к

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ориентированной укладки в тару кольцеобразных предметов | 1986 |
|
SU1406039A1 |
| Устройство для укладки штучных изделий в тару | 1986 |
|
SU1324929A1 |
| Устройство для ориентированной укладки в тару с несущими штырями кольцеобразных предметов | 1989 |
|
SU1611790A1 |
| Укладчик черепицы | 1990 |
|
SU1729759A2 |
| Укладчик черепицы | 1989 |
|
SU1620307A1 |
| Устройство для укладки штучных изделий в тару | 1979 |
|
SU973412A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ СТРОИТЕЛЬНЫХ БЛОКОВ ПРЕССОВАНИЕМ, ПРЕСС-ФОРМА И ЛИНИЯ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1995 |
|
RU2087307C1 |
| КОМПЛЕКС ПОДЪЕМНО-ТРАНСПОРТНОГО ОБОРУДОВАНИЯ ДЛЯ УТИЛИЗАЦИИ ЖИДКИХ РАДИОАКТИВНЫХ ОТХОДОВ НА АТОМНОЙ ЭЛЕКТРОСТАНЦИИ И ЕГО СОСТАВНЫЕ ЧАСТИ | 2007 |
|
RU2350545C1 |
| Устройство для укладки в тару легкоповреждаемых предметов | 1989 |
|
SU1652200A1 |
| Плодоуборочная машина | 1983 |
|
SU1143340A1 |




Изобретение относится к устройствам для автоматической ориентированной укладки кольцеообразных предметов, например бобин, в контейнер на штырьевую тележку или на штырьевой поддон. Цель изобретения - уменьшение повреждения предметов. Устройство содержит транспортер 1 для подачи предметов 2 на позицию укладки, подъемный механизм, расположенный на позиции укладки, опорную площадку, толкатель, штырьевую гребенку. Над транспортером установлен механизм для съема предметов 2, состоящий из каретки и траверсы. На траверсе смонтированы пневмоцилиндры и захваты. Для изменения положения траверсы служит стрелочный перевод. Устройство также включает накопитель для формирования группы бобин, выполненный в виде сопряженного с транспортером 1 поворотного неприводного рольганга с упором - ограничителем 41, упором 42 и боковыми ограничителями 43. Предметы с транспортера 1 подаются на рольганг 40 и после набора бобин датчик дает команду на его поворот в горизонтальное положение. Одновременно поворачиваются и боковые ограничители 43, обеспечивая доступ для захвата бобин. з.п. ф-лы, 12 ил.
77/77/ /77 ////// /// ////// S// /// ////// /////////////// /// /// /// /// ///
Фиг. 9
Изобретение относится к устройствам для автоматической ориентированной укладки кольцеобразных предметов, например бобин, в контейнер, на штырьевую тележку или на штырьевой поддон, может быть использовано в составе роботизированного комплекса для ориентированной укладки предметов в тару и является усовершенствованием устройства по авт. св. № 1406039.
Цель изобретения - уменьшение повреж- дения предметов путем исключения взаимодействия их нижних слоев с движущимися элементами устройства при наборе ряда предметов.
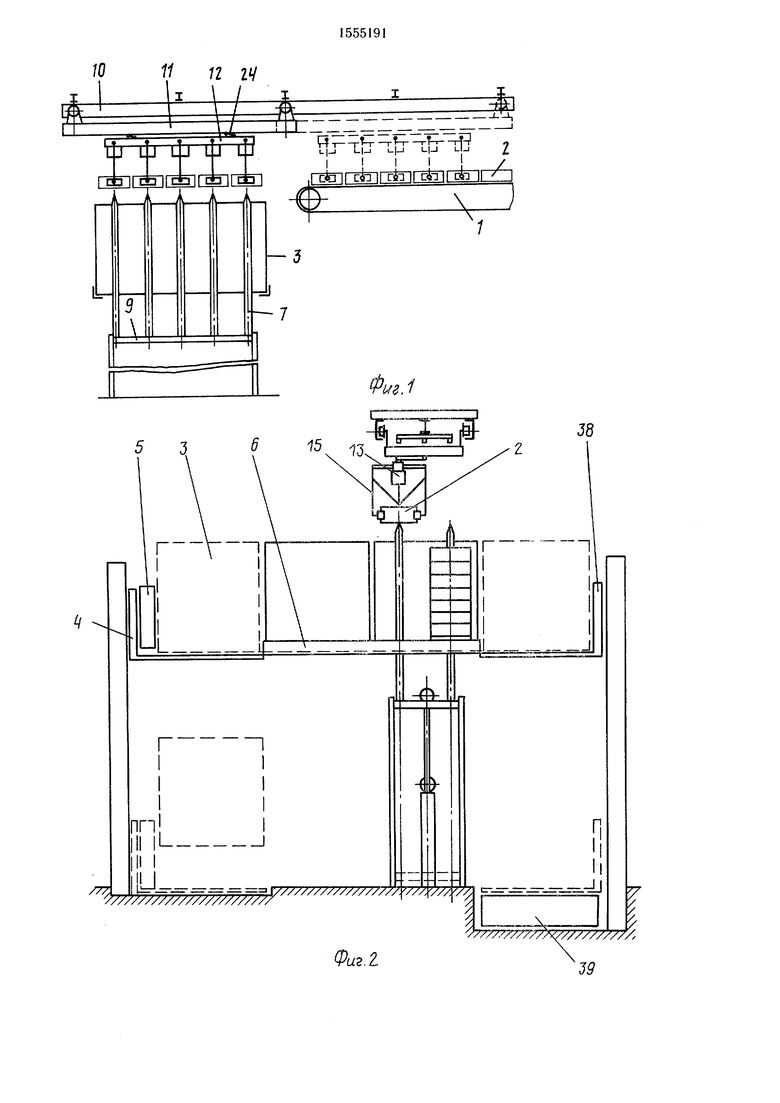
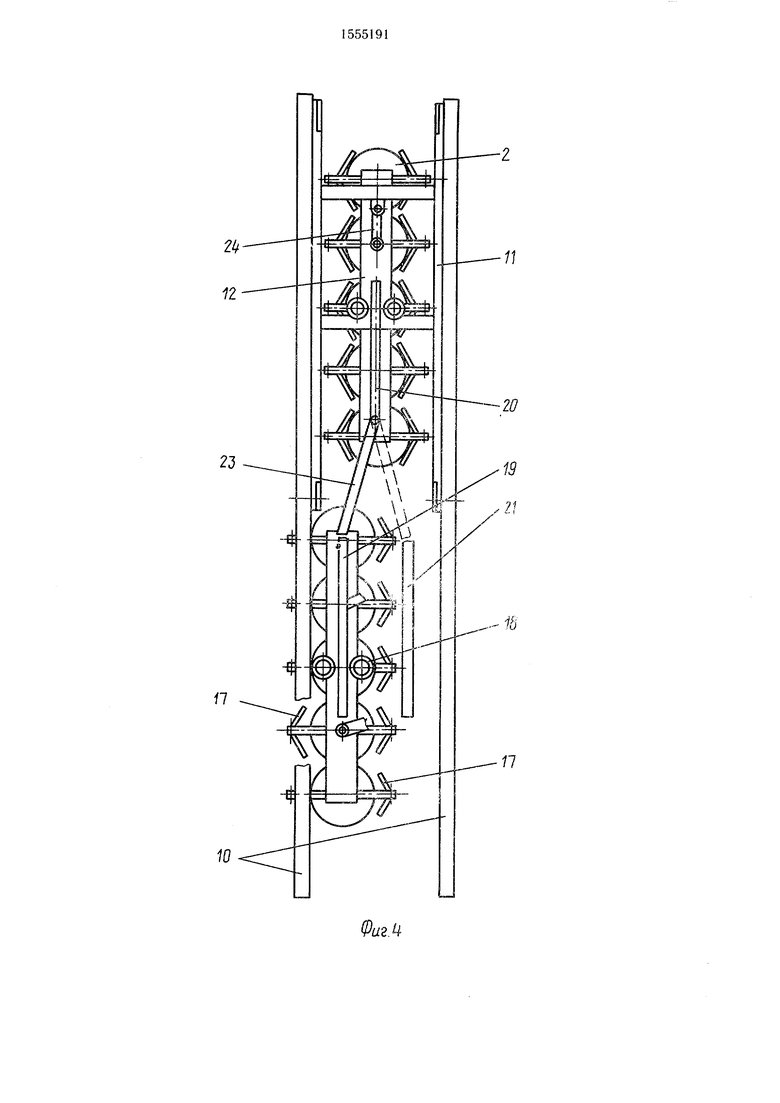
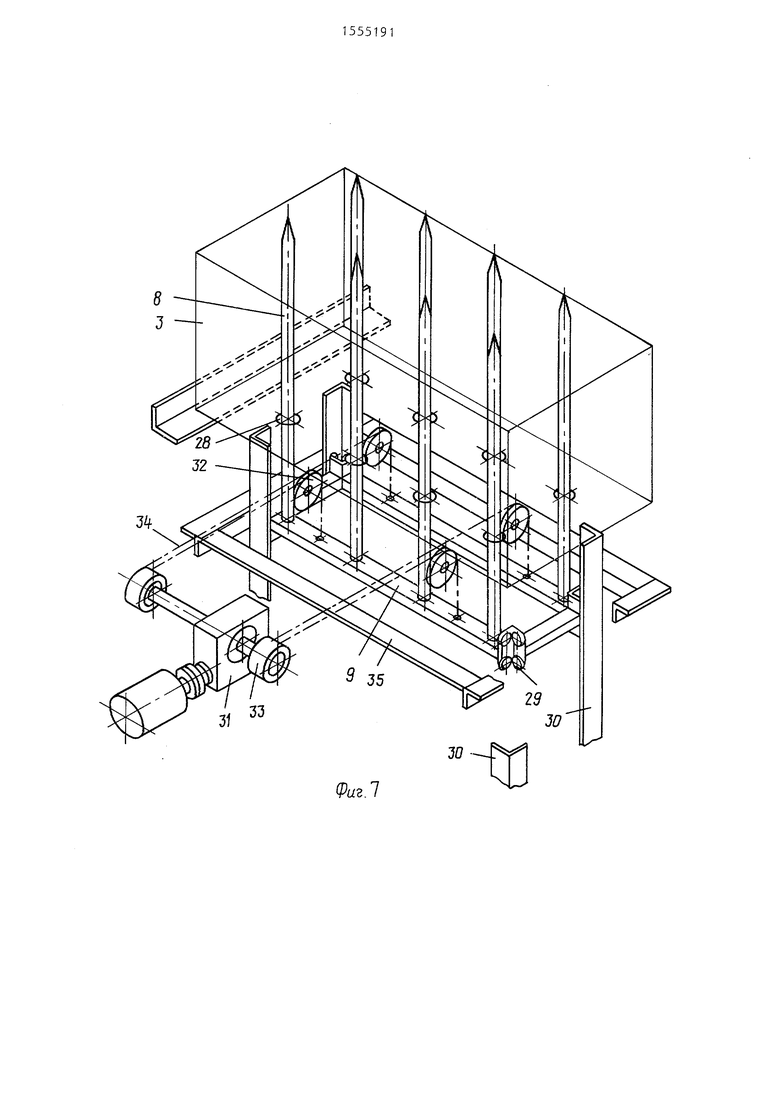
На фиг. 1 изображено устройство, об- щий вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - то же, вид сверху; на фиг. 4 - каретка с захватами в раскрытом положении, вид сверху; на фигг 5 - каретка с захватами в рабочем положении; на фиг. 6 - разрез А-А на фиг. 3; на фиг. 7 -- штыревая гребенка с контейнером; на на фиг. 8 - штырь; на фиг. 9 - поворотный рольганг на позиции укладки, вид сбоку; на фиг. 10 - то же, вид сверху; на фиг. 11 - поворотный рольганг на позиции укладки в горизонтальном положении, вид сбоку; на фиг. 12 - разрез Б-Б на фиг. 9
Устройство для ориентированной укладки в тару кольцеобразных предметов содержит транспортер 1 для подачи предметов (бо бин) 2 на позицию укладки, приспособле- ние для размещения предметов в таре (контейнере) 3, которое включает подъемный механизм, расположенный на позиции укладки и состоящий из опорной площадки 4 для размещения тары 3, толкатель 5, направляющие 6 и смонтированную с возмож ностью перемещения в вертикальной плоскости штырьевую гребенку 7, штыри 8 которой, расположенные в два ряда, выполнены с возможностью перемещения в отверстиях в дне тары (контейнере) 3 и закреп- лены на раме 9.
Над транспортером 1 установлен механизм для съема предметов 2, который состоит из горизонтальных направляющих 10, каретки 11 и траверсы 12. На траверсе 12 смонтированы пневмоцилиндры 13 и пять захватов в виде шарнирных рычагов 14-16. На конце рычагов 15 размещены зажимы 17 в виде пластин, установленных под углом друг к другу для центрирования и захвата предметов (бобин) 2.
Траверса 12 имеет опорные ролики 18 для перемещения по направляющим 19- 21, а каретка 11 - опорные ролики 22 для перемещения по направляющим 10. Для изменения положения траверсы 12 служит стрелочный перевод 23, имеющий привод (не показан). Стрелка его одним концом шарнирно соединена с направляющей 20, а другим концом имеет возможность стыковаться с направляющими 19 и 21
Для ориентированной установки захватов над контейнером траверса 12 смонтирована на каретке 11 с возможностью относительного перемещения в горизонтальной плоскости, т. е. поворота при помощи шарнирных рычагов 24, один конец каждого из которых шарниром 25 соединен с траверсой 12, а другим концом шарниром 26 соединен с кареткой 11. Для фиксации каретки 11 к позиции загрузки в направляющих 10 имеется углубление 27.
Тара (контейнер) 3 имеет отверстия 28 в дне, а штырьевая гребенка снабжена опорными роликами 29 для передвижения по направляющим 30 с помощью привода 31, блоков 32, барабанов 33 и троса 34. Штырьевая гребенка 7 с приводом смонтирована на каркасе 35, установленном на полу. Штыри 8 гребенки снабжены тормозка- ми 36.
J/стройство имеет датчик 37 для подачи сигнала на срабатывание пневмоцилинд- ру 13, площадку 38 и весы 39. Устройство снабжено накопителем для формирования группы предметов (бобин), выполненным в виде сопряженного с транспортером 1 поворотного неприводного рольганга 40, который имеет стационарный упор-ограничитель 41, упор 42 и боковые ограничители 43. смонтированные на оси 44 с возмож- нсст.ю поворота в вертикальной плоскости. L7QKreLie ограничители соединены планками 45.
Рольганг 40 смонтирован с возможностью i:c :.рота в ггртнка ib. ir- i n носкости на оси 46 , гложет быть снабжен свободно вращаю- ичг лчся Цйликд ичесхчйч роликами 47, имеющими в с.Х ичне каждого из них кольцевые канаьни 48 для Г атронов бобин.
Для осущес 1 г.i :;; : поворота служит система рычагов в ci-v ,o с ;юнтированного шарнира 49 на роликовое конвейере и смонтированного на боковых ограничителях шарнира 50, на которых закреплены, тяги 51 и 52 и рычаг 53. Тяга 52 и рычаг 53 имеют оси 54 и 55 вращения. Соотношения размеров тяг выбрано так, что при повороте боковые ограничители 43 опускаются первыми, затем рольганг 40, а при подъеме наоборот. На рычаге 53 установлен противовес 56 и электромагнит 57.
На рольганге 40 смонтирован датчик 37 в виде импульсного счетчика, снабженный подпружиненным щупом 58.
Устройство работает следующим образом.
С ряда прядильных машин бобины 2 поступают по транспортеру 1 к позиции укладки и сходят на сопряженный с ним поворотный неприводной рольганг 40. Посредством подпружиненных щупов 58 патроны бобин направляются в канавки 48 цилиндрических роликов 47. Бобины, опираясь на поверхность свободно вращающихся роликов, под действием собственного веса по наклонной поверхности перемещаются до упора- ограничителя 41. После накопления на рольганге пяти бобин датчик (импульсный счетчик) 37 подает сигнал для останова транспортера 1 и включения электромагнита 57, который через тяги 51 и 52 и рычаг 53 поворачивает рольганг 40 с боковыми ограничителями 43 в горизонтальное положение. При этом рольганг 40 поворачивается на оси 46 до упора 42, а боковые ограничители 43, поворачиваясь на оси 44, опускаются ниже уровня роликового конвейера, чтобы не мешать зажимам 17 захватывать бобины. Каретка 11 находится над роликовым конвейером в исходном состоянии (т. е. с раскрытыми зажимами) и зафиксированном положении опорными роликами 22 в углублении 27 направляющих 10. Контейнер 3 ставят на опорную площадку 4 и поднимают до уровня загрузки (привод Fie показан).
После этого включают привод толкателя 5 (не показан) и передвигают контейнер 3 по направляющим 6 до позиции загрузки. В это время включают привод 31 и приводят в движение подвижную штырье- вую гребенку 7, которая передвигается с помощью опорных роликов 29, блоков 32, барабанов 33 и троса 34 по направляющим 30, и штыри 8 входят в отверстия 28 контейнера 3.
По сигналу с датчика 37 срабатывают пневмоцилиндры 13 и зажимы 17 захватывают пять бобин, затем каретка 11, двигаясь по направляющим 10, а вместе с ней и траверса 12 с бобинами 2 в зажимах 17 перемещаются по направляющим 19 и 20, приподнимая бобины над роликовым конвейером.
В зоне выгрузки каретка 11 останавливается, фиксируется в углублении 27 направляющих 10, рычаги 15 и 16 раскрываются и бобины опускаются на ряд штырей 8. После этого каретка 11 с траверсой 12 возвращается за очередной партией бобин, рольганг 40 с боковыми ограничителями 43 под действием противовеса 56 посредством тяг 52 и 51 и рычага 53 занимают наклонное (первоначальное) положение, а импульсный счетчик 37 подает сигнал для включения транспортера 1.
Для укладки бобин на оба ряда штырей
стрелку стрелочного перевода 23 стыкуют с направляющей 20 или с направляющей 21, тем самым изменяя направление движения траверсы 12, которая может поворачиваться относительно каретки при помощи шарнирного рычага 24.
Тормозки 36 уменьшают удары бобин друг о друга.
После заполнения контейнера 3 штырье- вую гребенку 7 опускают, т. е. штыри 8 освобождаются от бобин, а заполненный кон5 тейнер передвигают на площадку 38 с помощью толкателя 5 и очередного поднятого на площадке 4 контейнера. Затем контейнер на площадке 38 опускают на весы 39, взвешивают, грузят и отправляют для дальнейших технологических операций.
0
Формула изобретения
преимущественно бобин, по авт. св. № 1406039, отличающееся тем, что, с целью уменьшения повреждения предметов, оно снабжено накопителем для формирования группы предметов, расположенных в ряд,
0 выполненным в виде сопряженного с транспортером для подачи предметов на позицию укладки поворотного неприводного рольганга с боковыми ограничителями, при этом поворотный рольганг и боковые ограничители смонтированы с возможностью пово5 рота в вертикальной плоскости посредством системы рычагов вокруг соответствующих не совпадающих друг с другом осей для перевода в горизонтальное положение сформированного ряда предметов и отвода ограниQ чителей ниже его уровня.
/О11 П 14
I
ш UJ то
S
R
Ll lL| l1 | |1 | 11-| 1
LjJ L|J L|J LU2
Ij1I|/
I ckni c« II rh || dn II зя ц i
|L
Ml
/ТА
/////////////////////////
Фаг.г
;
r
Фие. 1
fflw.3
10
11
27
23
26
25 t4
22
22
12
L™d)
eigggi
ЦЦ ЦЬ г
L.
п
58
48
ЈШте
TSJ j
(Риг. 8
47 1
J
/
i/г. Й7
37
М Ц
///////////////////// J7-&/ /// ГЯТТЯГЗГЯГЯГЖЗГЯГ У/) /////S
Фиг, 11
e-ff
с
rw
5В
50
| Устройство для ориентированной укладки в тару кольцеобразных предметов | 1986 |
|
SU1406039A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
