ния, направляющие 16 изгибаются, при-JQ ханизмами, а другие концы шарнирно нимая дугообразную форму, вместе с ними изменяют свою форму и замкнутые
связаны с соответствующими направля ющими, которые выполнены из упругог материалао
гибкие элементы 6, взаимодействующие с гибкими направляющими 16„ Под действием тех же тяг 15 кронштейны 29 поворачиваются относительно корпуса 1, разворачивая и элементы привода 5 звездочки 7, что обеспечивает нормальную работу замкнутых гибких элементов 5о В результате изменения положения (конфигурации) гибких элементов 6 изменяется и расстояние между точкой контакта опорной стойки 4 с опорной поверхностью и корпусом 1, что и обеспечивает поворот робота.
Достигая таким образом места, где необходимо выполнение определенного вида работ, по команде от системы управления включается манипулятор 2 и производит необходимые операции
Формула изобретения
1. Мобильный робот по авто св0 # 1563968, отличающийся тем, что, с целью повышения надежности его перемещения по криволинейным траекториям за счет улучшения динамиханизмами, а другие концы шарнирно
5
0
5
0
5
связаны с соответствующими направляющими, которые выполнены из упругого материалао
2. Робот по По 1, отличающий с я тем, что направляющие втулки опорных устройств имеют возможность поворота в плоскости, перпендикулярной плоскости замкнутого гибкого элемента с
Зс Робот по п. отличающийся тем, что стойки опорных устройств снабжены опорными площадками, смещенными относительно продольной оси этих стоек, а сами стойки имеют возможность поворота относительно направляющих втулок0
4о Робот по По отличающийся тем, что он снабжен дополнительными направляющими, жестко закрепленными на замкнутых гибких элементах, при этом направляющие втулки опорных устройств -расположены на этих направляющих 0
5о Робот по п„ 1, отличающийся тем, что направляющие, выполненные из упругого материала, имеют возможность взаимодействия с соответствующими замкнутыми гибкими элементами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мобильный робот | 1988 |
|
SU1563968A1 |
| Мобильный робот | 1988 |
|
SU1662834A1 |
| Инвалидная коляска | 1988 |
|
SU1629058A1 |
| Веломобиль | 1989 |
|
SU1702869A3 |
| АВТОМОБИЛЬ | 2006 |
|
RU2311312C2 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ДВИЖЕНИЯ НАГРУЖЕННОГО МОБИЛЬНОГО РОБОТА ПРИ НАЛИЧИИ ПРОСКАЛЬЗЫВАНИЯ КОЛЁС | 2017 |
|
RU2670352C1 |
| ИНВАЛИДНАЯ КОЛЯСКА С ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2085166C1 |
| ШАССИ МОБИЛЬНОГО ТРАНСПОРТНОГО ОБОРУДОВАНИЯ | 2004 |
|
RU2291811C2 |
| Тренажёр для вейкборда | 2022 |
|
RU2772192C1 |
| АВТОНОМНОЕ ТРАНСПОРТНОЕ СРЕДСТВО, ТАКОЕ КАК АВТОМАТИЧЕСКИ УПРАВЛЯЕМОЕ ТРАНСПОРТНОЕ СРЕДСТВО ИЛИ АВТОНОМНЫЙ МОБИЛЬНЫЙ РОБОТ | 2019 |
|
RU2779749C1 |
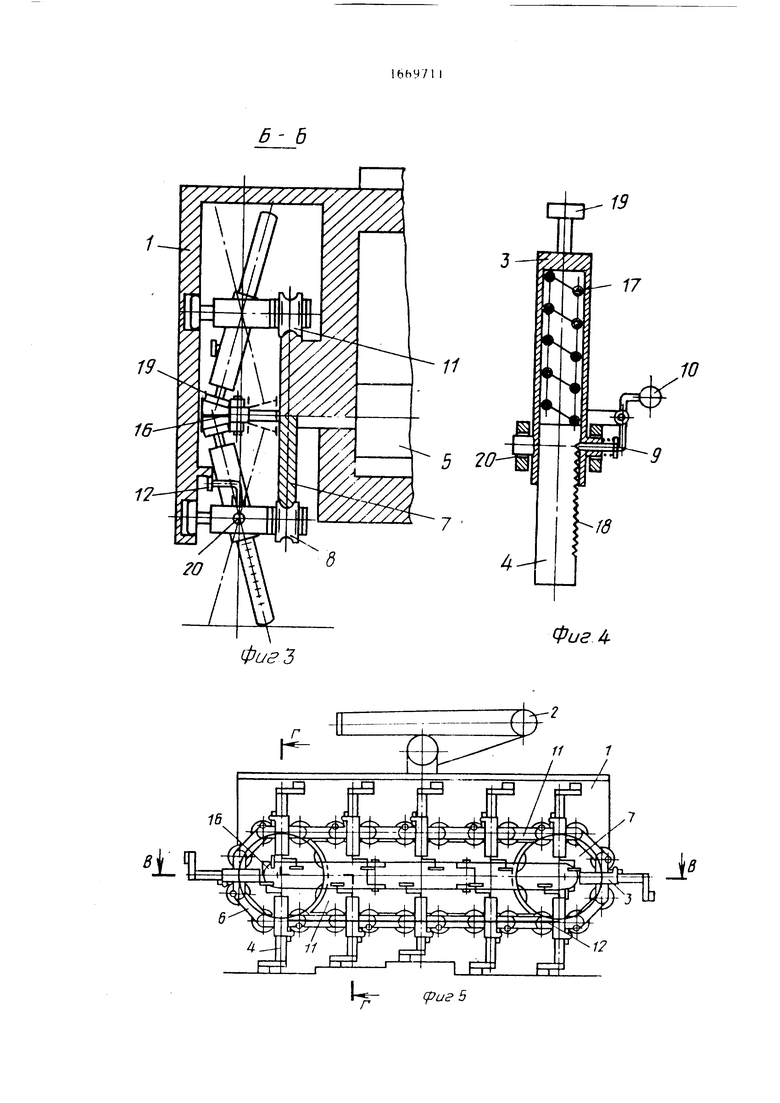
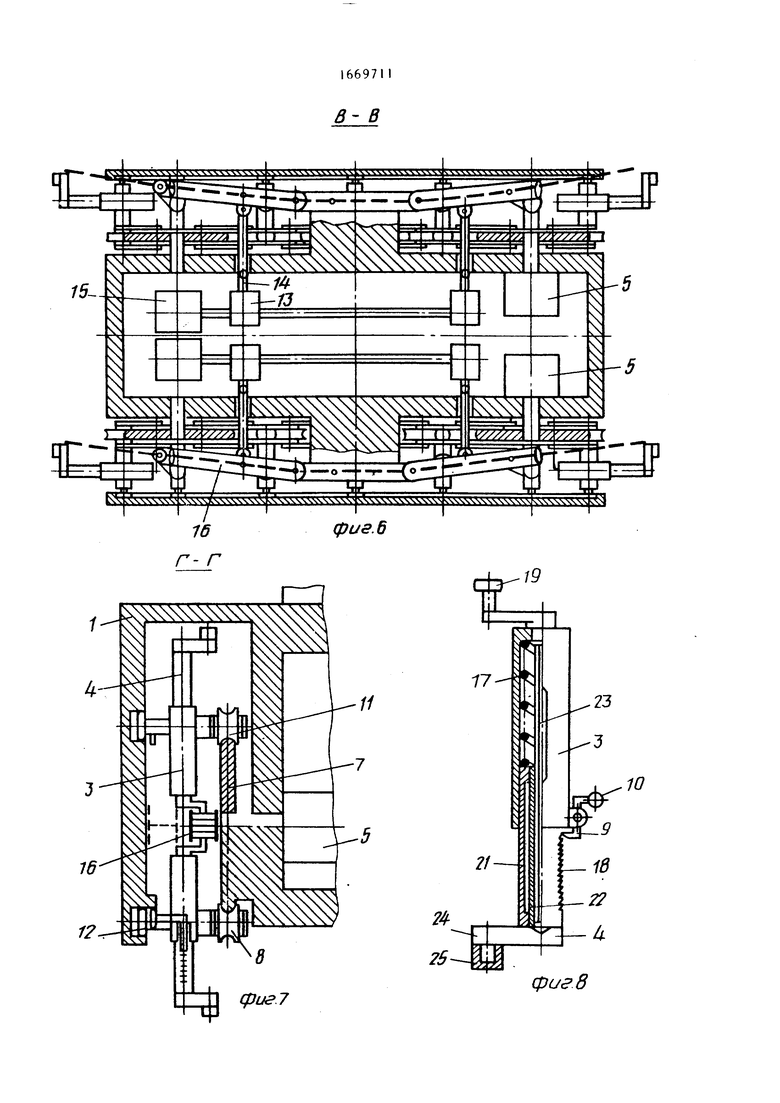
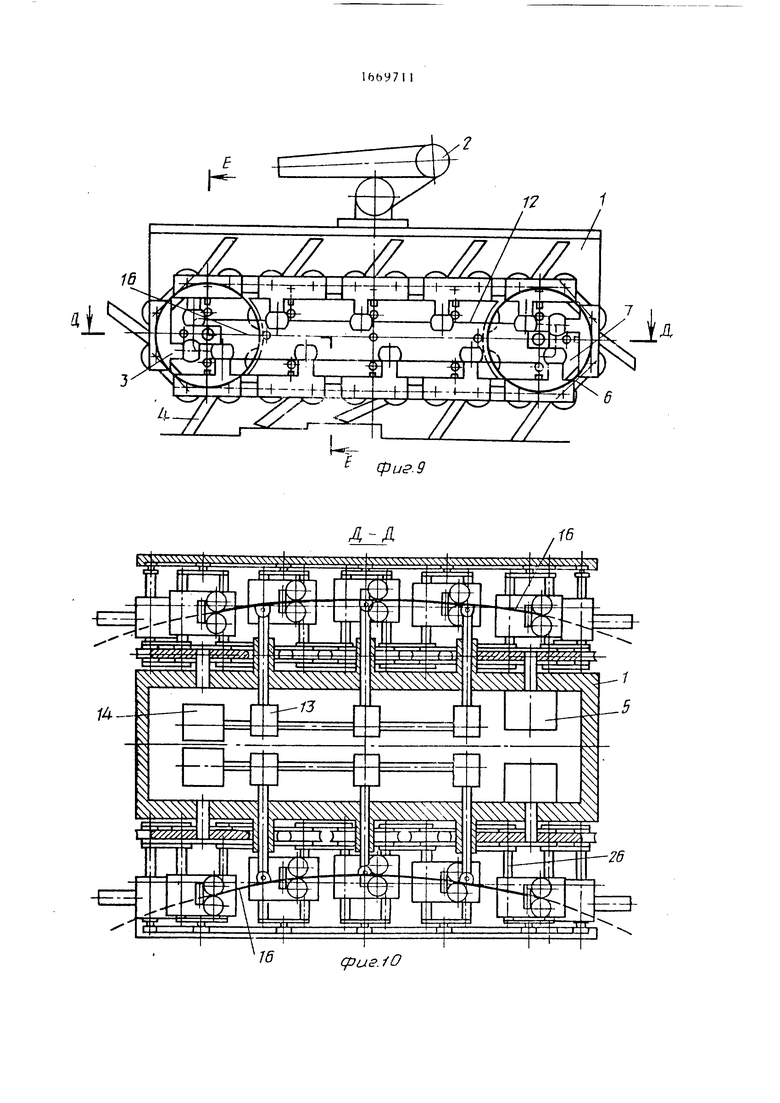
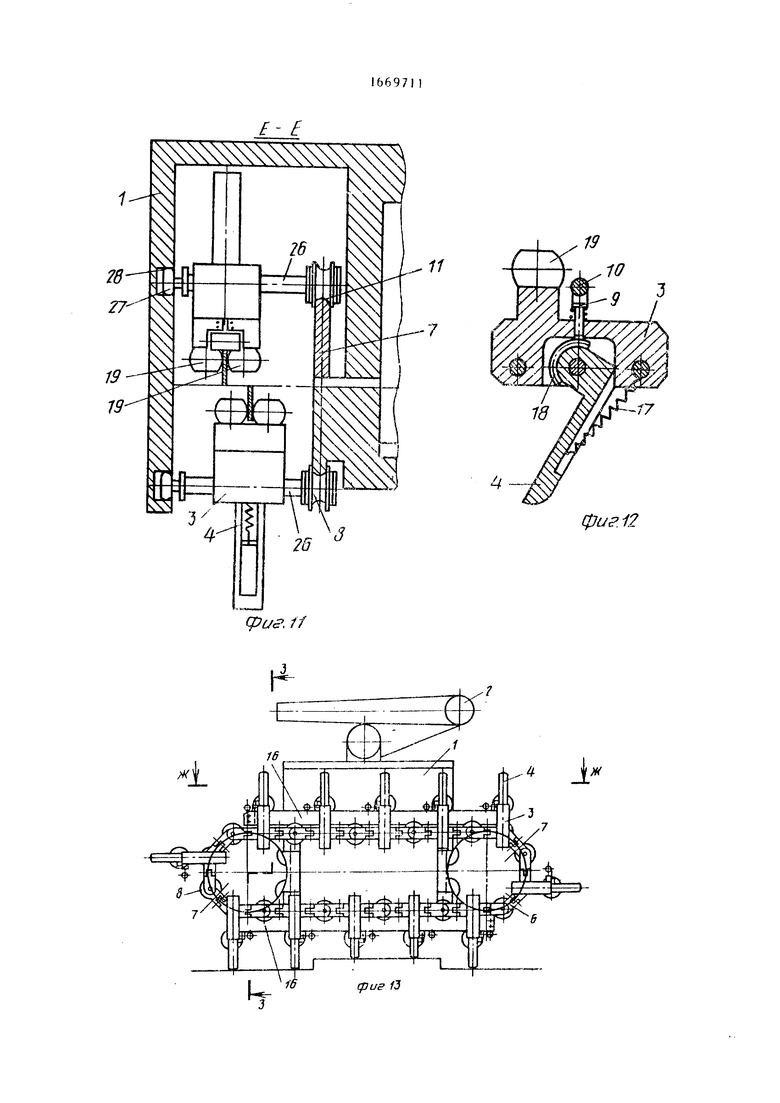
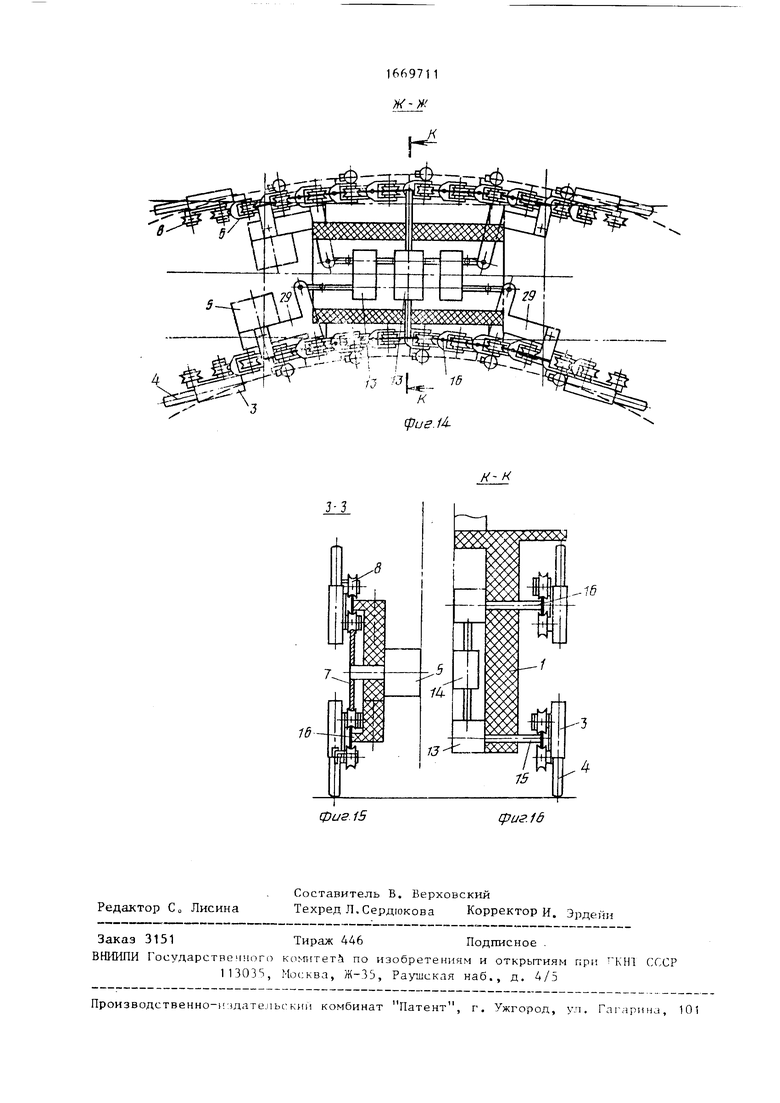
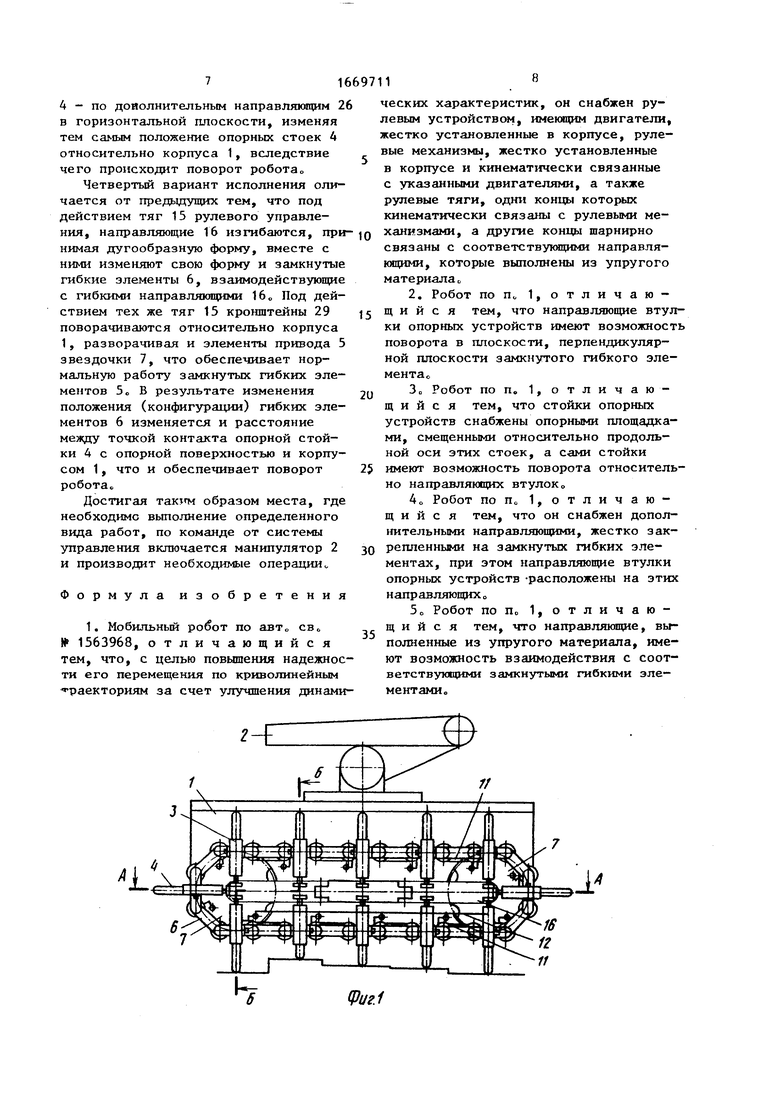
Изобретение относится к машиностроению, в частности к робототехнике. Цель изобретения - повышение надежности его перемещения по криволинейным траекториям за счет улучшения динамических характеристик. Мобильный робот содержит корпус, на котором установлен манипулятор, опорные устройства, а также привод 5 и систему управления. Для доставки манипулятора в зону выполнения работ приводятся в движение замкнутые гибкие элементы. При необходимости движения по криволинейным траекториям включаются двигатели 14 рулевого устройства, приводящие в движение рулевые механизмы 13, которые воздействуют рулевыми тягами 15 на направляющие 16, выполненные из упругого материала. При этом опорные устройства поворачиваются на некоторый угол, изменяя тем самым положение опорных стоек, в результате чего происходит поворот корпуса устройства. Опорные стойки могут быть снабжены опорными площадками, смещенными относительно их продольной оси, а на замкнутых гибких элементах жестко закреплены дополнительные направляющие, в которых расположены направляющие втулки опорных устройств. После выключения привода 5 включается в работу манипулятор, выполняющий требуемые технологические операции. 4 з.п.ф-лы, 16 ил.
11
Фиг.1
i7 ЗПф
-01 9
//
61
l/h4QI
Јгпф
и
q ,g
166971
в- в
фие.д
Г- Г
фиг 8
y.
К Ч Ч чЧ Ч ч У Х К УчЧ ЧУчЛЧЧ 1О;К ХХ%дК
5&6/Ј.
Ј -/Ј
;-тнрт т
trl .L
±7
А-Л
Гб
f- E
(риг, 11
j
4
фиг.12
J-3
фиг 14
