I
(21)445 969/25-28
(22)16.05.88
(46) 23.06.90. Бюл. № 23 (75) К.Б.Казанавичюс
(53)621 .839 О88.8)
(56) ilkes D.F. Rolamite. Part. 3. Applications. - Mechanical Engineering, April 22, 1968, c. 38, t4ir. 17,
(54)РОЛИКО-ЛЕНТОЧНЫЙ МЕХАНИЗМ
(57)Изобретение относится к машиностроению, а именно к механизмам перемещение. Рель изобретения - расширение эксплуатационных возможностей за счет осутествления позиционирования в любой точке длины хода корпуса. В . механизме оси 4 и 5 роликов 6 и 7 соединены тягой 1I, а электромагнит 9, размешенный в ролике 6, имеет возможность соединяться с осью 4 через диск JO. Подача электрического тока на обмотки электромагнита 9 позволяет остановить врашение роликов 6 и 7 в любой момент. 2 ил.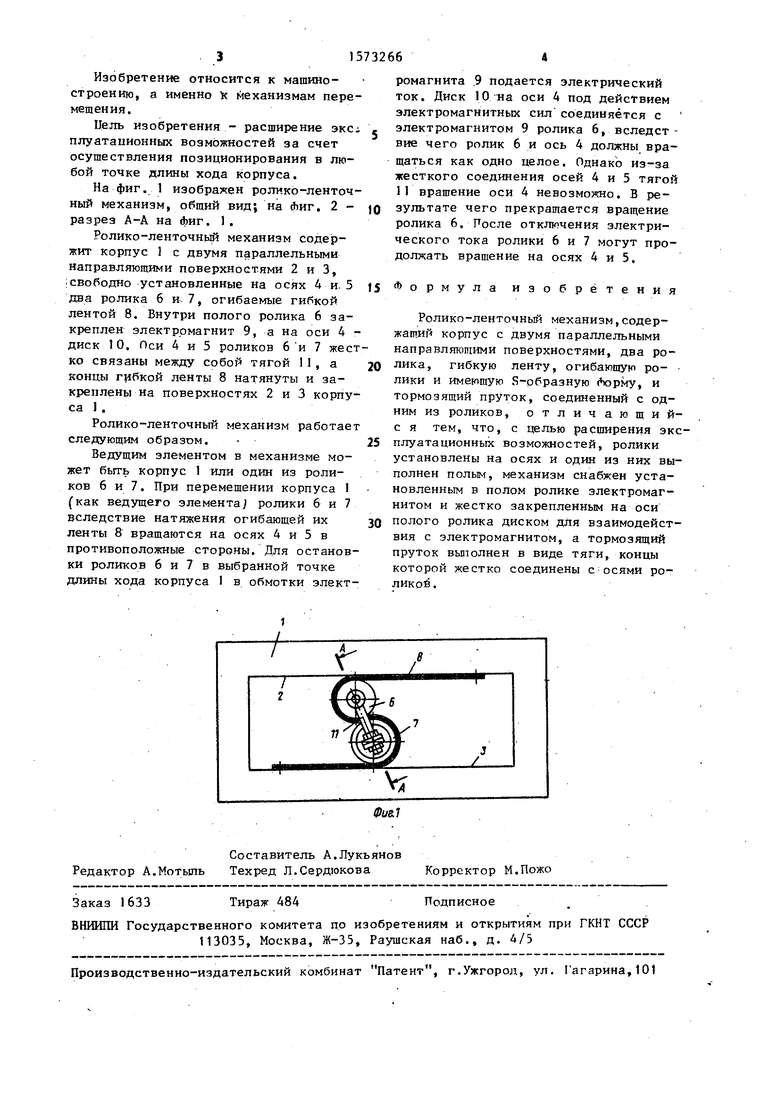
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ СТУПЕНЧАТОЙ ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2259505C1 |
| Линия для производства формового хлеба | 1980 |
|
SU938878A1 |
| АВТОМАТИЧЕСКИЙ КРУГЛЫЙ ТКАЦКИЙ СТАНОК | 1938 |
|
SU65254A1 |
| УСТРОЙСТВО для УПАКОВКИ СТЕРЖНЕОБРАЗНЫХ | 1973 |
|
SU397429A1 |
| Приводной вакуум-барабан ленточногоКОНВЕйЕРА | 1979 |
|
SU823238A1 |
| Работометр транспортного средства | 1986 |
|
SU1394073A1 |
| Устройство для управления прижимом магнитной ленты к ведущему валу | 1983 |
|
SU1152030A1 |
| Лентообмотчик центрального типа | 1979 |
|
SU877624A1 |
| Прибор для зарисовки профиля зубьев зубчатых колес | 1940 |
|
SU59056A1 |
| Автоматическая линия для изготовления радиодеталей | 1983 |
|
SU1128298A1 |
Изобретение относится к машиностроению, а именно к механизмам перемещения. Цель изобретения - расширение эксплуатационных возможностей за счет осуществления позиционирования в любой точке длины хода корпуса. В механизме оси 4 и 5 роликов 6 и 7 соединены тягой 11, а электромагнит 9, размещенный в ролике 6, имеет возможность соединяться с осью 4 через диск 10. Подача электрического тока на обмотки электромагнита 9 позволяет остановить вращение роликов 6 и 7 в любой момент. 2 ил.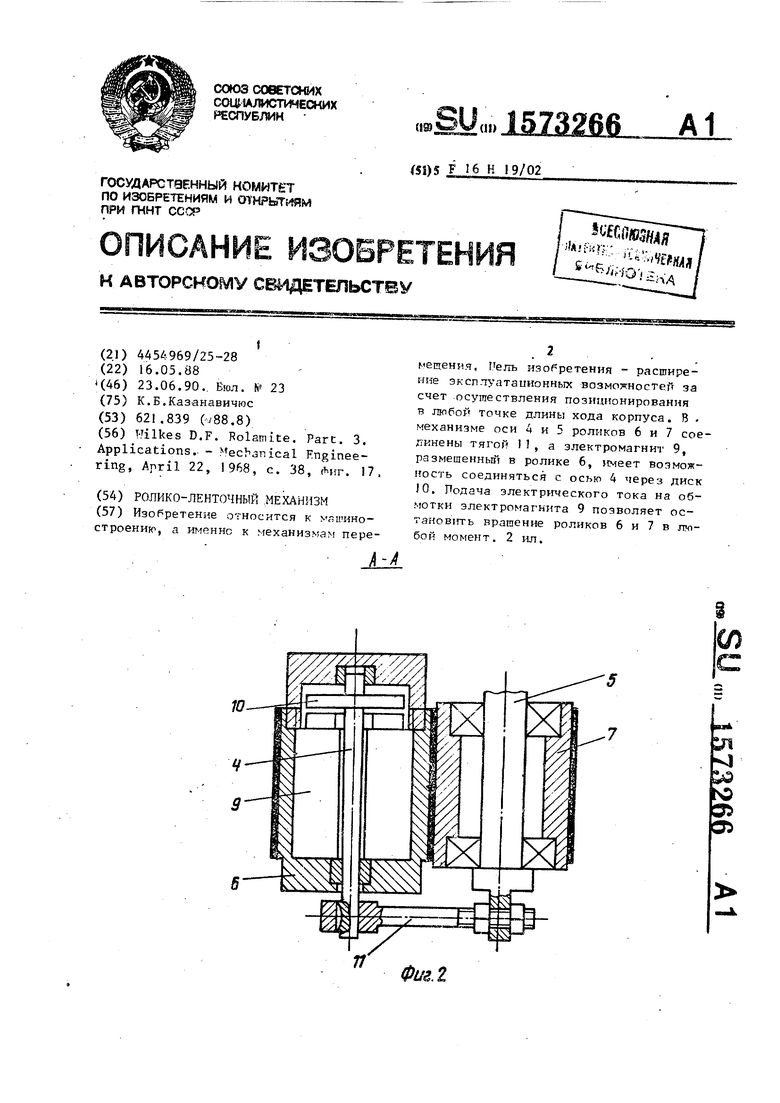
б
JLA.
Фиг. 2
Изобретение относится к машиностроению, а именно К механизмам перемещения.
Цель изобретения - расширение экс. плуатаиионных возможностей за счет осуществления позиционирования в любой точке длины хода корпуса.
На фиг. 1 изображен ролико-ленточ- ный механизм, общий вид на Лиг. 2 - разрез А-А на Лиг, 1.
Ролико-ленточный механизм содержит корпус 1 с двумя параллельными направляющими поверхностями 2 и 3, свободно установленные на осях 4 и 5 два ролика б и 7, огибаемые гибкой лентой 8. Внутри полого ролика 6 закреплен электромагнит 9, а на оси 4 - диск 10. Пси 4 и 5 роликов 6 и 7 жестко связаны между собой тягой 11, а концы гибкой ленты 8 натянуты и закреплены на поверхностях 2 и 3 корпуса 1 .
Ролико-ленточный механизм работает следующим образом.
Ведущим элементом в механизме может быть корпус 1 или один из роликов 6 и 7. При перемещении корпуса 1 (как ведущего элемента; ролики 6 и 7 вследствие натяжения огибающей их ленты 8 вращаются на осях 4 и 5 в противоположные стороны. Для остановки роликов 6 и 7 в выбранной точке длины хода корпуса 1 в обмотки элект
to
2032664
ромагнита 9 подается электрический ток. Диск 10 на оси 4 под действием электромагнитных сил соединяется с электромагнитом 9 ролика 6, вследст - вне чего ролик 6 и ось 4 должны вращаться как одно целое. Однако из-за жесткого соединения осей 4 и 5 тягой 11 вращение оси 4 невозможно. В результате чего прекращается вращение ролика 6. После отключения электрического тока ролики 6 и 7 могут продолжать вращение на осях 4 и 5.
20
J5 о р м у л а изобретени
Ролико-ленточный механизм,содержащий корпус с двумя параллельными направляющими поверхностями, два ролика, гибкую ленту, огибающую ролики и имеющую S-образную юрму, и тормозящий пруток, соединенный с одним из роликов, отличающи й- с я тем, что, с целью расширения эксплуатационных возможностей, ролики установлены на осях и один из них выполнен полым, механизм снабжен установленным в полом ролике электромагнитом и жестко закрепленным на оси полого ролика диском для взаимодействия с электромагнитом, а тормозящий пруток выполнен в виде тяги, концы которой жестко соединены с осями роликов1.
5
0
