О,
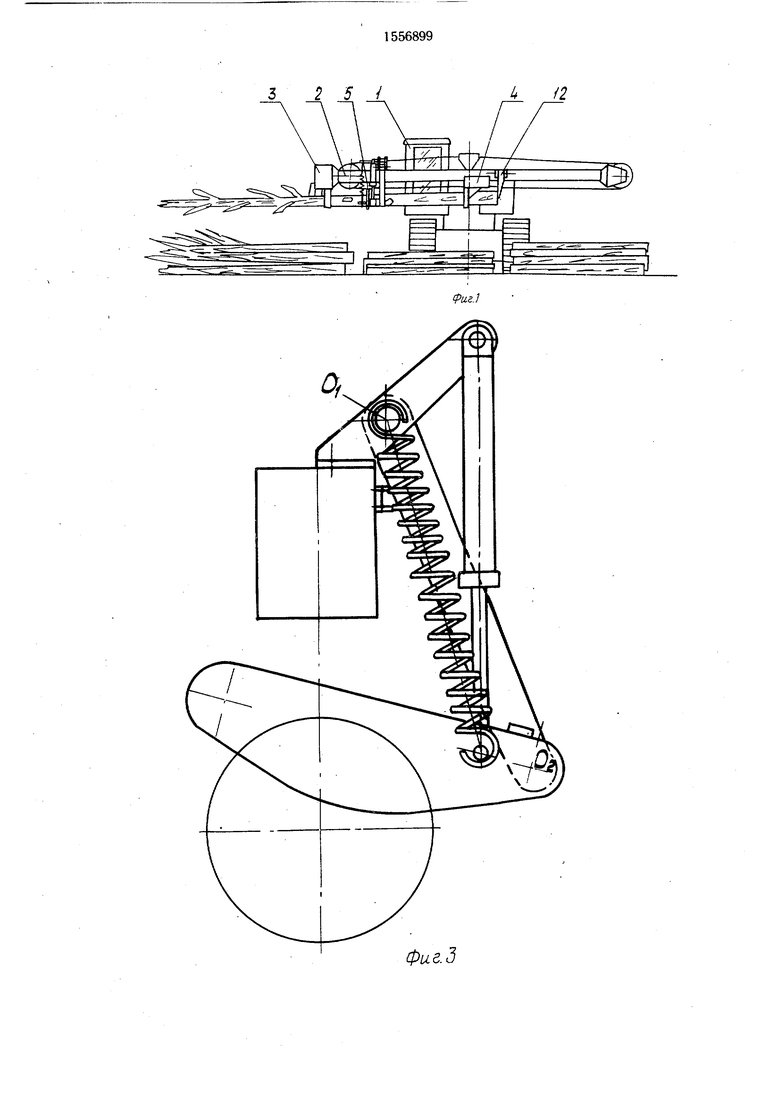
фигЗ
О,
Фаг.1}
| название | год | авторы | номер документа |
|---|---|---|---|
| Многооперационный сборочный центр | 1985 |
|
SU1271717A1 |
| Станок для обработки изделий ротационными инструментами | 1988 |
|
SU1716959A3 |
| Привод шагового перемещения | 1988 |
|
SU1574449A1 |
| Робот манипуляционный промышленный | 2019 |
|
RU2718025C1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Исполнительный орган манипулятора | 1985 |
|
SU1268398A1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ СХВАТА МАНИПУЛЯТОРА | 2004 |
|
RU2288092C2 |
| Агрегатный станок | 1985 |
|
SU1288026A1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ДЕТАЛЕЙ С НАКОПЛЕНИЕМ ИХ В КАССЕТАХ | 2015 |
|
RU2604161C2 |
Изобретение относится к машиностроению и может быть использовано в конструкциях манипуляторов. Целью изобретения является повышение точности позиционирования и уменьшение энергопотребления. Силовая головка 4 рукой 1 и колонной 2 перемещается в рабочую позицию. При этом ролик базирующего узла 5 набегает на цилиндрическую поверхность неподвижной опоры 9. Затем штоком 8 фиксатор 7 поджимает неподвижную опору 9 снизу. После окончания работы силовой головки 4 движения производятся в обратном порядке. Далее цикл повторяется. Применение неподвижной опоры 9 в сочетании с базирующим узлом 5 и фиксатором 7, составляющими устройство компенсации деформаций элементов манипулятора, под рабочей нагрузкой позволяет повысить точность позиционирования. 3 ил.
| Машина для обрезки сучьев с поваленных деревьев | 1980 |
|
SU950527A2 |
