(21)4419171/23-03
(22)03.05.88
(46) 07.04.90. Бкш. № 13
(71)Уфимский авиационный институт им. Серго Орджоникидзе
(72)М.А.Ураксеев, Г.В.Миловзоров и О.Н.Штанько
(53)622.242 (088.8)
(56)Авторское свидетельство СССР № 595496, кл. Е 21 В 47/022, 1974.
Молчанов А.А. Измерение геофизических и технологических параметров в процессе бурения скважин, - М.: Недра, 1983, с. 96-97.
(54)СПОСОК ОПРЕДЕЛЕНИЯ АЯИМУТА ИСКРИВЛЕНИЯ ТРАЕКТОРИИ СКВАЖИНЫ
(57)Изобретение относится к промысловой геофизике и позволяет повысить точность определения азимута искривления траектории скважины (с) в ферромагнитных средах. Перемещают измерительный прибор (П) , 1 в С и определяют датчиками 2 и 3 на каждом интервале i измерений зенитный угол в и апсидальный угол if., На каждом интервале измерений измеряют датчиком 4 и фиксируют проекцию V угловой скорости П 1 на его продольную ось, Осуществляют последовательные измерения в С от точки с известным азимутом
Азимут
с п искривления траектории С определяют из уравнения
П t i
n о + J ( J V-dt - (if. - ti-i
-M.t)/cos(e{ + е.„ )/2,
где п - число интервалов измерений, t - время движения П по траектории С. 2 ил.
(Л

Изобретение относится к промысловой геофизике и позволяет повысить точность определения азимута искривления траектории скважины (С) в ферромагнитных средах. Перемещают измерительный прибор (П) 1 в С и определяют датчиками 2 и 3 на каждом интервале I измерений зенитный угол ΘI и апсидальный угол φI. На каждом интервале измерений измеряют датчиком 4 и фиксируют проекцию V угловой скорости П 1 на его продольную ось. Осуществляют последовательные измерения в С от точки с известным азимутом αо. Азимут αN искривления траектории С определяют из уравнения αN = αо + ΣI=1( *981 V.DT - (φI - φI-1)/COS(ΘI+ΘI-1)/2, где N - число интервалов измерений, T - время движения П по траектории С. 2 ил.
сп
ел
О1
1
tt
Изобретение относится к промысловой геофизике и может быть использовано для определения азимута искривления траектории скважины в ферромагнитных средах.
Цель изобретения - повышение точ- ности определения азимута.
На фиг,1 приведена векторная диаграмма, поясняющая способ-определения азимута искривления траектории скважины: на фиг.2 - устройство, реализующее предлагаемый способ.
Для определения азимута искривления траектории скважины по предла- ггемому способу в корпусе измерительного прибора 1 устанавливают датчик 2 зенитного угла В ,датчик 3 апсидального угла Ц и датчик 4 угловой скорости, причем ось чувствительности датчика 4 угловой скорости совпадает с продольной осью прибора 1, При движении прибора по скважине он может совершать вращательные движения в плоскости зениткого угла, плоскости азимута и в апсидальной плоскости (вокруг собственной оси)о Датчик 4 угловой скорости не чувствителен к вращательным движениям в плоскости зенитного угла, поскольку его ось чувствительности перпендикулярна вектору угловой скорости вращательного движения в плос-
кости зенитного угла, и сигнал с этого датчика 4 пропорционален модулю проекции V вектора Ч ц угловой скорости вращения прибора вокруг собственной оси и вектора V угловой скорости вращения прибора в азимутальной плоскости.
Из векторной диаграммы (фиг.1)
видно, что
V Vd cos 0. (1)
Скорость V / изменения азимута скважины определяют из уравнения в виде
V
V - VLf
(2)
Если разбить траекторию скважины на достаточно малые интервалы измерения, на которых зенитный угол 9 изменяется незначительно и его можно принять постоянной величиной, то на таком интервале измерения можно с достаточно высокой точностью определить приращение До( азимута скважины из следующего уравнения:
Vdt - (if. -if..,} i-i
cos
(
e, + )
-)
0
5
0
5
где t - время движения прибора по
траектории скважины, i-1 и
i - начальная и конечная точки
интервала измерения. Перемещают измерительный прибор 1 (фиг,1) в скважине и определяют датчиками 2, и 3 на каждом интервале i измерений зенитный угол б; и ап- сйдальный угол q.. На каждом интервале измерений измеряют датчиком 4 и фиксируют проекцию V угловой скорости прибора на его продольную ось Осуществляют последовательные измере- ния в скважине от точки с известным азимутом . Азимут искривления траектории скважины в любой точке определяют из уравнения Ь
U.+
п
} Vdt - (if, -%.,)
COS
(
6-, +
)
,(4)
30
35
40
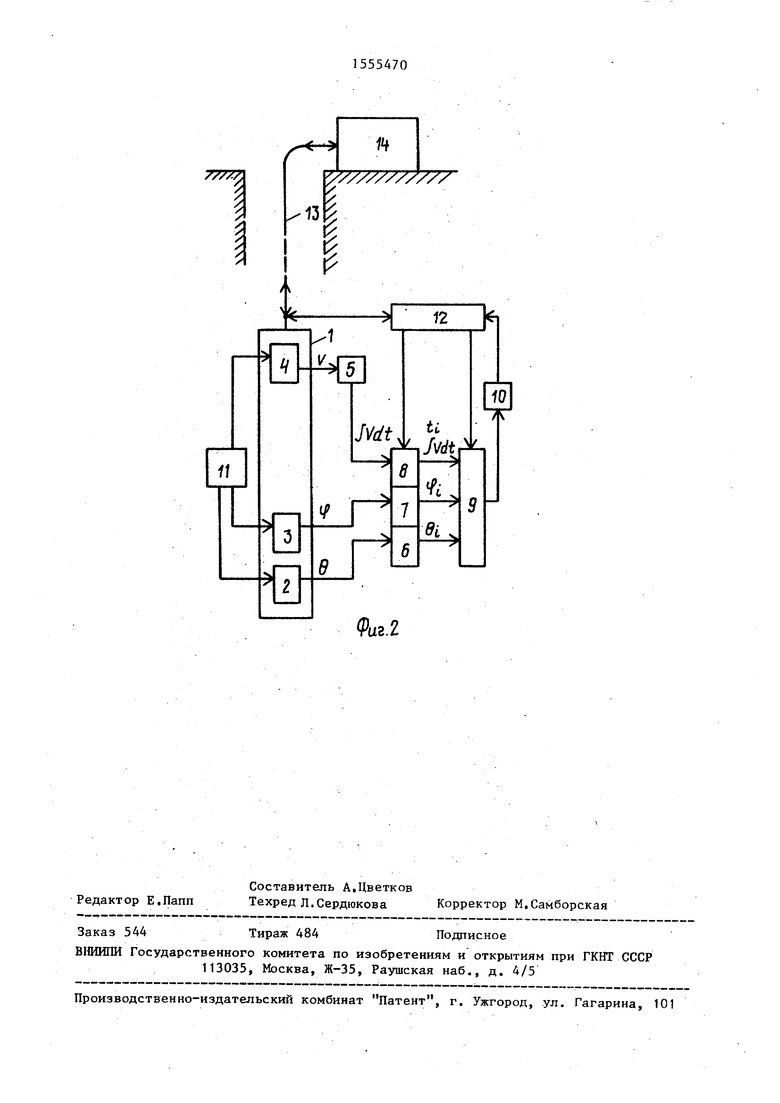
где п - число интервалов измерений. Устройство, реализующее предлагаемый способ (фиг,2), состоит из прибора 1, датчиков 2 и 3 зенитного и апсидального углов, датчика 4 угловой скорости, ось чувствительности которого совпадает с продольной осью прибора 1, интегратора 5, устройств выборки-хранения (УВХ) 6-8, коммутатора 9, аналого-цифрового преобразования (АЦП) 109 генератора 11 возбуждения и скважинного блока телесистемы (ТЛС) 12. Выходы датчиков 2 и 3 зенитного и апсидального углов через УВХ 6 и 7 подключены к входам коммутатора 9, а выход датчика 4 уг- 45 ловой скорости подключен к входу интегратора 5, выход которого через УВХ 8 подключен к входу коммутатора 9, Выход коммутатора 9 связан с входом АЦП 10, выход которого подключен к ТЛС 12. Выходы ТЛС 12 подключены к управляющим входам УВХ 6 - 8 и к управляющему входу коммутатора 9,Генератор 11 возбуждения связан с входами возбуждения датчиков 2 - 4,двунаправленный вход - выход ТЛС 12 связан через кабель 13 с наземным пультом 14.
Устройство работает следующим образом.
50
55
Генератор 11 возбуждения запиты- вает датчики 2-4. Сигнал с датчика 4 угловой скорости,пропорциональный проекции V угловой скорости устройства на его продольную ось,интегрируется интегратором 5 и поступает на вход УВХ 8, сигналы с датчиков 2 и 3 зенитного и апсидального углов пропорциональные зенитному углу 0 и апсидапьному углу ц , поступают на входы УВХ 6 и 7, В начальной точке интервала измерения с наземного пульта 14 через кабель 13 и ТЛС 12 подается на управляющие входы УВХ 6-8 импульс, переводящий их в состояние хранения, и на выходах УВХ 6-8 запоминаются соответственно
К значения в. , (.1 и ) Vdt.Затем
о управляющие сигналы с наземного пуль
та 14 через кабель 13 и ТЛС 12 поступают на управляющий вход коммутатора 9, который последовательно подключает выходы УВХ 6 - 8 на вход ЩИ
V
if. и 3 Vdt -i о
преобразуются в цифровую форму и через ТЛС 12 и кабель 13 передаются в наземный пульт 14. В конечной точке интервала измерения подобным образом получают сигналы и цифровое значение
V 6; , . и J Vdt, которые уже являются
начальными для последующего интервала измерения, В наземном пульте 14
производят вычисление величины t;
J Vdt в виде
i-1.. l i-
J1 Vdt S Vdt - J Vdt.
ill ° Азимут dh искривления траектории
скважины определяют из уравнения
10, где значения 6 ;н
n
.1 Lmt -11
cesf-O-Ll..-,,
Таким образом, устройство полностью реализует способ определения азимута искривления траектории скважины.
0
5
0
5
0
5
0
Предлагаемый способ позволяет определять азимут искривления траектории скважины с более высокой точностью, обусловленной заменой определения приращения азимута из условий пространственного кручения колонны труб, производимого с низкой точностью, определением приращений азимута с помощью датчика угловой скорости, кроме того, исключается погрешность, вносимая в олредапение азимута в известном способе неточной установкой верхнего инклинометра на место нижнего и неточной ориентацией инклинометров относительно друг друга.
Предлагаемый способ позволяет сократить время на инклинометрию скважины, так как измерения проводят при непрерывном движении устройства по стволу скважины, причем перемещение устройства осуществляется с помощью .кабеля, а не колонны труб.
Формула изобретения
Способ определения азимута искривления траектории скважины, включающий перемещение измерительного прибора в скважине, определение на каждом интервале i измерений зенитного угла в; и апсидального угла ср и определение азимута искривления траектории скважины последовательными измерениями в скважине от точки с известным азимутом of0, отличающийся тем, что, с целью повышения точности определения азимута, на каждом интервале измерения измеряют и фиксируют проекцию V угловой скорости прибора на его продольную ось, а азимут e/h искривления траектории скважины определяют из уравнения
rfn- dt
50
где п - число интерзалов измерений t - время движения прибора по траектории скважины.
