Изобретение относится к машиностроению, в частности к оборудованию для прессования кип из волокнистых материалов.
Цель изобретения - повышение надежности работы и снижение металлоемкости за счет упрощения конструкции.
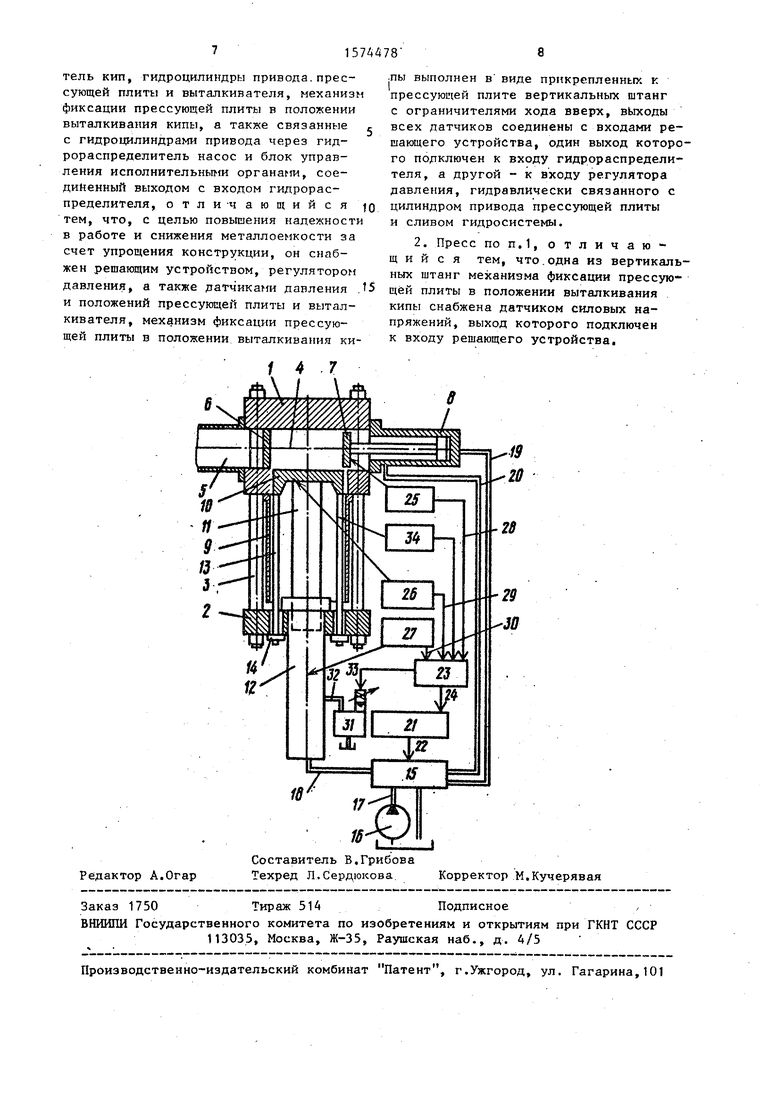
На чертеже представлена конструктивная схема пресса и блок-схема системы управления.
Пресс содержит верхнюю 1 и нижнюю 2 траверсы, соединенные колоннами 3. В верхней части пресса имеется
прессовая камера 4, образованная верхней траверсой 1 и боковыми стенками (не показаны). Верхняя траверса 1 при прессовании является опорной. На левом торце камеры закреплена приемная кассета 5, Окно между камерой 4 и приемной кассетой 5 перекрыто заслонкой 6, которая имеет возможность горизонтального перемещения в направлении, перпендикулярном направлению выталкивания. Отверстие в противоположном торце камеры перекрыто выталкивающей плитой 7, цилиндр 8 привода которой
сл -J
4Ь
4ъ М
00
10
М
прикреплен к верхней траверсе 1. К нижней части прессовой камеры 4 прикреплена камера 9 предварительного уплотнения, Соосно с траверсами расположена подвижная прессующая плита 10, связанная с плунжером 11 цилиндра 12, установленного в нижней траверсе 2. Перемещение плиты 10 может осу- ществляться в вертикальном направлении вдоль общей вертикальной оси прессовой камеры 4 и камеры 9 предварительного уплотнения, К прессующей плите 10 снизу прикреплены штанги 13, проходящие сквозь отверстия в нижней траверсе 2.
На нижних концах штанг 13 расположены ограничители 14 хода прессующей плиты таким образом, что при постановке их в упор в нижнюю траверсу 2 верхняя плоскость прессующей плиты 10 образовывает одну плоскость с ниж-г ней рабочей плоскостью кассеты 5 и нижней кромкой выталкивающей плиты 7. Штанги 13 с ограничителями 14 хода 25 являются механизмом фиксации прессующей плиты в положении выталкивания кипы.
Система управления прессом состоит из гидрораспределителя 15, связанного гидравлически с насосом 16. и гидроцилиндрами 8 и 12 магистралями 17-20, Управляющий вход гидрораспределителя 15 соединен электрически с выходом блока 21 управления исполнительными
20
30
21 управления плунжер 11 с прессующей плитой 10 совершает рабочий ход, перемещая материал из камеры 9 в камеру 4 и сжимая его. При этом масло от насоса 16 через гидрораспределитель 15 поступает в цилиндр 12, Рабочий ход осуществляется из крайнего нижнего положения до совпадения рабочей кости прессующей плиты 10 с нижней рабочей плоскостью приемной кассеты 5. Одновременно ограничители 14 хода прессующей плиты упираются в нижнюю плоскость траверсы 2, а датчик 26 выдает в решающее устройство 23 соответствующий сигнал. По этому сигналу выдается команда через блок 21 и гид- рораспдеделитель 15 на охолащивание насоса 16, и следовательно, остановку плиты 10, Прессование окончено. Кипа сформирована в прессовой камере . 4 (это положение изображено на чертеже) . При этом в процессе рабочего хода плиты 10 давление в цилиндре 12 увеличивается пропорционально ходу и достигает своего максимума в момент окончания прессования. В связи с тем, что масса поданного в камеру 9 и запрессованного в камере 4 волокнистого материала каждой последующей кипы может отличаться от массы предыдущей в определенных пределах, ограниченных допуском, а размеры сформированной в прессовой камере кипы во всех направлениях одинаковы, кипы оторганами проводом 22, а вход блока 21 35 личаются и по плотности, Следователь0
5
0
30
21 управления плунжер 11 с прессующей плитой 10 совершает рабочий ход, перемещая материал из камеры 9 в камеру 4 и сжимая его. При этом масло от насоса 16 через гидрораспределитель 15 поступает в цилиндр 12, Рабочий ход осуществляется из крайнего нижнего положения до совпадения рабочей кости прессующей плиты 10 с нижней рабочей плоскостью приемной кассеты 5. Одновременно ограничители 14 хода прессующей плиты упираются в нижнюю плоскость траверсы 2, а датчик 26 выдает в решающее устройство 23 соответствующий сигнал. По этому сигналу выдается команда через блок 21 и гид- рораспдеделитель 15 на охолащивание насоса 16, и следовательно, остановку плиты 10, Прессование окончено. Кипа сформирована в прессовой камере . 4 (это положение изображено на чертеже) . При этом в процессе рабочего хода плиты 10 давление в цилиндре 12 увеличивается пропорционально ходу и достигает своего максимума в момент окончания прессования. В связи с тем, что масса поданного в камеру 9 и запрессованного в камере 4 волокнистого материала каждой последующей кипы может отличаться от массы предыдущей в определенных пределах, ограниченных допуском, а размеры сформированной в прессовой камере кипы во всех направлениях одинаковы, кипы от
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ПРЕССОВАНИЯ ПЛИТ волокнистых | 1973 |
|
SU361897A1 |
| Система управления гидравлическим прессом | 1985 |
|
SU1238976A1 |
| УСТРОЙСТВО ДЛЯ ПРОИЗВОДСТВА КИП ИЗ ЛЕКАРСТВЕННЫХ РАСТЕНИЙ | 1997 |
|
RU2114737C1 |
| ГИДРАВЛИЧЕСКИЙ ПРЕСС ДЛЯ ПРЕССОВАНИЯ В КИПЫ | 1966 |
|
SU179193A1 |
| ГИДРАВЛИЧЕСКИЙ ПРЕСС ДЛЯ ПРОИЗВОДСТВА КИП ИЗ СЕЛЬСКОХОЗЯЙСТВЕННОГО СЫРЬЯ | 1995 |
|
RU2108024C1 |
| ГИДРАВЛИЧЕСКИЙ ПРЕСС ДЛЯ ПАКЕТИРОВАНИЯ ХЛОПКА | 1949 |
|
SU84919A1 |
| ПРЕСС ДЛЯ ПРОИЗВОДСТВА КИП ИЗ КОРНЕВОЙ МАССЫ ЛЕКАРСТВЕННЫХ РАСТЕНИЙ | 2000 |
|
RU2178636C1 |
| Гидравлический пресс для прессования в кипы волокнистого материала | 1984 |
|
SU1193011A1 |
| ФОРМОВОЧНЫЙ АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ РАЗОВЫХ ПЕСЧАНЫХ ФОРМ | 1990 |
|
RU2014942C1 |
| ПРЕСС ДЛЯ ПРОИЗВОДСТВА КИП ИЗ КОРНЕЙ СОЛОДКИ | 2000 |
|
RU2192735C2 |
Изобретение относится к машиностроению, в частности к оборудованию для прессования кип из волокнистых материалов. Цель изобретения - повышение надежности в работе и снижение металлоемкости за счет упрощения конструкции. Механизм фиксации положения прессующей плиты в положении выталкивания кипы выполнен в виде прикрепленных к последней вертикальных штанг с ограничителями их хода вверх. На одной из этих штанг установлен датчик силового напряжения, подключенный к одному из входов решающего устройства. Система управления гидравлическим прессом снабжена решающим устройством, входы которого подключены к выходам датчиков давления и положений прессующей плиты и выталкивателя. Один выход решающего устройства соединен с входом блока управления исполнительными механизмами, а другой - с входом регулятора давления. Таким образом, давление в камере прессования автоматически устанавливается для каждой прессуемой кипы в зависимости от команд датчиков, плотности кипы и положения механизмов. 1 з.п. ф-лы, 1 ил.
с решающим устройством 23 - проводом 24. Информационные входы решающего устройства 23 соединены электрически с датчиками 25 и 26 положений выталкивателя и прессующей плиты и датчиком 27 давления в цилиндре привода прессующей плиты проводами 28-30. Крме того, система содержит регулятор 31 управления давлением, связанный
с цилиндром 12 и решающим устройство
23 гидравлической магистралью 32 и токопроводом 33. Регулятор 31 выполнен в виде гидроклапана с пропорциональным электромагнитным управлением.
После остановки плиты 10 решающее устройство 23 через блок 21 выдает сигнал в гидрораспределитель 15 на перемещение плиты 7, т.е. на выталкиваПеред началом прессования плита 10 50 ние кипы из камеры 4. Перед этим должнаходится в крайнем нижнем положении.
Пресс работает следующим образом.
Вначале осуществляется накопл необходимого для образования кипы количества волокнистого материала в ка- мере 9 предварительного уплотнения (устройство для.подачи волокна в камеру 9 не показано) . Затем по команде блока
но, отличаются и давления, которые необходимо создать в цилиндре 12 для образования каждой из кип, т.е. давления в момент окончания прессования. Указанное давление, регистрируемое датчиком 27, по команде на окончание прессования запоминается в блоке 23 и является первой исходной величиной для фиксации плиты 10 в положении выПосле остановки плиты 10 решающее устройство 23 через блок 21 выдает сигнал в гидрораспределитель 15 на перемещение плиты 7, т.е. на выталкивана открыться заслонка 6,
В течение всего времени выталкивания усилие со стороны кипы на прессующую плиту 10 уменьшается пропорционально тому, какая часть кипы еще остается в прессовой камере 4, т.е. пропорционально положению выталкивающей плиты 7, Сигналы об этом положении пе515744786
редаются датчиком 25 в решающее уст- давление равно разнице величин а) и
ройство 23 и является второй исходной величиной для фиксации плиты 10 в положении, необходимом для выталкивания кипы.
При этом в течение всего времени выталкивания кипы прессующая плита 10 находится в заданном равновесном положении, если усилие, развиваемое плунжером 11, несколько превышает усилие от действия упругих сил в кипе, причем указанная разница усилий передается на штанги 13. Ее величина не
должна превышать допускаемую прочность 5 уменьшение или увеличение интенсив-
штанг. Это гарантирует прижатие ограничителей 14 к нижней плоскости траверсы 2 и нахождение плиты 10 в заданном положении.
Для поддержания заданной разницы усилий решающее устройство 23 определяет параметры уменьшения (сброса) давления в соответствии со следующими полученными и заданными исходными величинами:
а)давление в цилиндре 12, зарегистрированное датчиком давления 27 в момент окончания прессования;
б)положение плиты 7 в течение процесса выталкивания, регистрируемое датчиком положения 25;
в)задано: к моменту окончания выталкивания усилие воздействия кипы ка плиту 10 равно нулю;
г)задано: величина превышения дав ления в цилиндре 11 по отношению к расчетному для гарантированного .прижатия ограничителей 14 к траверсе 2;
д)задано: длина кипы (размер кипы в направлении выталкивания).
Решающее устройство в процессе вычислений делит величину а),на величину д), полученный градиент и скорость изменения величины б)} определяет параметры (скорость) уменьшения давления в цилиндре 12, а также расчетное давление в любой точке хода выталкивающей плиты 7.
Сигнал о скорости изменения давления поступает в регулятор 31 управления давления, в котором открвгва- ется сливное отверстие на величину, пропорциональную величине сигнала. Че
Формула изобретения 1. Гидравлический пресс для пресрез отверстие сжатая жидкость из цилиндра 12 уходит на слив, и давление « сования кип из волокнистых материалов, в цилиндре уменьшается.содержащий прессовую камеру с подвияОднако сброс давления из цилиндра начинается не сразу с началом движения плиты 7, а в момент когда расчетное
ной прессующей плитой, размещенные на противоположных торцах прессовой камеры приемную кассету и внталкнваг). Когда эта величина давления зарегистрируется датчиком 27, начинается, сброс давления.
По ходу плиты 7 датчик 2 7 давления осуществляет контроль соответствия давления в цилиндре 1/ величине давления, получаемой в устройстве 23 при решении описанной задачи с добавлением величины г). При рассогласовании реального и рассчитываемого процессов решающее устройство выдает команду в регулятор 31 управления давлением на
ности процесса сброса давления.
Это обеспечивает нахождение плиты
10в поджатом положении за счет раз-ч ности усилия, развиваемого плунжером
11под действием остаточного давления в цилиндре 12, и распорного (реактивного) усилия части кипы, еще остающейся в каждый момент времени в камере 4. Разница в усилиях передается на штанги 13 и может быть выбрана достаточно небольшой, однако обеспечивающей гарантированное поджатые прессующей плиты 10 к кипе, т.е.
к положению для выталкивания кипи.
I Штанги 13, рассчитанные исходя1из |зтой разницы, имеют небольшую металлоемкость, а конструкция механизма для фиксации получается достаточно простой.
Кроме того, для повышения надежности гидравлического пресса в системе управления могут быть использованы датчики 34 силовых напряжений в штангах 13.
Если в процессе выталкивания кипи величина сигнала от датчика 34 превышает заранее заданную допускаемую величину,решающее устройство выдает сигнал на увеличение интенсивности сброса давления либо на аварийную остановку процесса для устранения неисправности.
Использование изобретения повышает надежность работы пресса и упрощает его конструкцию.
Формула изобретения 1. Гидравлический пресс для прес
сования кип из волокнистых материалов, содержащий прессовую камеру с подвияной прессующей плитой, размещенные на противоположных торцах прессовой камеры приемную кассету и внталкнватель кип, гидроцилиндры привода.прессующей плиты и выталкивателя, механизм фиксации прессующей плиты в положении выталкивания кипы, а также связанные с гидроцилиндрами привода через гидрораспределитель насос и блок управления исполнительными органами, соединенный выходом с входом гидрораспределителя, отличающийся тем, что, с целью повышения надежности в работе и снижения металлоемкости за счет упрощения конструкции, он снабжен решающим устройством, регулятором давления, а также датчиками давления и положений прессующей плиты и выталкивателя, механизм фиксации прессующей плиты в положении выталкивания ки6
18
пы выполнен в виде прикрепленных г. прессующей плите вертикальных штанг с ограничителями хода вверх, выходы всех датчиков соединены с входами решающего устройства, один выход которого подключен к входу гидрораспределителя, а другой - к входу регулятора давления, гидравлически связанного с цилиндром привода прессующей плиты и сливом гидросистемы.
в
| Патент США № 2955529, кл | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
