Изобретение относится к машиностроению, в частности к автооператорам, и может использоваться для выполнения транспортных операций при обработке, деталей на металлорежущих станках.
Цель изобретения - расширение функциональных возможностей.
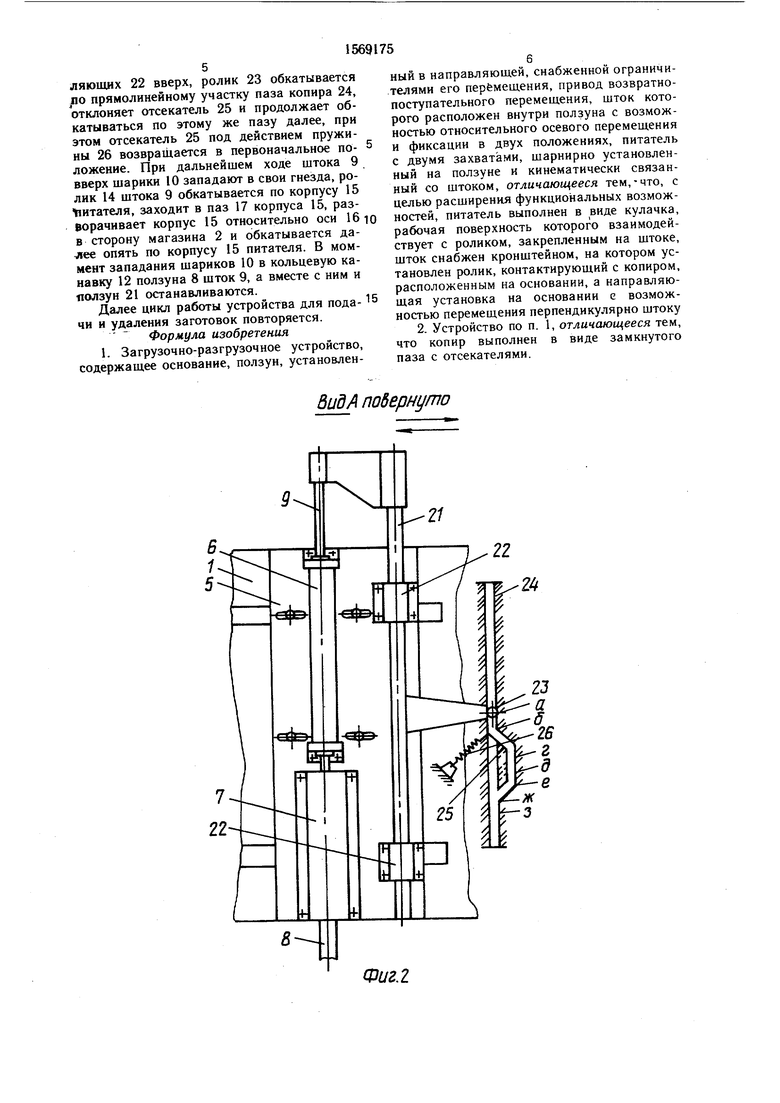
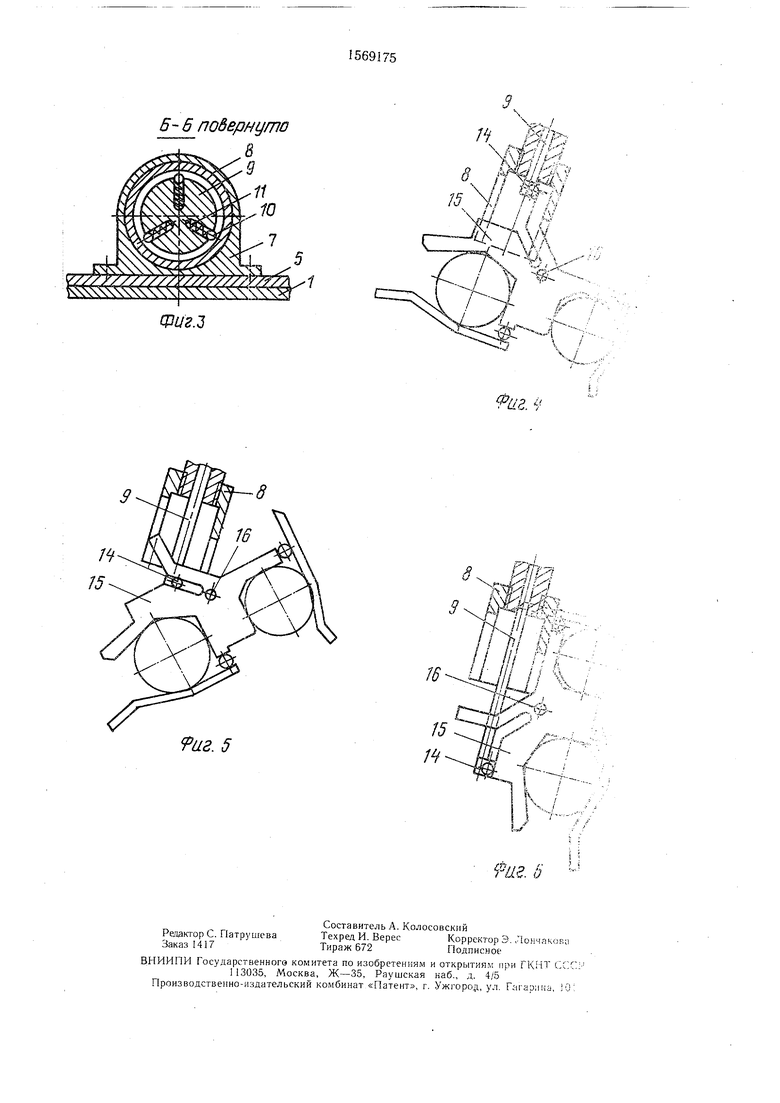
На фиг. 1 изображено предлагаемое устройство в положении, когда его питающе- разгружающий орган опущен в рабочую зону станка; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - питатель до поворота; на фиг. 5 - то же, в момент поворота; на фиг. 6 - то же, после поворота.
Устройство содержит основание 1, закрепленное на передней бабке станка, магазин 2 с отсекателем 3, установленный на горизонтальных крыльях основания 1 (не показаны), разгрузочный лоток 4, подвижную опору 5, установленную на основании 1, пневмо- цилиндр 6 и направляющую 7, установленные на подвижной опоре 5. Ползун 8 расположен внутри направляющей 7.
Шток 9 пневмоцилиндра имеет гнезда, в которых размещены шарики 10.
Пружины 11 удерживают шарики 10 в кон- такте с ползуном 8, установленным в направляющей 7. В ползуне 8 выполнены кольцевые канавки 12 и 13, в которые могут входить шарики 10 и фиксировать ползун 8 относительно штока 9 пневмоцилиндра 6. Шток 9 посредством ролика 14 контактирует с корпусом 15 питателя, смонтированным на оси 16 ползуна 8, причем ролик 14 удерживает корпус 15 питателя от разворота на оси 16. На корпусе 15 питателя выполнен паз 17, расположенный в радиальном направлении от оси 16 ползуна 8. Захват питателя имеет подпружиненные губки - питающую 19 и разгружающую 20. Губки посажены на оси 18 корпуса 15 и образуют с корпусом два гнезда для размещения заготовок.
Механизм осевого перемещения питаю- ще-разгружающего органа относительно обрабатываемой заготовки содержит ползун 21, жестко связанный со штоком 9 пневмоцилиндра 6, установленный в направляющих 22, закрепленных на подвижной опоре 5, снабженный роликом 23, контактирующим с копиром 24, установленным на неподвижном основании 1. Копир 24 выполнен в виде соединенных между собой прямолинейного и криволинейного пазов и снабжен отсекателем 25, который под действием пружины 26 перекрывает прямолинейный участок паза копира 24.
Устройство работает следующим образом.
В крайнем верхнем положении корпус 15 питателя развернут в сторону магазина 2 и нажимает на отсекатель 3, при этом губка 19 отжимается магазином и заготовка закатывается в питатель.
При ходе штока 9 пневмоцилиндра 6 вниз шток 9 посредством подпружиненных шари
0
ь
ков 10, контактирующих с кольцевой канав- кой 12 ползуна 8, перемещает ползун в направляющей 7, причем губка 19 зажимает заготовку. Заготовка переносится в рабочую зону станка. При этом разгружающая губ- .ка 20 находит на находящуюся в центрах (не показаны) обработанную заготовку и зажимает ее в момент полного хода (до упора) ползуна 8 в направляющей 7. Одновременно ползун 21, связанный со штоком 9, перемещается в направляющих 22, при этом ролик 23 перемещается по прямолинейному участку паза копира 24 и при достижении им точки а подается команда на разжатие патрона обработанной заготовки (ходом пиноли задней бабки станка, датчики и воздухораспределитель силового цилиндра не показаны). При дальнейшем ходе штока 9 вниз шарики 10 западают в свои гнезда, а ролик 14 обкатывается по корпусу 15 питателя.
При достижении роликом 23 точки б копира 24 патрон с заготовкой разжат, ролик, обкатываясь по отсекателю 25, заходит в криволинейный участок паза копира 24, при этом он перемещает ползун 21, а вместе с ним и устройство, закрепленное на подвижной опоре 5, вправо, т. е. вдоль оси обработанной заготовки, таким образом, обработанная заготовка выводится из поводкового патрона. При достижении роликом 23 точки в копира 24 перемещение подвижной опоры 5 прекращается. При достижении роликом 23 точки г копира 24 ролик 14 штока 9 заходит в паз 17 корпуса 15 питателя и начинает разворачивать корпус 15 относительно оси 16 ползуна 8. При достижении роликом 23 точки д копира 24 разворот корпуса 15 питателя относительно оси 16 прекращается, ролик 14 штока 9 выходит из паза 17 и обкатывается по корпусу 15 питателя, тем самым удаляется отработанная заготовка и устанавливается на линию центров другая заготовка. В точке е копира 24 ро0 лик 23 перемещает устройство влево вдоль оси обрабатываемой заготовки, тем самым заводится обрабатываемая заготовка в поводковый патрон. В точке ж перемещение устройства прекращается, ролик 23 опять обкатывается по прямолинейному участку паза копира 24, подается команда на зажим заготовки (ходом пиноли задней бабки). При достижении роликом 23 точки з копира 24 шарики 10 штока 9 пневмоцилиндра 6 западают в кольцевую канавку 13 ползуна 8, по0 дача воздуха в пневмоцилиндр 6 прекращается, щто-: 9 останавливается, в это время заготовка уже зажата в поводковом патроне и готова к обработке.
При обратном ходе штока 9 вверх последний перемещает ползун 8 в направляющей 7 до упора, при этом хвостовик разгружающей губки 20 находит на упор, губка 20 открывается на лоток 4 и обработанная заготовка скатывается по нему. Одновременно ползун 21 перемещается в направ0
5
5
5
5
ляющих 22 вверх, ролик 23 обкатывается дю прямолинейному участку паза копира 24, отклоняет отсекатель 25 и продолжает обкатываться по этому же пазу далее, при этом отсекатель 25 под действием пружины 26 возвращается в первоначальное по- ложение. При дальнейшем ходе штока 9 вверх шарики 10 западают в свои гнезда, ролик 14 штока 9 обкатывается по корпусу 15 Питателя, заходит в паз 17 корпуса 15, разворачивает корпус 15 относительно оси 16 в сторону магазина 2 и обкатывается далее опять по корпусу 15 питателя. В мом- мент западания шариков 10 в кольцевую канавку 12 ползуна 8 шток 9, а вместе с ним и ползун 21 останавливаются.
Далее цикл работы устройства для подачи и удаления заготовок повторяется. Формула изобретения
. Загрузочно-разгрузочное устройство, содержащее основание, ползун, установленный в направляющей, снабженной ограничителями его перемещения, привод возвратно- поступательного перемещения, шток которого расположен внутри ползуна с возможностью относительного осевого перемещения и фиксации в двух положениях, питатель с двумя захватами, шарнирно установленный на ползуне и кинематически связанный со штоком, отличающееся тем,-что, с целью расширения функциональных возможностей, питатель выполнен в виде кулачка, рабочая поверхность которого взаимодействует с роликом, закрепленным на штоке, шток снабжен кронштейном, на котором установлен ролик, контактирующий с копиром, расположенным на основании, а направляющая установка на основании с возможностью перемещения перпендикулярно штоку 2. Устройство по п. 1, отличающееся тем, что копир выполнен в виде замкнутого паза с отсекателями.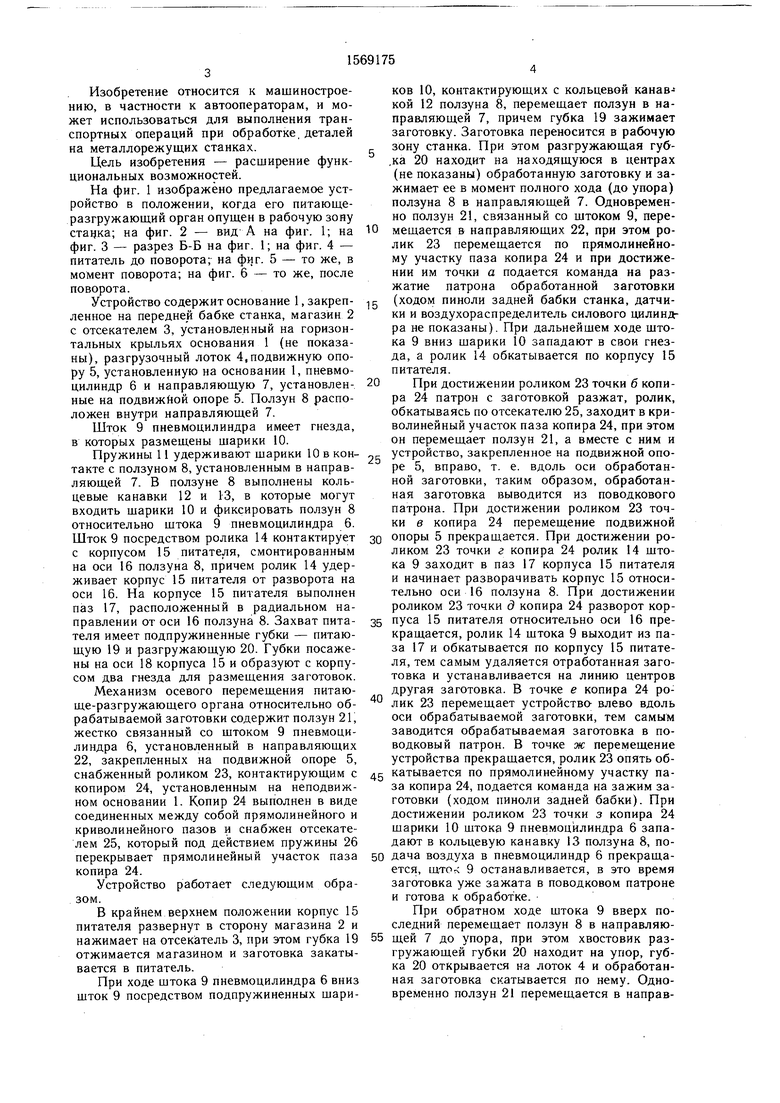
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочно-разгрузочное устройство | 1985 |
|
SU1261767A1 |
| Устройство для автоматической сборки под сварку | 1982 |
|
SU1073058A1 |
| ЗАГРУЗОЧНО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО | 1997 |
|
RU2138368C1 |
| МАНИПУЛЯТОР | 2002 |
|
RU2228259C2 |
| ГАЙКОНАРЕЗНОЙ АВТОМАТ | 2002 |
|
RU2229963C1 |
| Устройство для поштучной выдачидЕТАлЕй | 1979 |
|
SU841913A1 |
| Устройство для подачи и удаления заготовок | 1976 |
|
SU564946A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Автоматическая линия для обработки деталей типа валов | 1983 |
|
SU1175672A1 |
| Станок для сборки в пакет пластин коллекторов электрических машин | 1977 |
|
SU729711A1 |
Изобретение относится к области машиностроения, в частности к автооператорам, и может использоваться для выполнения транспортных операций при обработке деталей на металлорежущих станках. Целью изобретения является расширение функциональных возможностей. Перемещение штока 9 пневмоцилиндра 6 обеспечивает захват губкой 19 заготовки из магазина 2, захват обработанной детали губкой 20, перемещение корпуса 15 питателя по оси заготовки и поворот его на оси 16. Это обеспечивает установку новой детали в патрон для обработки и удаление на лоток 4 обработанной детали. 1 з.п. ф-лы, 6 ил.
Вид А поберну/по
Фиг. 2
В-6 подернуто
Фг/гз
J
Ј
/ / . W /rs&v
фаг у
/й- 7
v
ЛЧ) L,-i
9 $x3f$
:
