GS
N о ю
00
Изобретение относится к подъемно- транспортному оборудованию, а именно к задатчикам скорости механизмов горизонтального перемещения грузов.
Цель изобретения - повышение надеж- ности.
На чертеже приведена функциональная схема устройства.
Задатчик скорости содержит коман- доаппарат 1, подключенный через кон- сервативный, 2, масштабирующий 3 и дифференцирующие 4 и 5 блоки к одному входу сумматора 6 скорости, другой вход которого через масштабирующий блок 7 соединен с выходом блока 2. Выход блока 8 запаздывания соединен с выходом дополнительного сумматора 9, а выход-с третьим входом сумматора &. Выход блока 2 подключен к входам сумматора 9 через последовательно соединенные масштабирующий блок 10 и дифференцирующий блок 11, через последовательно соединенные интегрирующий 12 и масштабирующий 13 блоки и через масштабирующий блок 14.
Задатчик работает следующим образом.
Сигнал на выходе сумматора б при разгоне механизма соответствует зависимости
30 ГTO л Ко КБ 1 к-ГЛс
cos Я t +
+ {()-51пАг +
+ а Ki (1 -cosAr)-br-f
1 + Ко Ks Кз К
где а0 - среднее ускорение точки подвеса груза;40
То - период собственных колебаний груза;
А - частота вынужденных колебаний груза;
До - собственная частота колебаний гру- 45 за;
К - общий коэффициент передачи электропривода механизма;
Ко Ki - величина, обратная ускорению свободного падения;50
Кз - величина, обратная массе тележки с механизмом;
t- время;
0 5 0
5
0
5
0
5
0
а- коэффициент передачи цепи обратной связи по углу отклонения гибкого подвеса;
m - масса груза;
М - масса тележки с механизмом;
r-t-T,
Т - время запаздывания.
В начале разгона крановой тележки от командоаппарата 1 на вход консервативного блока 2 поступает управляющий импульс, амплитуда которого соответствует среднему ускорению тележки при ее разгоне, а длительность равна длительности разгона тележки. Коэффициенты усиления блоков 3, 7, 10, 13 и 14 предварительно рассчитаны. Общий коэффициент передачи может быть рассчитан или определен экспериментально, Это же относится к времени запаздывания.
Реализация устройства обеспечивает формирование такого задающего воздействия, которое позволяет повысить как точность регулирования скорости крановой тележки, так и гашения колебаний груза при использовании программируемых средств управления. Кроме того, повышается надежность и эффективность работы грузоподъемной машины за счет улучшения условий выполнения погрузочно-разгрузоч- ных операций.
Формула изобретения
Задатчик скорости механизма горизонтального перемещения груза на гибком подвесе, содержащий командоаппарат, подключенный через последовательно соединенные консервативный и дифференцирующие блоки к одному входу сумматора скорости, другой вход которого соединен с выходом консервативного блока, отличающийся тем, что, с целью повышения надежности, он снабжен дополнительно сумматором, блоком запаздывания, вход которого соединен с выходом дополнительного сумматора, а выход - с третьим входом первого сумматора, и дифференцирующим и интегрирующим блоками, причем выход консервативного блока подключен к входам дополнительного сумматора соответственно через дополнительный дифференцирующий блок, интегрирующий блок и непосредственно.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом передвижения тележки с гибким подвесом груза | 1989 |
|
SU1684239A1 |
| Устройство для управления электроприводом крановой тележки с грузом на гибком подвесе | 1987 |
|
SU1572986A1 |
| Устройство для управления электродвигателем механизма перемещения груза на гибком подвесе | 1990 |
|
SU1799843A1 |
| Устройство для управления электроприводом горизонтального перемещения подвешенного на гибком подвесе груза | 1989 |
|
SU1645237A2 |
| Устройство для управления приводом передвижения крановой тележки с гибкой подвеской груза | 1991 |
|
SU1799844A1 |
| Устройство для управления электроприводом горизонтального перемещения груза на гибком подвесе | 1987 |
|
SU1528719A1 |
| Устройство для управления приводом перемещения тележки с гибким подвесом грузозахватного органа | 1988 |
|
SU1558851A1 |
| Устройство для управления электроприводом горизонтального перемещения подвешенного на канате груза | 1986 |
|
SU1379238A1 |
| Устройство для управления электроприводом механизма горизонтального перемещения подвешенного на канате груза | 1988 |
|
SU1527134A1 |
| Устройство для управления электропроводом механизма горизонтального перемещения груза | 1985 |
|
SU1342866A1 |
Изобретение относится к подъемно- транспортному оборудованию, а именно к за/ атчикзм скорости механизмов переме- грузов, Цель изобретения - повышеLKLiJh ние надежности. Командоэппарат 1 соединен с входом консервативного блока 2. Выход блока 2 соединен с входами сумматора 6 скорости через масштабирующий 3 и дифференцирующие 4 и 5 блоки и масштабирующий блок 7. Выход блока 2 соединен с входами сумматора 9 через масштабирующий 10 и дифференцирующий 11 блоки, интегрирующий 12 и масштабирующий 13 блоки и масштабирующий блок 14. Выход сумматора 9 через блок 8 запаздывания соединен с входом сумматора 6. При разгоне механизма командоаппарат генерирует сигнал прямоугольной формы, в результате обработки которого на выходе сумматора 6 появляется сигнал, обеспечивающий разгон механизма с гашением колебаний груза. 1 ил. ел С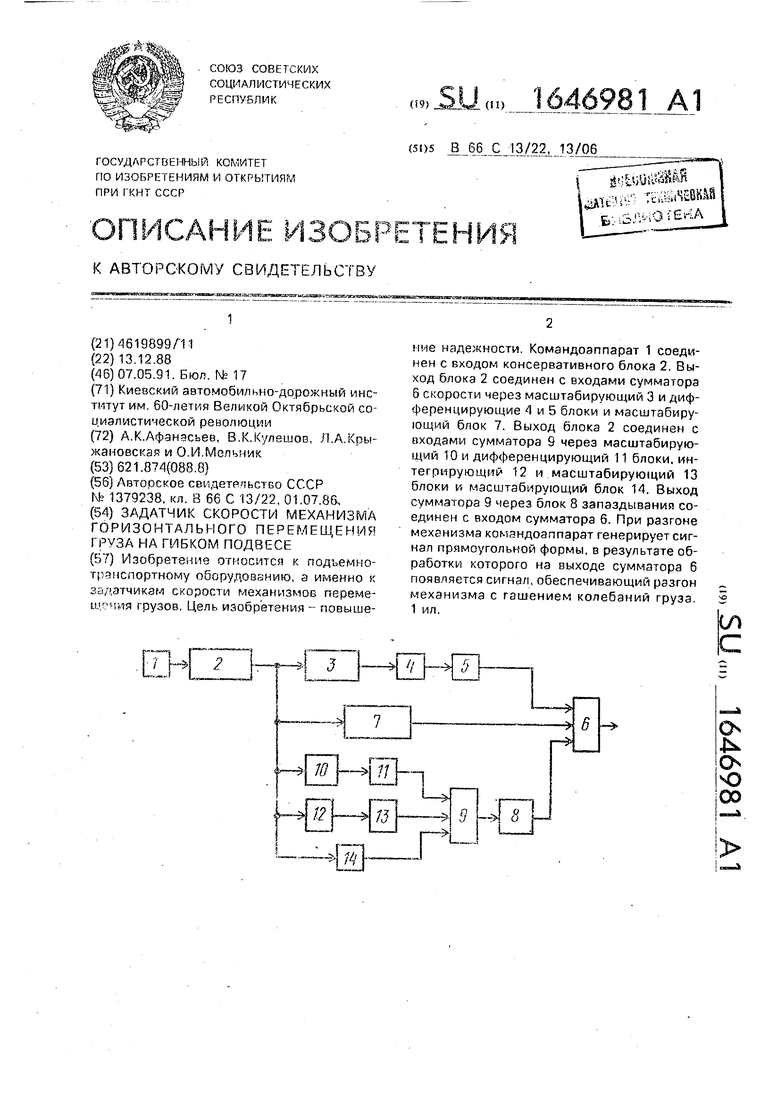
| Устройство для управления электроприводом горизонтального перемещения подвешенного на канате груза | 1986 |
|
SU1379238A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
