Изобретение относится к машиностроению, в частности к робототехнике, и может найти применение при выполнении работ на поверхностях с твердым покрытием.
Цель изобретения - снижение энергопотребления привода за счет уравновешивания опорных устройств.
На фиг.1 представлен мобильный
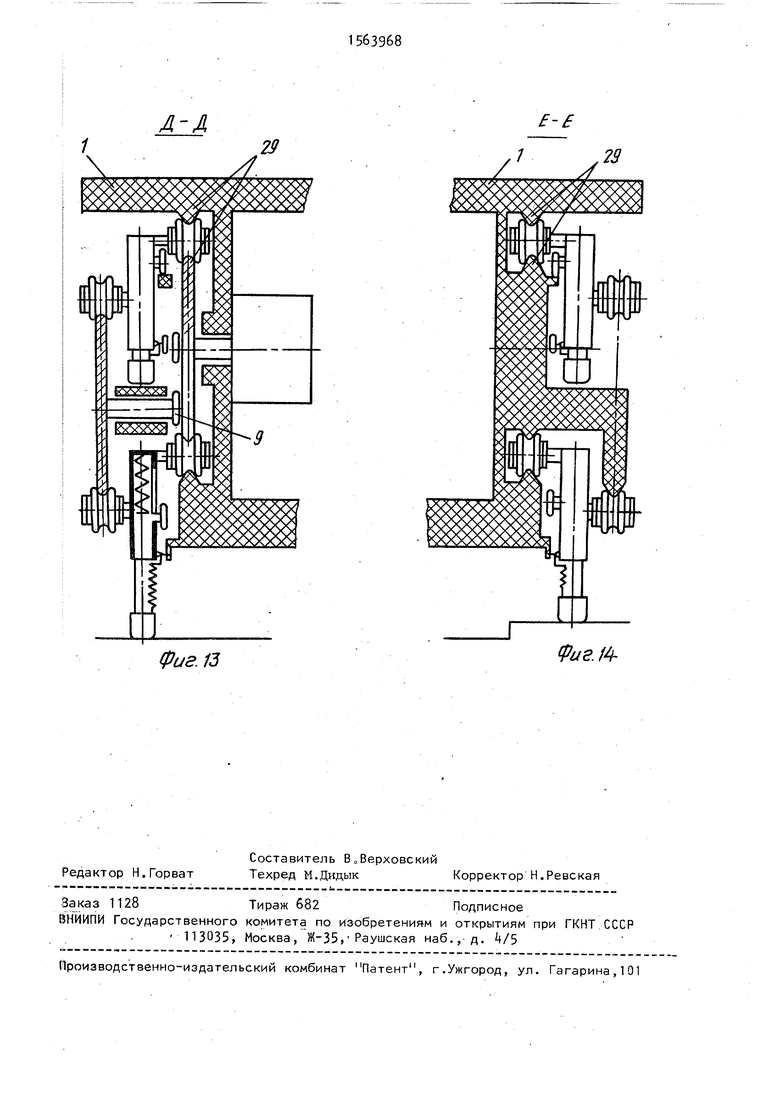
робот, общий вид; на фиг.2 - разрез А-А на фиг.1; на фиг.З - механизм фиксаций опорной стойки; на фиг. - вариант исполнения робота с шарнирным присоединением направляющих втулок опорных устройств; на фиг.З - разрез Б-Б на на фиг.6 - вариант исполнения робота с криволинейными опорными стойками опорных устройств; на фиг.7 - разрез В-В на фиг.6; на фиг.8 конструкция механизма фиксаций криволинейной опорной стойки; на фиг.9 вариант исполнения робота с дополнительными ходовыми направляющими; на фиг.10 - разрез Г-Г на фиг.9; на фиг.11 - механизм фиксации опорной стойки с дополнительными роликами; на фиг,12 - конструкция робота с дополнительными замкнутыми гибкими элементами; на фиг.13 - разрез Д-Д на фиг.12; на фиг.1 - разрез Е-Е на фиг„12.
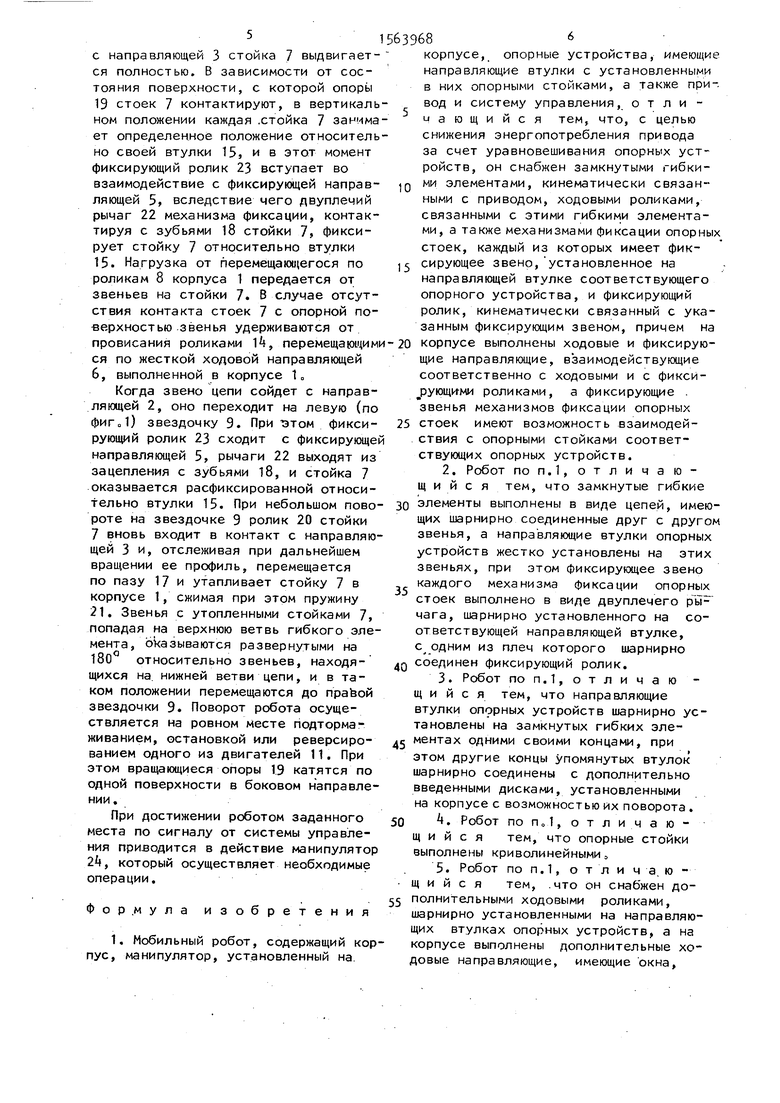
Мобильный робот содержит корпус 1 с направляющими 2-6, опорные телескопические стойки 7 опорных устройств, замкнутые гибкие элементы, выполненные в виде цепей с ходовыми роликами
8,взаимодействующих со звездочками
9,установленными на валах 10 корпуса 1 и приводимыми во вращение двига- телями 11 привода, и систему управления (не показана). Бесконечные
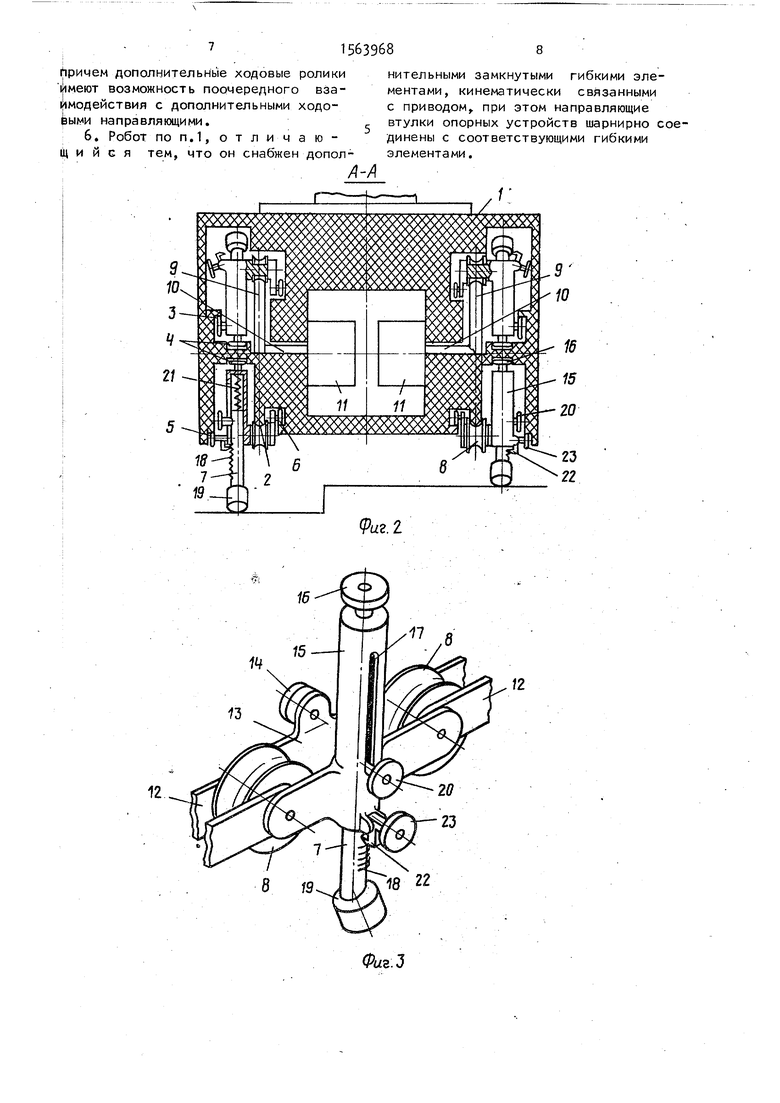
цепи образованы звеньями: пластинами 12 и 13, содержащими ролики 1, кон- тактирующие с ходовой направляющей 6, направляющие втулки 15 с торцовыми роликами 16 и пазами 17. Опорные телескопические стойки 7 установлены внутри втулок 15 и снабжены зубьями 189 вращающимися опорами 19 и механи3 мами вертикального перемещения, кажды из которых включает ролик 20, взаимодействующий с направляющей 3 и за- . крепленный на стойке 7 таким образом, что ось его проходит через паз 17 и пружину 21, с помощью которой стойка 7 подпружинена относительно втулки 15° Каждая опорная стойка 7 имеет свой механизм фиксации, включающий
Q
5
5
фиксирующее звено, - закрепленный на втулке 15 двуплечий рычаг 22, контактирующий с зубьями 18 стойки 7 и снабженный фиксирующим роликом 23, установленным с возможностью взаимодействия с фиксирующей направляющей 5. На корпусе 1 установлен манипулятор , включающий подвижные звенья, а сам корпус 1 опирается направляющими 2 на ролики 8, находящиеся на нижней ветви бесконечной цепи, усилие с которых передается через втулки 15, рычаги 22, стойки 7 и опоры 19 на опорную поверхность. Боковому смещению стоек 7 препятствуют реборды роликов 8 и ролики 16, взаимодействующие с направляющей А„
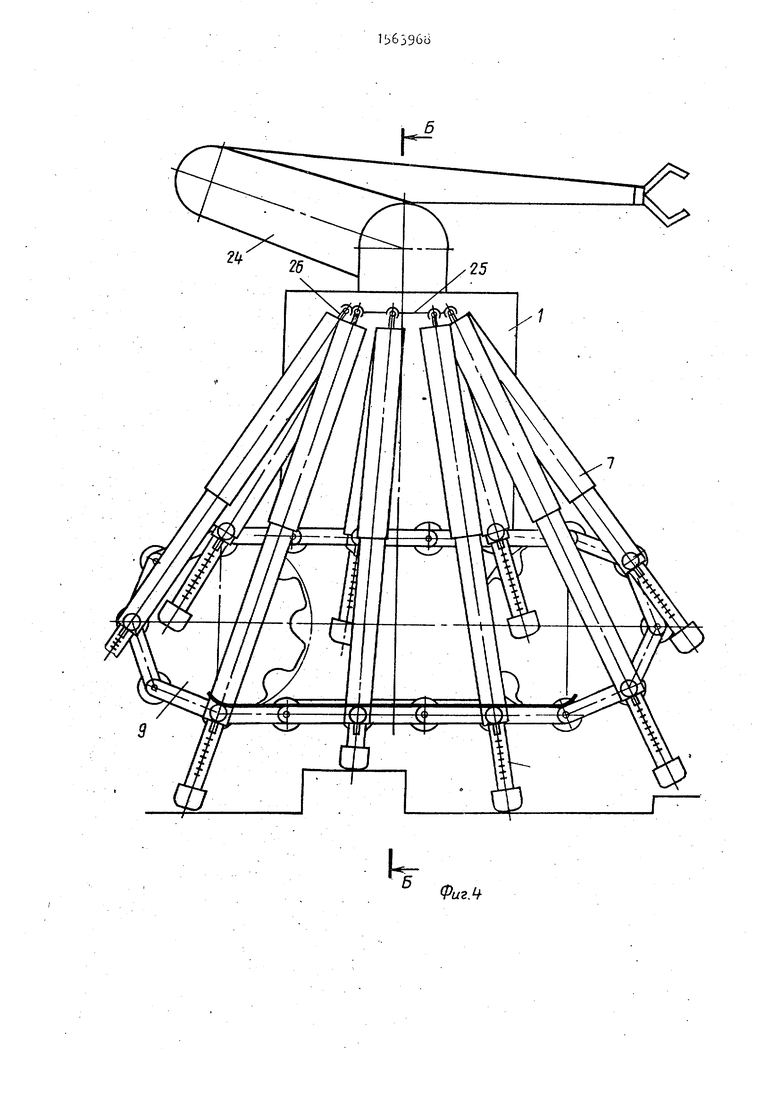
В случае исполнения робота с шарнирным присоединением направляющих втулок опорных устройств (фиг.4) диски 25, установленные на корпусе робота с возможностью поворота, имеют шарниры 26, крепящие концы втулок.
Опорные стойки 7 опорных устройств могут быть выполнены криволинейными (фиг.6). Для улучшения условий работы опорных устройств робот может быть снабжен дополнительными ходовыми роликами 27 и 28 (фиг.9), а также дополнительными ходовыми направляющими 29, имеющими окна 30 для прохода роликов 27 и 28.
Робот может быть также снабжен дополнительными замкнутыми гибкими элементами 31, также кинематически связанными с приводом.
Мобильный робот работает следующим образом.
При включении двигателей 11 привода крутящий момент через валы 10 передается на звездочки 9, приводящие в движение замкнутые гибкие элементы, состоящие из пластин 12 и 13. Корпус 1 робота своими ходовыми направляющими 2 перемещается по роликам 8, а ролики 16 звеньев перемещаются по направляющей , Каждое звено верхней ветви цепи, попадая на правую (фиг.1) звездочку 9, разворачивается, ролик 20 при этом перемещается по направляющей 3 которая в зоне звездочки 9 спрофилирована таким образом, что, отслеживая ее профиль, ролик 20 одновременно перемещается по пазу 17, освобождая пружину 21, под действием которой стойка 7 выдвигается из втулки 15. После выхода ролика 20 из взаимодействия
с направляющей 3 стойка 7 выдвигает- ся полностью. В зависимости от состояния поверхности, с которой опоры 19 стоек 7 контактируют, в вертикальном положении каждая .стойка 7 занимает определенное положение относительно своей втулки 15, ив этот момент фиксирующий ролик 23 вступает во взаимодействие с фиксирующей направляющей 5, вследствие чего двуплечий рычаг 22 механизма фиксации, контактируя с зубьями 18 стойки 7, фиксирует стойку 7 относительно втулки 15. Нагрузка от перемещающегося по роликам 8 корпуса 1 передается от звеньев на стойки 7. 8 случае отсутствия контакта стоек 7 с опорной поверхностью звенья удерживаются от
10
15
корпусе, опорные устройства, имеющие направляющие втулки с установленными в них опорными стойками, а также привод и систему управления, о т л и - мающийся тем, что, с целью снижения энергопотребления привода за счет уравновешивания опорных устройств, он снабжен замкнутыми гибкими элементами, кинематически связанными с приводом, ходовыми роликами, связанными с этими гибкими элементами, а также механизмами фиксации опорных стоек, каждый из которых имеет фиксирующее звено, установленное на направляющей втулке соответствующего опорного устройства, и фиксирующий ролик, кинематически связанный с указанным фиксирующим звеном, причем на
25
30
35
провисания роликами 14, перемещающими-20 корпусе выполнены ходовые и фиксирую- ся по жесткой ходовой направляющей 6, выполненной в корпусе 1„
Когда звено цепи сойдет с направляющей 2, оно переходит на левую (по фиг) звездочку 9. При этом фиксирующий ролик 23 сходит с фиксирующей направляющей 5, рычаги 22 выходят из зацепления с зубьями 18, и стойка 7 оказывается расфиксированной относительно втулки 15. При небольшом повороте на звездочке 9 ролик 20 стойки 7 вновь входит в контакт с направляющей 3 и, отслеживая при дальнейшем вращении ее профиль, перемещается по пазу 17 и утапливает стойку 7 в корпусе 1, сжимая при этом пружину 21. Звенья с утопленными стойками 7, попадая на верхнюю ветвь гибкого элемента, оказываются развернутыми на 180° относительно звеньев, находящихся на нижней ветви цепи, и в таком положении перемещаются до правой звездочки 9. Поворот робота осуществляется на ровном месте подтерма- живанием, остановкой или реверсированием одного из двигателей 11. При этом вращающиеся опоры 19 катятся по одной поверхности в боковом направлении.
При достижении роботом заданного места по сигналу от системы управления приводится в действие манипулятор 2k, который осуществляет необходимые операции.
щие направляющие, взаимодействующие соответственно с ходовыми и с фикси- рующи-ми роликами, а фиксирующие звенья механизмов фиксации опорных стоек имеют возможность взаимодействия с опорными стойками соответствующих опорных устройств.
2.Робот по п.1, отличающий с я тем, что замкнутые гибкие элементы выполнены в виде цепей, имеющих шарнирно соединенные друг с другом звенья, а направляющие втулки опорных устройств жестко установлены на этих звеньях, при этом фиксирующее звено каждого механизма фиксации опорных стоек выполнено в виде двуплечего рычага, шарнирно установленного на соответствующей направляющей втулке,
с одним из плеч которого шарнирно 4Q соединен фиксирующий ролик.
3.Робот поп.1,отличаю щ и и с я тем, что направляющие втулки опорных устройств шарнирно установлены на замкнутых гибких эле45 ментах одними своими концами, при этом другие концы упомянутых втулок шарнирно соединены с дополнительно введенными дисками, установленными на корпусе с возможностью их поворота.
4.Робот по По1, отличающий с я тем, что опорные стойки выполнены криволинейными о
5.Робот поп.1, отличаю50
щ и и с я тем, .что он снабжен до- 55 полнительными ходовыми роликами,
Фор.мула изобретения
1. Мобильный робот, содержащий корпус, манипулятор, установленный на
корпусе, опорные устройства, имеющие направляющие втулки с установленными в них опорными стойками, а также привод и систему управления, о т л и - мающийся тем, что, с целью снижения энергопотребления привода за счет уравновешивания опорных устройств, он снабжен замкнутыми гибкими элементами, кинематически связанными с приводом, ходовыми роликами, связанными с этими гибкими элементами, а также механизмами фиксации опорных стоек, каждый из которых имеет фиксирующее звено, установленное на направляющей втулке соответствующего опорного устройства, и фиксирующий ролик, кинематически связанный с указанным фиксирующим звеном, причем на
корпусе выполнены ходовые и фиксирую-
щие направляющие, взаимодействующие соответственно с ходовыми и с фикси- рующи-ми роликами, а фиксирующие звенья механизмов фиксации опорных стоек имеют возможность взаимодействия с опорными стойками соответствующих опорных устройств.
2.Робот по п.1, отличающий с я тем, что замкнутые гибкие элементы выполнены в виде цепей, имеющих шарнирно соединенные друг с другом звенья, а направляющие втулки опорных устройств жестко установлены на этих звеньях, при этом фиксирующее звено каждого механизма фиксации опорных стоек выполнено в виде двуплечего рычага, шарнирно установленного на соответствующей направляющей втулке,
с одним из плеч которого шарнирно соединен фиксирующий ролик.
3.Робот поп.1,отличаю щ и и с я тем, что направляющие втулки опорных устройств шарнирно установлены на замкнутых гибких элементах одними своими концами, при этом другие концы упомянутых втулок шарнирно соединены с дополнительно введенными дисками, установленными на корпусе с возможностью их поворота.
4.Робот по По1, отличающий с я тем, что опорные стойки выполнены криволинейными о
5.Робот поп.1, отличаю
щ и и с я тем, .что он снабжен до- полнительными ходовыми роликами,
шарнирно установленными на направляющих втулках опорных устройств, а на корпусе выполнены дополнительные ходовые направляющие, имеющие окна,
причем дополнительные ходовые ролики имеют возможность поочередного взаимодействия с дополнительными ходовыми на п ра вля ющи ми.
6. Робот по п.1,отличающий с я тем, что он снабжен дополнительными замкнутыми гибкими элементами, кинематически связанными с приводом,, при этом направляющие втулки опорных устройств шарнирно соединены с соответствующими гибкими элементами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мобильный робот | 1988 |
|
SU1662834A1 |
| Мобильный робот | 1989 |
|
SU1669711A2 |
| Веломобиль | 1989 |
|
SU1702869A3 |
| КАНТОВАТЕЛЬ | 1998 |
|
RU2129087C1 |
| АВТОМОБИЛЬ | 2006 |
|
RU2311312C2 |
| АГРЕГАТНЫЙ ДЕРЕВООБРАБАТЫВАЮЩИЙ СТАНОК И НАСАДКА К НЕМУ | 1999 |
|
RU2161554C1 |
| Устройство для ультразвукового контроля сварных швов труб | 1984 |
|
SU1165979A1 |
| Устройство для намотки полосового материала | 1980 |
|
SU990366A1 |
| ПАЛАТКА (ВАРИАНТЫ) | 2003 |
|
RU2238383C1 |
| КУЛЬТИВАТОР | 1995 |
|
RU2090025C1 |
Изобретение относится к машиностроению и может быть использовано при выполнении работ на поверхностях с твердым покрытием. Цель изобретения - снижение энергопотребления привода за счет уравновешивания опорных устройств. Робот содержит корпус 1, манипулятор 24, установленный на корпусе, опорные устройства, имеющие опорные стойки 7. При подаче сигнала от системы управления роботом включается привод, приводящий в действие замкнутые гибкие элементы, кинематически связанные с ним. При этом ходовые ролики 8, связанные с гибкими элементами, катятся по ходовым направляющим, выполненным на корпусе. Опорные стойки 7 выдвигаются из направляющих втулок 15 опорных устройств. Затем включаются в работу механизмы фиксации опорных стоек, каждый из которых имеет фиксирующее звено и фиксирующий ролик 23, взаимодействующий с фиксирующими направляющими 5, выполненными на корпусе. Фиксирующее звено этого механизма воздействует на соответствующую опорную стойку и фиксирует ее в направляющей втулке. Таким образом происходит перемещение корпуса 1 робота к месту выполнения работ. Затем по сигналу системы управления включается манипулятор, выполняющий требуемые операции. Замкнутые гибкие элементы могут быть выполнены в виде цепей, на звеньях которых шарнирно установлены одними концами направляющие втулки, а другие концы этих втулок шарнирно соединяются с дополнительно введенными дисками. Опорные стойки могут быть выполнены криволинейными. 5 з.п.ф-лы, 14 ил.
14
Фиг. 2.
Фиг.З
-г
П)
Г
91
9-3
89бЈ9 1
(Риг. 7
(Риг. 8
U zr(t)
Я9бЈ9 1
Л-А
Фиг. /J
Ј-Ј
Фиг. /4
| Робототехника | |||
| - Экспресс-информация ВИНИТИ, 1986, № 7, с„ 9, рис | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
