1
(21)4477016/25-08
(22)230888
(46) 300590 Бюл № 20
(71)Всесоюзный научно-исследовательский, проектно-конструкторский и технологический институт электросварочного оборудования
(72)Б Е Корда те нко
(53)621 22972(0888)
(56)Авторское свидетельство СССР № 874332, кл В 25 Л 13/00, 1979
(54)УРАВНОВЕШЕННЫЙ МАНИПУЛЯТОР
(57)Изобретение относится к машиностроению и предназначено для использования в конструкциях, содержащих вращающиеся звенья Цель изобретения - повышение безопасности в работе за счет уменьшения потенциальной энергии пружин Манипулятор
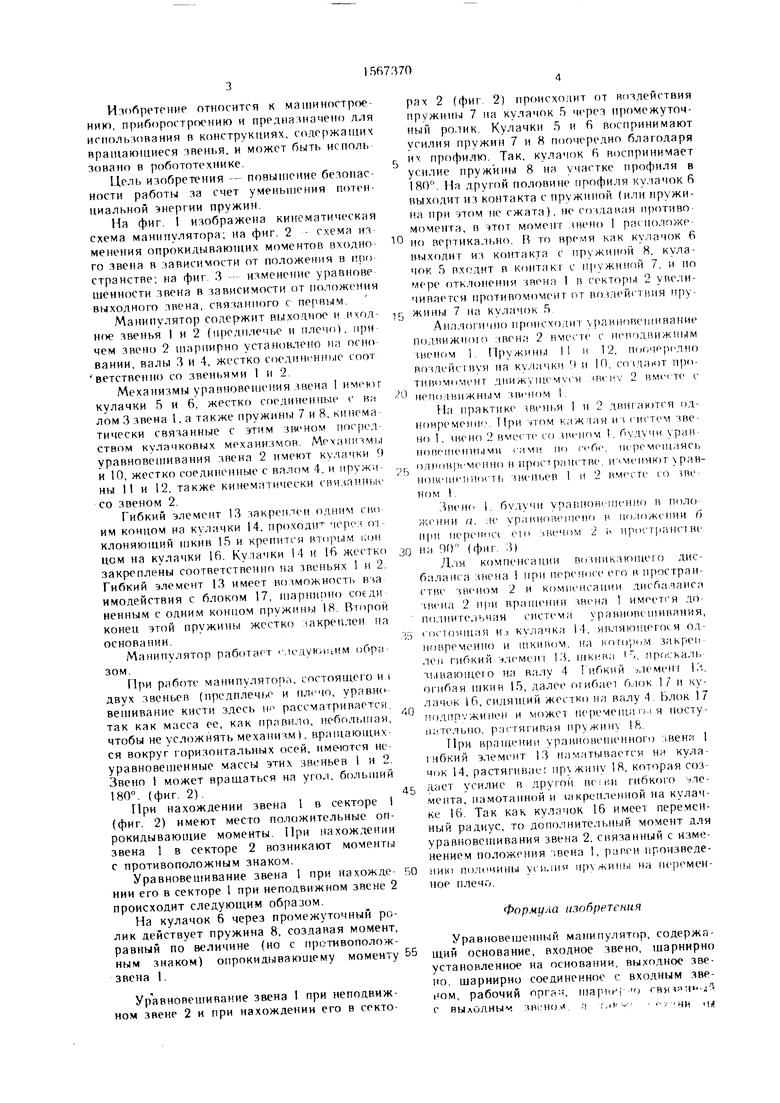
содержит основание, шарнирно соединенные звенья 1 и 2, механизмы уравновешивания звеньев, имеющие основные пружины 7, 8, II и 12, кинематически связанные с соответствующими звеньями При перемещении звеньев 1 и 2 в пространстве происходит их поворот на валах 3 и 4 Одновременно поворачиваются кулачки 14 и 16, жестко закрепленные на валах звеньев 1 и 2. Поворот кулачков приводит к перемещению блока 17, так как на кулачках жестко закреплены концы гибкого элемента 13, который имеет возможность взаимодействия с блоком 17. Перемещение блока приводит к деформации дополнительной пружины 18, один конец которой закреплен на оснований, а другой шарнирно соединен с блоком 17 В результате деформации пружины возникает усилие, уравновешивающее звенья 1 и 2. 3 ил.
(/
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1988 |
|
SU1537518A1 |
| Уравновешенный манипулятор | 1987 |
|
SU1491698A1 |
| Механизм уравновешивания манипулятора | 1987 |
|
SU1511112A1 |
| Манипулятор | 1980 |
|
SU929430A1 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| Манипулятор | 1981 |
|
SU1013257A2 |
| Уравновешенный манипулятор | 1991 |
|
SU1813621A1 |
| Манипулятор | 1986 |
|
SU1380927A1 |
| Манипулятор | 1991 |
|
SU1774914A3 |
| Захват манипулятора | 1979 |
|
SU837855A1 |
Изобретение относится к машиностроению и предназначено для использования в конструкциях, содержащих вращающиеся звенья. Цель изобретения - повышение безопасности в работе за счет уменьшения потенциальной энергии пружин. Манипулятор содержит основание, шарнирно соединенные звенья 1 и 2, механизмы уравновешивания звеньев, имеющие основные пружины 7, 8, 11, 12, кинематически связанные с соответствующими звеньями. При перемещении звеньев 1 и 2 в пространстве происходит их поворот на валах 3 и 4. Одновременно поворачиваются кулачки 14 и 16, жестко закрепленные на валах звеньев 1 и 2. Поворот кулачков приводит к перемещению блока 17, так как на кулачках жестко закреплены концы гибкого элемента 13, который имеет возможность взаимодействия с блоком 17. Перемещение блока приводит к деформации дополнительной пружины 18, один конец которой закреплен на основании, а другой шарнирно соединен с блоком 17. В результате деформации пружины возникает усилие, уравновешивающее звенья 1 и 2. 3 ил.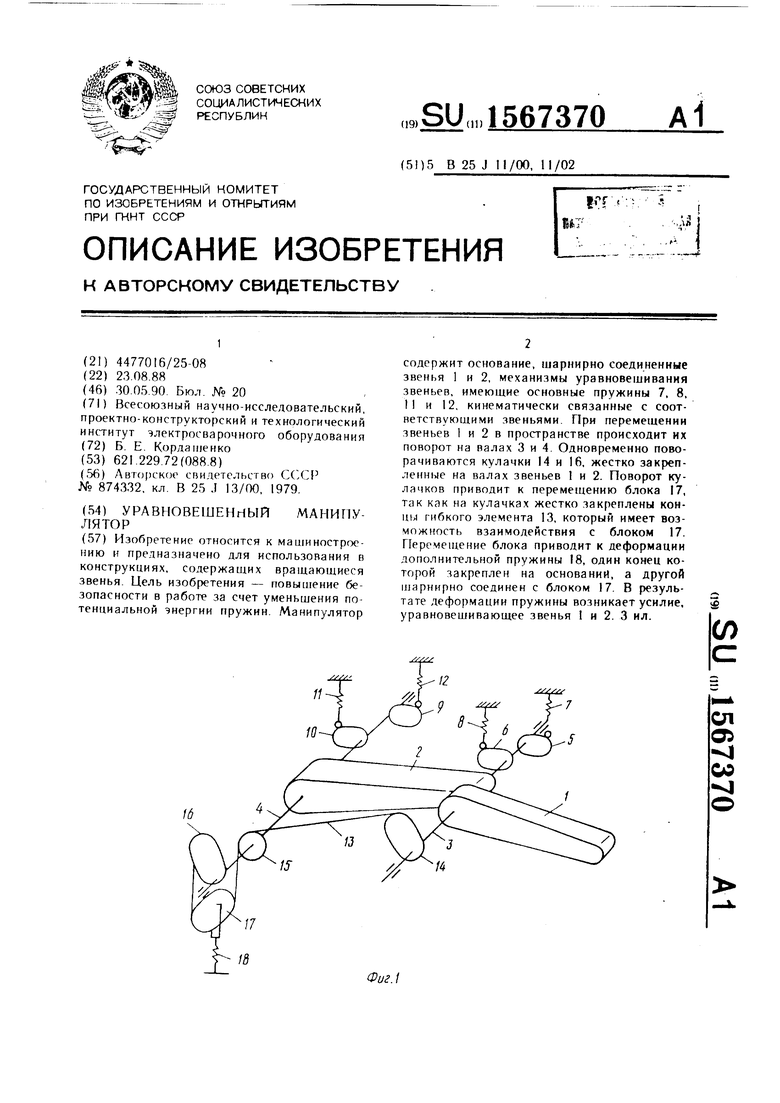
ел
о J
00
1
Фиг.
И зобретение относится к машинострое нию, приборостроению и предназначено для использования в конструкциях, содержащих вращающиеся звенья, и может быть исполь зовано в робототехнике
Цель и зобретения - повышение безопас ности работы за счет уменьшения потен циальной энергии пружин
На фиг 1 изображена кинематическая схема манипулятора, на фиг 2 cvevia in менения опрокидывающих моментов входно го звена в зависимости от положения в про странстве, на фиг 3 изменение уравнове шенности звена в зависимости от почожения выходного звена, связанного с первым
Манипулятор содержит выхочное и
ное звенья I и 2 (предплечье и плечо) при
чем звено 2 шарнирно установлено на осип
вании, валы 3 и 4, жестко соединенные соог
ветствснно со звеньями 1 и 2
Механи шы уравновешения звена 1 имеют кулачки 5 и 6, жестко соединенные с ва лом 3 звена 1, а также пружины 7 и 8. кинема тически связанные с этим звеном по ре 1 ством кулачковых механизмов Механизмы уравновешивания звена 2 имеют кучачки О и 10, жестко соединенные с валом 4 и пруж-г ны 11 и 12, также кинематически связанны со звеном 2
Гибкий элемент 13 закрещен очним с во им концом на кулачки 14, проходи oi клоняющий шкив 15 и крепится вторым кон цом на кулачки 16 Клпачки 1 I и 16 жестко закреплены соответственно на звеньях 1 и 2 Гибкий элемент 13 имеет возможность в за имодейстния с блоком 17, шарнипно икди ненным с одним конном пружины 18 Второй конец этой пружины жестко закреплен на основании
Манипулятор работает ie ivK/i .им обра зом
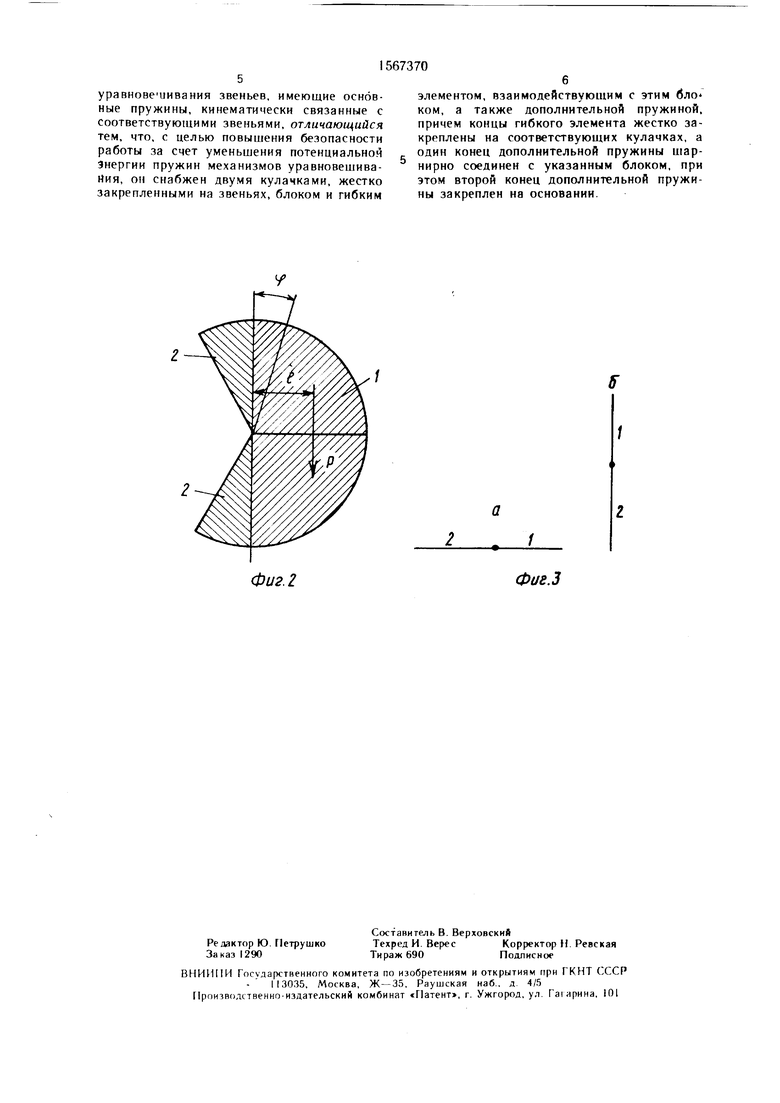
При работе манипулятору состоящею ni двух звеньев (предплечье и , ура вне вешивание кисти здесь н- рассматривается так как масса ее, как правило, небольшая, чтобы не усложнять механизм), вращающих ся вокруг горизонтальных осей, имемотея не уравновешенные массы этих звеньев 1 и 2 Звено 1 может вращаться на угол, больший 180° (фиг 2)
При нахождении звена 1 в секторе 1 (фиг 2) имеют место попечительные опрокидывающие моменты При нахождении звена 1 в секторе 2 возникают моменты с противоположным знаком
Уравновешивание звена 1 при нахожде нии его в секторе 1 при неподвижном звене 2 происходит следующим образом
На кулачок 6 через промежуточный ролик действует пружина 8, создавая момент, равный по величине (но с противоположным знаком) опрокидывающему моменту звена I
Уравновешивание звена I при неподвижном звене 2 и при нахождении его в секто
5
0
5
pax 2 (фи 2) происходит от воздействия пружины 7 на кулачок 5 через промежуточный ротик Кулачки 5 и 6 воспринимают усилия пружин 7 и 8 поочередно благодаря 5 и профилю Так, кулачок 6 воспринимает усилие пружины 8 на частке профиля в 180° На другой половине профиля KV шчок 6 выходит из контакта с пружиной (ипи пружина при JTOM не сжата), не союзная противо момента, в этот момент звено 1 располо/хе 0 не) вертикально В то время как к шчок 6 выходит и; контакта с пружиной 8. кула чок 5 входит в коптам с пружиной 7 и по мере (пк точения звена 1 в секторы 2 VBC.IH чивается противомомент л вопей шия пру жины 7 на кулачок 5
Ана нмично происхо uu уравновешивание ПО1НИЖНОЮ шена 2 вмсчте с неподвижным звеном 1 Пружины II и 12, пос.чер ччо возтл йс i вуя на ку ычкн Ч и 10 соиыют при тивомоменг Т.ВИЖНИС муе я пни, 2 BMI те с непо шижным звеном 1
На практике звенья 1 и 2 читаются от. повремени 1 При -тж i-аж ыя и i зве но 1 звено 2 вмсч тс со зш ном I бу ичи урав повешенными по « бе перемещусь о moBpi мс нно в прек раш тве и меняю г у рав- новсшш .ми ть звеньев I и 2 вмсч тс со зве ном
Звено I будучи УСТИНОВ шенно в пою женин и (о уравновешено в поюжснни 6 при перенпсс е.п зьечом 2 при транс пк
()0 (фиг 3)
Д.1Я компенсации возникающего ди баланса звена 1 при переносе его внросгран с тв звеном 2 и компенсации тисбапанса ни 2 при вращении звена 1 имеет я чо по 1ниге.1ьчая система уравновешивания, 11нтоящая и 5 кулачка 11 являющекия oi новременне) и шкивом на когорил закреп лен гибкий э1емсн 1 3, шкшза про ка п зываюшею на валу 4 I ибкий -к мен г 1 ч, О1ибчя шкив 15, далее шибает б юн 17 и к у лачок 10, сидящий жестко на вялу 4 Блок 17 поапоужинен и можем перемета i я посту iU Teibno ркгятипая пружину 18
При вращении уравновешенной) ,вена 1 1чбкий элемент 13 нам зтьпзаетс я на кула чок 14, растямшае1 пружину 18, которая соз даем усилие в друюи ве ни гиокою ie мента, намотанной и закрепленной на кулач ке lfc Так как кулачок 16 имеет переменный радиус, то дополнительный момент для уравновешивания звена 2, связанный с и зме нением положения ,вена 1, рагч Н произведению поче чины усилия пружины ы пе ремен ное плечо
Формула изобретения
Уравновешенный манипулятор, содержа щий основание, входное звено, шарнирно установленное на основании, выходное звено шарнирно соединенное с входным звеном, рабочий орган, шарни| ч связям
С ВЫХОДНЫЕ ХВ НОИ i I ( . НИ Hf
0 на
уравновешивания звеньев, имеющие основные пружины, кинематически связанные с соответствующими звеньями, отличающийся тем, что, с целью повышения безопасности работы за счет уменьшения потенциальной энергии пружин механизмов уравновешивания, он снабжен двумя кулачками, жестко закрепленными на звеньях, блоком и гибким
Фиг. 2
элементом, взаимодействующим с этим бло« ком, а также дополнительной пружиной, причем концы гибкого элемента жестко закреплены на соответствующих кулачках, а один конец дополнительной пружины шар- нирно соединен с указанным блоком, при этом второй конец дополнительной пружины закреплен на основании.
J.
Фие.З
