Изобретение относится к различ- мым областям автоматического регулирования и может быть использовано в робототехнике.
Цель изобретения сокращение времени переходного процесса и повышение точности позиционирования системы.
На чертеже приведена блок-схема предлагаемой системы управления.
Система содержит задатчик 1 упраляющего воздействия, элемент 2 сравнения по скорости, усилитель Э, злектродвигатель 4, редуктор 5, объ ет 6 регулирования, первый датчик скорости, второй датчик 8 скорости блок 9 выделения модуля сигнала и блок 10 деления.
При проектировании системы приня то,что редуктор абсолютно жесткий, вал двигателя связан с нагрузкой через пружину, жесткость которой соответствует жесткости реального редуктора.
Система работает следующим образом.
Задатчик 1 управляющего воздействия вырабатывает управляющий сигнал F, который поступает на первый вход элемента 2 сравнения. На второй вхо элемента 2 сравнения поступает сигнал Y с выхода блока 10 деления. Эти сигналы сравниваются и элемент
2 сравнения вырабатывает управляющее 35 целью сокращения времени пе- напряжение d для электродвигателя 4. Этот сигнал усиливается усилителем 3 и поступает в якорную цепь электродвигателя 4, приводящего в действие объект 6 регулирования через редук- 40 тор 5. На первый вход блока IО деления поступает сигнал Z от датчика 7 пропорциональный скорости электродвигателя 4. Сигнал Q, пропорцио- нальный скорости объекта 6 регулиро- 45 вания, от датчика 8 поступает на блок 9 вьщеления модуля сигнала. С
реходного процесса и повышения точности позиционирования системы, в нее введены последовательно соединенные второй датчик скорости, блок выделения модуля сигнала и блок деле ния, второй.вход которого соединен с выходом первого датчика скорости, выход блока деления соединен с вторым входом элемента сравнения по скорости, а вход второго датчика скорости соединен с выходом объекта регулирования.
Составитель П.Кудрявцев Редактор А.Козориз Техред м.Ходанич Корректор В.Бутяга
Заказ 7640/48 Тираж 862Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул. Проектная,4
зически
выхода блока 9 модуль сигнала Q приходит на второй вход блока IО деления, Кроме того, на второй вход блока 10 деления поступает опорное напряжение Ug для исключения деления на нуль. Идея заключается в том, чтобы с помощью электродвигателя подавлять колебания нагрузки, Блок 10 деления быстро выравнивает сигналы F и Y , Сигнал Y определяется отношением сиг- налов Z и Q. Если ZVQ, то Y - большое, следовательно, управляющее напряжение электродвигателя, которому соответствует сигнал , , - маленькое, так как t определяется разностью сигналов F и Y . И наоборот, если Z Q, то Y - малое, а ., - большое. Таким образом, двигатель как бы подстраивается под нагрузку. Фиэто означает, что двигатель не дает взводиться пружине, которая находится между валом двигателя и нагрузкой, он ее демпфирует. Формула изобретения
Система управления, содержащая последовательно соединенные задатчик управляющего воздействия, элемент сравнения по скорости, усилитель, электродвигатель и редуктор, подклю- ченньй к входу: объекта регулирования, и датчик скорости, вход которого соединен с выходом электродвигателя, отличающаяся тем.
целью сокращения времени пе-
реходного процесса и повышения точности позиционирования системы, в нее введены последовательно соединенные второй датчик скорости, блок выделения модуля сигнала и блок деления, второй.вход которого соединен с выходом первого датчика скорости, выход блока деления соединен с вторым входом элемента сравнения по скорости, а вход второго датчика скорости соединен с выходом объекта регулирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления объектом регулирования | 1987 |
|
SU1465302A1 |
| Система управления | 1988 |
|
SU1575151A1 |
| Устройство для управления частотно-регулируемым многодвигательным электроприводом | 1984 |
|
SU1252906A1 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1986 |
|
SU1385216A1 |
| Устройство для управления частотно-регулируемым многодвигательным электроприводом | 1984 |
|
SU1256126A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для управления позиционным электроприводом | 1981 |
|
SU993199A1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
| Устройство для управления частотно-регулируемым многодвигательным электроприводом | 1982 |
|
SU1064415A1 |
| ЭЛЕКТРОПРИВОД С АДАПТИВНЫМ РЕГУЛИРОВАНИЕМ ТОКА | 1993 |
|
RU2095930C1 |
Изобретение относится.к различным областям автоматического регулирования, и в частности, может быть использовано в робототехнике. В системах управления с упругими элементами в цепи нагрузки возмож- нь| возникновения колебаний вала нагрузки. Цель изобретения состоит в сокращении времени переходного процесса и повьшении точности позиционирования системы управления за счет подавления колебаний электродвигателем. Достигается это введением в систему блока деления 10, блока вьщеления модуля сигнала 9 и второго датчика скорости 8. Управляющее напряжение электродвигателя 4 с выхода элемента сравнения 2 поступает на вход усилителя 3. Оно определяется разностью сигналов, приходящих на . первый и второй входы элемента сравнения от задатчика управляющего воздействия 1 и с выхода блока деления 10. Величина выходного сигнала блока деления, в свою очередь, опре- деляется отношением сигналов, приходящих на его первый и второй входы соответственно с выхода датчика скорости 5 я выхода блока вьщеления модуля сигнала 9. Если сигнал, поступающий на первый вход блока деления,Q больше сигнала, поступающего на вто-в рой вход блока деления, то его выходной сигнал большой, а управляющее напряжение электродвигателя маленькое, и наоборот. Таким образом электродвигатель, подстраиваясь § под нагрузку, не дает взводиться пружине, которая находится между валом двигателя и нагрузкой, он ее демпфирует. При этом происходит некоторая потеря в скорости, однако время переходного процесса в целом сокращается и увеличивается точность позиционирования. 1 ил. (Л С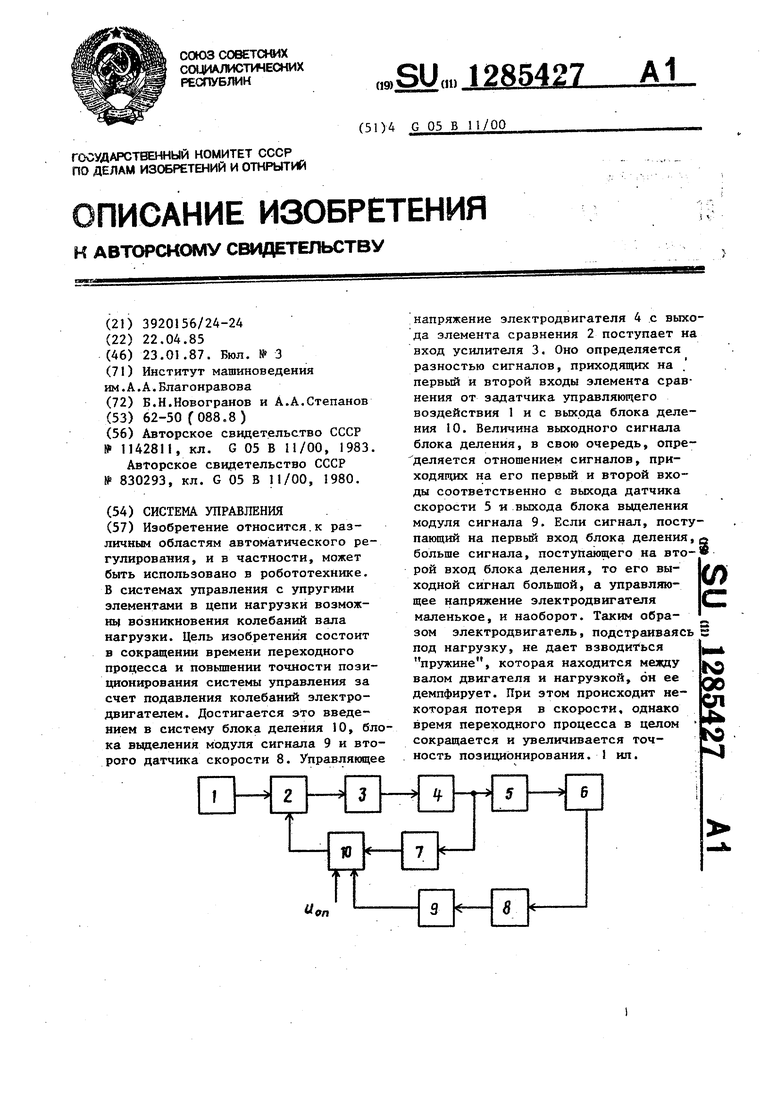
| Следящая система | 1983 |
|
SU1142811A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Система управления электроприводомпРОМышлЕННОгО РОбОТА | 1979 |
|
SU830293A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
