемещения кареток в вертикальных ветвях.
Затем срабатывают приводы б и 8, перемещающие одновременно, но в протвоположные стороны вертикальные ряды кареток. При этом усилие от соответ
5
0 5 0
д $
5
0
5
ствуюцего привода передается ближайшей от него каретке, а вследствие наличия контакта между соседними поверхностями кареток в вертикальных ветвях контура усилие от привода через ближайшую каретку передается последовательно всему выше- или нижележащему ряду, в результате чего весь ряд перемещается на одиь шаг h: вверх - по ветви G, а вниз - по ветви Е.
После подъема вертикального ряда кареток 3, нагруженных паковками 5, по ветви G верхняя каретка 3 окажется в зоне перегрузки паковок После сталкивания паковок 5 на тележку или другой транспортер (не показан) с верхней каретки последняя будет подготовлена к смещению на нисходящую ветвь, при этом место нижней каретки освободится, и весь цикл может быть повторен.
При перемещении вертикального ряда кареток по восходящей ветви G происходит срабатывание удерживающего механизма 10. Нижняя каретка 3, перемещаясь вверх на второе снизу место, взаимодействует.с расположенными навстречу ей скошенными гранями призм 13 защелки удерживающего механизма 10. При этом призмы 13 защелки скользят в направляющих пазах 14 за счет упругой деформации пружин 12 и утапливаются них, удаляясь из зоны перемещения кареток и пропуская вверх нижнюю каретку на соседнее (второе снизу) место. Затем под действием тех же пружин 12 призмы 13 при совпадении с пазами 15 каретки, занявшей второе снизу место, возвращаются в исходное положение, попадают в пазы 15 на второй снизу каретке, фиксируя ее положение, а следовательно, удерживая весь вертикальный ряд каре- ток в ветви G.
При перемещении вертикального ряда , кареток 3 по нисходящей ветви Е происходит срабатывание удерживающего механизма 11.- Упругие элементы 16 поджимают через планку 17 вторую сни- ,зу каретку 3 к вертикальной рабочей поверхности контуров 1 и 2, удерживая от падения вышележащий ряд кареток в ветви Е за счет усилия упругого торможения. При срабатывании привода 8 усилие от него передается вниз последовательно от каретки к каретке и воздействует на вторую снизу каретку, преодолевая усилие упругого тормоза 16-17. Каретка 3 устанавливается на
.место нижней каретки, а ее место под планкой 17 занимает вышележащая.
Дополнительная подвижная опора 18 в виде рычага 20 срабатывает при пере мещении каретки в угловую позицию вертикальной ветви с переходом на горизонтальную. При этом каретка 3 контактирует с поверхностью И рычага 20 вместо отсутствующей в угловой позици рабочей поверхности внутреннего контура 2. Использование дополнительной направляющей поверхности необходимо в ветви G из-за консольного расположения паковок 5 на держателях 4 относительно центра массы кареток 3. При одностороннем контакте консольно нагруженной каретки (только с поверхностью одного контура) неизбежен перекос каретки или ее заклинивание. При отсутствии у каретки консольной нагрузки, например в ветви Е, центр ее массы может не иметь смещения, а следовательно, и необходимости в дополнительной опоре 18. При переходе на горизонтальную ветвь каретка 3 передает усилие соответствующего привода, например привода 7, на рычаг.20.Перед началом горизонтального перемещения
каретки 3 срабатывает приводной фикса зо ™е паковок может производиться одно- тор 22, освобождающий рычаг 20, который преодолевает усилие пружины 23 и поворачивается на 90° вокруг горизонтальной оси 21 в плоскости, парал- лельной расположению контуров I и 2, до захода в паз 24. При этом направляющая поверхность И в виде паза совпадает с рабочей поверхностью горизонтальной ветви внутреннего контура 2,
35
временно с нескольких кареток. Т.е. предлагаемое устройство обеспечивает механизированную подачу кареток с паковками на любые вертикальные уровни, обеспечивая удержание вертикальных рядов кареток при отсутствии нижних кареток и предотвращая перекос кареток в угловых позициях при наличии консольных нагрузок. Указанный полоа каретка 3 перемещается по ней. Пос- 40 жительный эффект обеспечивается нале прохождения каретки 3 по рычагу 20 последний возвращается в исходное вертикальное положение под воздействием пружины 23.
Дополнительная подвижная опора 19 срабатывает при перемещении каретки 3 с горизонтальной ветви на вертикальную. При этом каретка 3 взаимодействует с расположенной навстречу ей скоиенной гранью М призмы 26, которая за счет упругой деформации пружин 25 скользит перпендикулярно движению каретки и удаляется (утапливается) из зоны перемещения кареток, пропуская каретку в крайнее угловое положение на горизонтальной ветви. Затем под действием тех же пружин 25 призма 26 возвращается в исходное положение, фиксируя угловое положе45
50
55
личием удерживающих механизмов в вертикальных ветвях и дополнительных подвижных опор в углах контура для создания добавочных поверхностей контакта кареток в угловых позициях, а также предложенной конструкцией упомянутых дополнительных опор.
Формула изобретения 1. Устройство для транспортирования текстильных паковок, содержащее прямоугольный замкнутый контур, образованный направляющими, на рабочих поверхностях которых установлены каретки, оснащенные держателями паковок и имеющие возможность контакта между собой соседними поверхностями, причем каретки связаны с приводами перемещения, расположенными вдоль каждой ветви направляющих, а проти, ) g
5349810
ние каретки Одновременно с фиксацией каретки в указанном угловом положении призма 26 за счет направляющей вертикальной поверхности Л создает вторую вертикальную направляющую поверхность контакта для каретки 3 в вертикальной ветви взамен отсутствующей в угловой позиции рабочей поверхности внутреннего контура. Поверхность Л предотвращает перекос каретки 3 в момент приема паковки 5 на ее держатель 4, а также во время дальнейшего вертикального перемещения-- каретки. При отсутствии консольной нагрузки на каретку, например в ветви Е, опора 19 для ветви Е неiтребуется.
Таким образом, предлагаемое устройство обеспечивает транспортирование текстильных паковок от зоны их приема до зоны их перегрузки на ином вертикальном уровне путем перемещения кареток по замкнутому контуру, расположенному в вертикальной плоскости. Причем перегрузка или сталкивание паковок могут быть осуществлены на любом необходимом уровне в пределах вертикальной ветви, а также сталкива-
15
20
25
™е паковок может производиться одно-
временно с нескольких кареток. Т.е. предлагаемое устройство обеспечивает механизированную подачу кареток с паковками на любые вертикальные уровни, обеспечивая удержание вертикальных рядов кареток при отсутствии нижних кареток и предотвращая перекос кареток в угловых позициях при наличии консольных нагрузок. Указанный положительный эффект обеспечивается на
личием удерживающих механизмов в вертикальных ветвях и дополнительных подвижных опор в углах контура для создания добавочных поверхностей контакта кареток в угловых позициях, а также предложенной конструкцией упомянутых дополнительных опор.
Формула изобретения 1. Устройство для транспортирования текстильных паковок, содержащее прямоугольный замкнутый контур, образованный направляющими, на рабочих поверхностях которых установлены каретки, оснащенные держателями паковок и имеющие возможность контакта между собой соседними поверхностями, причем каретки связаны с приводами перемещения, расположенными вдоль каждой ветви направляющих, а проти
волежащие углы контура в параллельных ветвях попеременно свободны от кареток, отличающееся тем,, что, с целью улучшения эксплуатционных свойств путем фиксации кареток на различных вертикальных уровнях, замкнутый контур направляющих расположен в вертикальной плоскости, а в вертикальных ветвях контура установлены механизмы для удержания размещенных на них рядов кареток с возможностью контакта с второй снизу кареткой соответствующего вертикального ряда, при этом в углах контура, по меньшей мере прилежащих к ветвям, несущим нагруженные каретки, смонти- %рованы дополнительные подвижные опоры, снабженные направляющими поверхностями для создания дополнительных поверхностей контакта каретки с вертикальной ветвью контура в угловых положениях.
2, Устройство по п..1, отличающееся тем, что дополнител
А- А
24
ная подвижная опора, установленная на углу контура по ходу каретки от вертикальной ветви к горизонтальной,включает рычаг, установленный на оси, закрепленной на углу контура, и связанный с ним фиксатор и пружину возврата, причем рычаг размещен с возможностью поворота в плоскости, параллельной контуру направляющих, и захода в паз, выполненный в горизонтальной ветви контура.
Зо Устройство по п. 1, отличающееся тем, что дополнительная подвижная опора, установленная на углу контура по ходу каретки от горизонтальной ветви к вертикальной, выполнена в виде подпружиненной защелки, смонтированной в направляющих горизонтальной ветви соответствующего угла и снабженной вертикальной направляющей поверхностью для контактирования с кареткой.
б-е
Фиг.
Фиг. 5
J
«г
Фиг. 6
| Авторское свидетельство СССР К 1302539, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
