Изобретение относится к технологии автоматической сварки, а именно к программированию сварочных роботов методом обучения.
Целью изобретения является повышение производительности программирования путем автоматического вывода сварочного инструмента из зоны его наезда на поверхность свариваемого изделия.
Поставленная цель достигается тем, что при программировании сварочных роботов обучением при наезде инструмента на препятствие производят автоматическое переключение на обратный ход приводов координатных перемещений, работа которых приводит к наезду, а вывод инструмента из зоны наезда производят в направлении, противоположном направлению наезда.
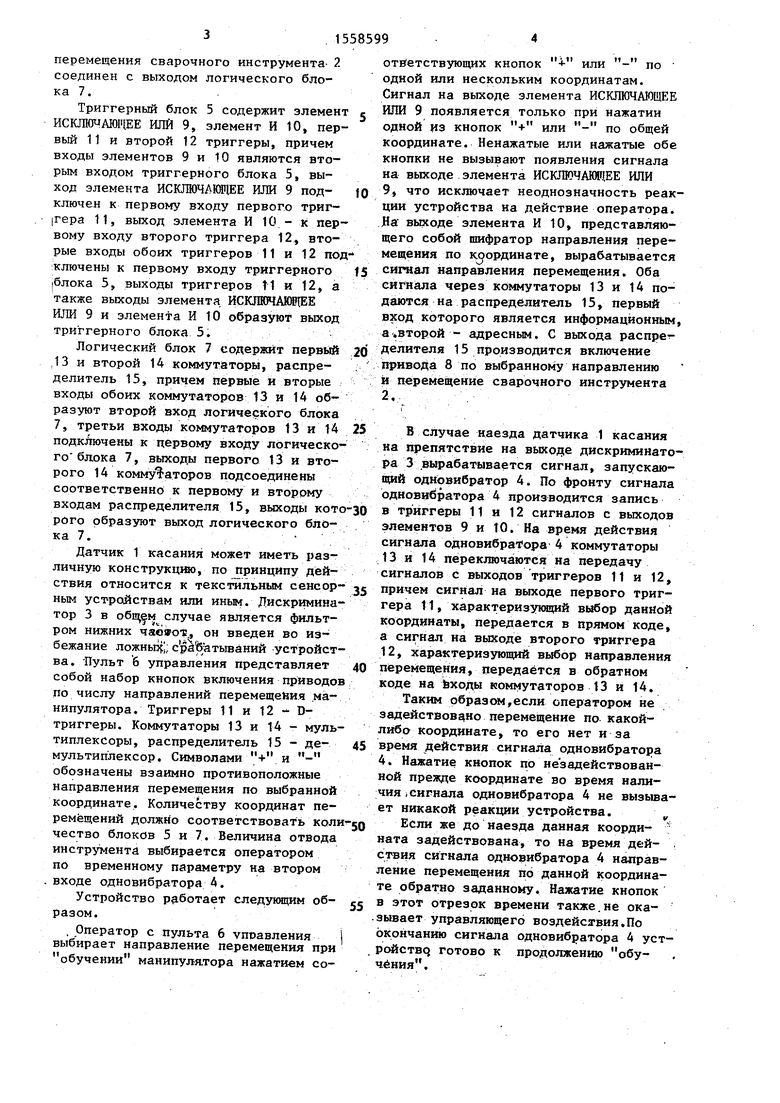
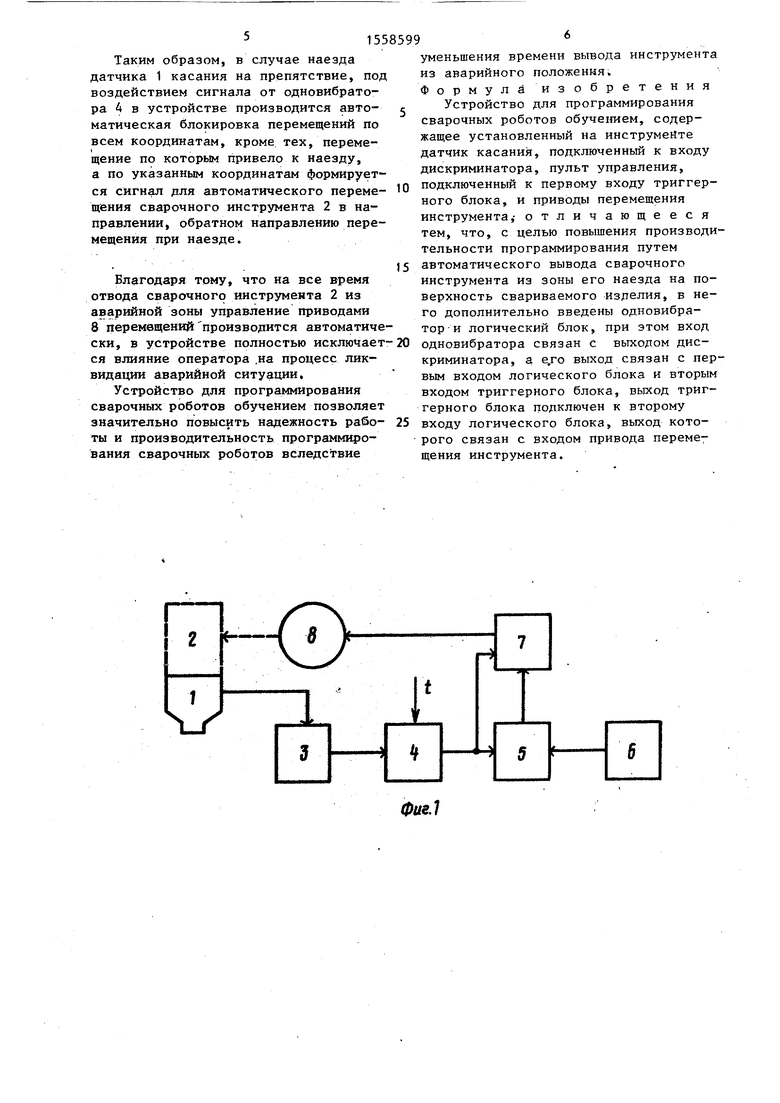
На фиг. 1 представлена структурная г схема устройства; на фиг. 2 - функциональная схема триггерного и логического блоков.
Устройство содержит датчик 1 касания, установленный на сварочном инструменте 2, дискриминатор 3, одновибратор 4, триггерный блок 5, пульт 6 управления, логический блок 7 и приводы 8 перемещения сварочного инструмента 2. Датчик 1 касания подключен к дискриминатору 3, выход которого подключен к входу одновибратора 4. Выход одновибратора 4 соединен с первыми входами триггерного блока 5 и логического блока 7. К второму входу триггерного блока 5 подключен пульт 6 управления, а выход триггерного блока 5 соединен с вторым входом логического блока 7. Вход приводов 8
перемещения сварочного инструмента- 2 соединен с выходом логического блока 7.
Триггерный блок 5 содержит элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 9, элемент И 10, первый 11 и второй 12 триггеры, причем входы элементов 9 и 10 являются вторым входом триггерного блока 5, выход элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 9 под- ключей к первому входу первого триг- irepa 11, выход элемента И 10 - к первому входу второго триггера 12, вторые входы обоих триггеров 11 и 12 подключены к первому входу триггерного (блока 5, выходы триггеров t1 и 12, а также выходы элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 9 и элемента И 10 образуют выход триггерного блока 5.
Логический блок 7 содержит первый 13 и второй 14 коммутаторы, распределитель 15, причем первые и вторые входы обоих коммутаторов 13 и 14 образуют второй вход логического блока 7, третьи входы коммутаторов t3 и 14 подключены к первому входу логического бяока 7, выходы первого t3 и второго 14 коммутаторов подсоединены соответственно к первому и второму входам распределителя 15, выходы кото рого образуют выход логического блока 7.
Датчик 1 касания может иметь различную конструкцию, по принципу действия относится к текстильным сенсор- ным устройствам или иным. Дискриминатор 3 в случае является фильтром нижних ., он введен во избежание ложньпЈ, с ра йатываний устройства. Пульт 6 управления представляет собой набор кнопок включения приводов по числу направлений перемещения манипулятора. Триггеры 11 и 12 - D- триггеры. Коммутаторы 13 и 14 - мультиплексоры, распределитель 15 - де-
мультиплексор. Символами + и - обозначены взаимно противоположные направления перемещения по выбранной координате. Количеству координат перемещений должно соответствовать КОЛИ чество блоков 5 и 7. Величина отвода инструмента выбирается оператором по временному параметру на втором . входе одновибратора 4.
Устройство работает следующим образом.
, Оператор с пульта 6 управления выбирает направление перемещения при обучении манипулятора нажатием со
5
0 5 0
$ 0 5
Q
5
ответствующих кнопок + или - по одной или нескольким координатам. Сигнал на выходе элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 9 появляется только при нажатии одной из кнопок + или - по общей координате. Ненажатые или нажатые обе кнопки не вызывают появления сигнала на выходе элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 9, что исключает неоднозначность реакции устройства на действие оператора. Да выходе элемента И 10, представляющего собой шифратор направления перемещения по координате, вырабатывается сигнал направления перемещения. Оба сигнала через коммутаторы 13 и 14 подаются на распределитель 15, первый вход которого является информационным, а .второй - адресным. С выхода распределителя 15 производится включение привода 8 по выбранному направлению и перемещение сварочного инструмента 2,
В случае наезда датчика 1 касания на препятствие на выходе дискриминатора 3 вырабатывается сигнал, запускающий одновибратор 4. По фронту сигнала одновибратора 4 производится запись в триггеры 11 и 12 сигналов с выходов элементов 9 и ТО. На время действия сигнала одновибратора 4 коммутаторы 13 и 14 переключаются на передачу сигналов с выходов триггеров 11 и 12, причем сигнал на выходе первого триггера 11, характеризующий выбор данной координаты, передается в прямом коде, а сигнал на выходе второго триггера 12, характеризующий выбор направления перемещения, передается в обратном коде на входы коммутаторов 13 и 14.
Таким образом,если оператором не задействовано перемещение по какой- либо координате, то его нет и за время действия сигнала одновибратора 4. Нажатие кнопок по незадействованной прежде координате во время наличия .сигнала одновибратора 4 не вызывает никакой реакции устройства.„
Если же до наезда данная координата задействована, то на время дей- . ствия сигнала одновибратора 4 направление перемещения по данной координате обратно заданному. Нажатие кнопок в этот отрезок времени также.не ока- -зывает управляющего воздействия.По окончанию сигнала одновибратора 4 устройство, готово к продолжению обучения.
Таким образом, в случае наезда датчика 1 касания на препятствие, под воздействием сигнала от одновибрато- ра А в устройстве производится автоматическая блокировка перемещений по всем координатам, кроме тех, перемещение по которым привело к наезду, а по указанным координатам формируется сигнал для автоматического перемещения сварочного инструмента 2 в направлении, обратном направлению перемещения при наезде.
15 Благодаря тому, что на все время
отвода сварочного инструмента 2 из аварийной зоны управление приводами 8 перемещений производится автоматически, в устройстве полностью исключает-20 ся влияние оператора .на процесс ликвидации аварийной ситуации.
Устройство для программирования сварочных роботов обучением позволяет
значительно повысить надежность рабо- 25 входу логического блока, выход кото0
5
уменьшения времени вывода инструмента из аварийного положения. Формула изобретения
Устройство для программирования сварочных роботов обучением, содержащее установленный на инструменте датчик касания, подключенный к входу дискриминатора, пульт управления, подключенный к первому входу триггер- ного блока, и приводы перемещения инструмента,- отличающееся тем, что, с целью повышения производительности программирования путем автоматического вывода сварочного инструмента из зоны его наезда на поверхность свариваемого изделия, в него дополнительно введены одновибра- тор и логический блок, при этом вход одновибратора связан с выходом дискриминатора, а е.го выход связан с первым входом логического блока и вторым входом триггерного блока, выход триг- герного блока подключен к второму
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для предотвращения поломки сварочного инструмента | 1985 |
|
SU1263467A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для автоматического контроля процесса сварки | 1984 |
|
SU1238921A1 |
| Копировальное следящее устройство для станков с программным управлением | 1982 |
|
SU1070508A1 |
| Устройство для автоматического копирования линии сварного соединения | 1985 |
|
SU1318356A1 |
| Устройство управления укладчиком листового стекла | 1988 |
|
SU1551664A1 |
| Устройство для ввода учебной информации | 1990 |
|
SU1732369A1 |
| Стенд-тренажер для оценки качества задания программы перемещений манипулятора | 1987 |
|
SU1511111A1 |
| Устройство для программного управления промышленным роботом | 1987 |
|
SU1449272A1 |
| Установка для микросварки | 1991 |
|
SU1834770A3 |
Изобретение относится к технологии автоматической сварки и может быть применено при программировании сварочных работ обучением. Цель изобретения - повышение производительности программирования путем автоматического вывода сварочного инструмента из зоны его наезда на поверхность свариваемого изделия. Устройство содержит установленный на инструменте датчик касания, дискриминатор, триггерный блок, приводы перемещения сварочного инструмента, пульт управления, одновибратор и логический блок. В момент наезда одновременно блокируются приводы координатных перемещений, в направлении работы которых возможно свободное перемещение, и переключаются на обратный ход приводы, работа которых приводит к наезду. 2 ил.
ты и производительность программирования сварочных роботов вследствие
г
W
1
рого связан с входом щения инструмента.
привода перемеИ
И
6
gvguo
| Устройство для предотвращения поломки сварочного инструмента | 1985 |
|
SU1263467A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
