Изобретение относится к электротехнике и может быть использовано при сборке электрических соедининителей.
Цель изобретения - автоматизация процесса сборки и пайки и расшире ние технологических возможностей.
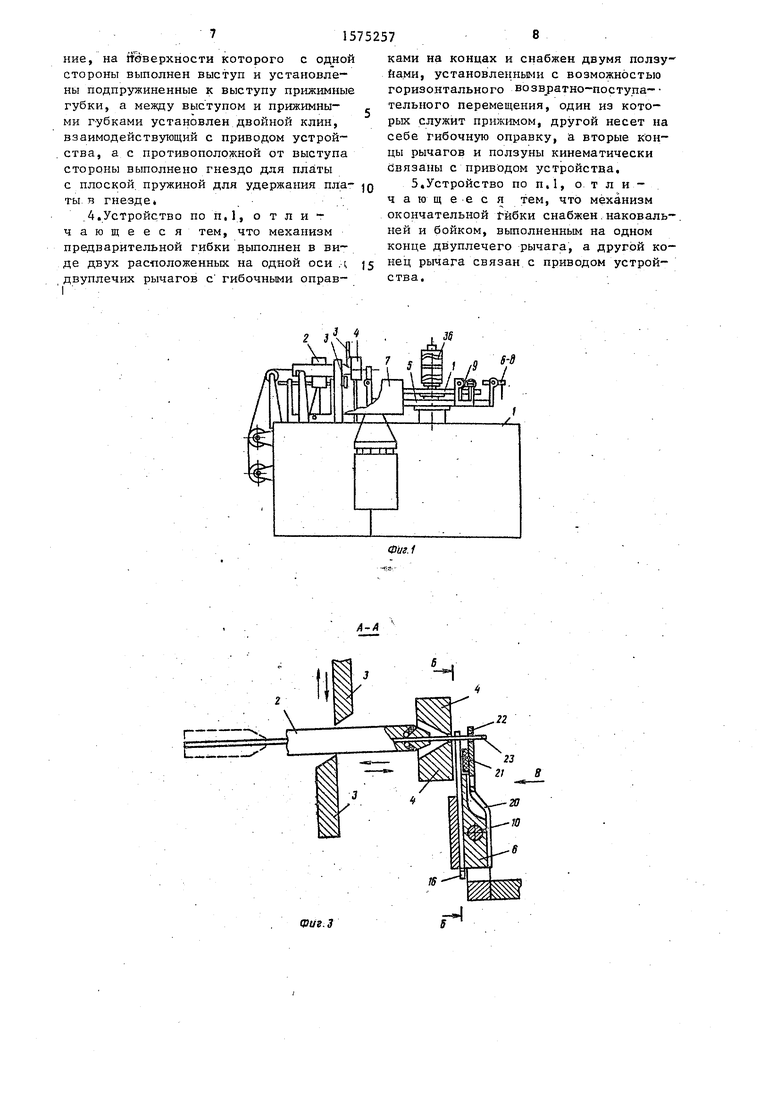
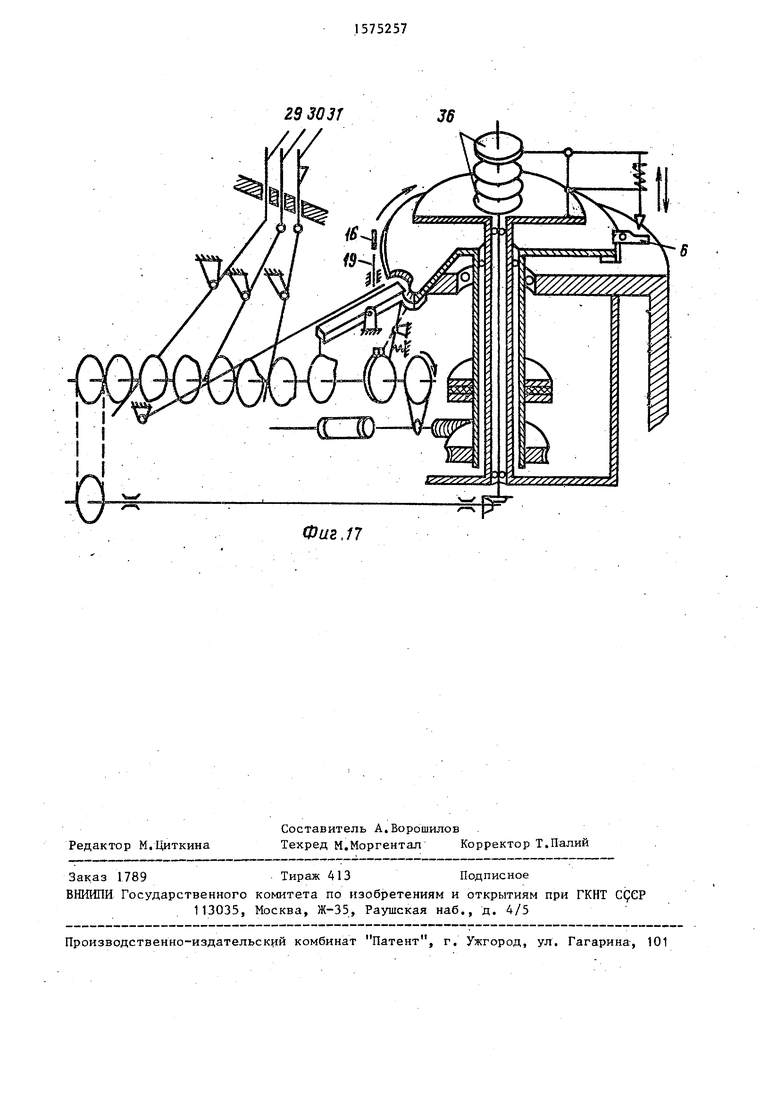
На фиг 1.1 показано устройствоs общий вид; на фиг.2 - то же, вид сверху; на фиг.З - разрез А-А на фиг.2; на фиг.4 - разрез Б-Б на фиг.З; на фиг,5 вид В на фиг.З; на фиг.6 - разрез Г-Г на фиг.2; на фиг.7 - разрез Д-Д на фиг.2; на фиг.8 - узел, собранный с помощью предлагаемого устройства; на фиг.9 - разрез Е-Е на фиг.8; на фиг. 10 - вто рой вариант сборки; на - разрез Ж-Ж на фиг.10; на фиг.12 - уста- новка платы в захват; на фиг,13 разрез 3-3 на фиг,12; на фиг.14 - направляющий механизм; на фиг.15 - разрез И-И на фиг,14; на фиг.16 - разрез К-К на фиг,14; на фиг.17 - привод устройства.
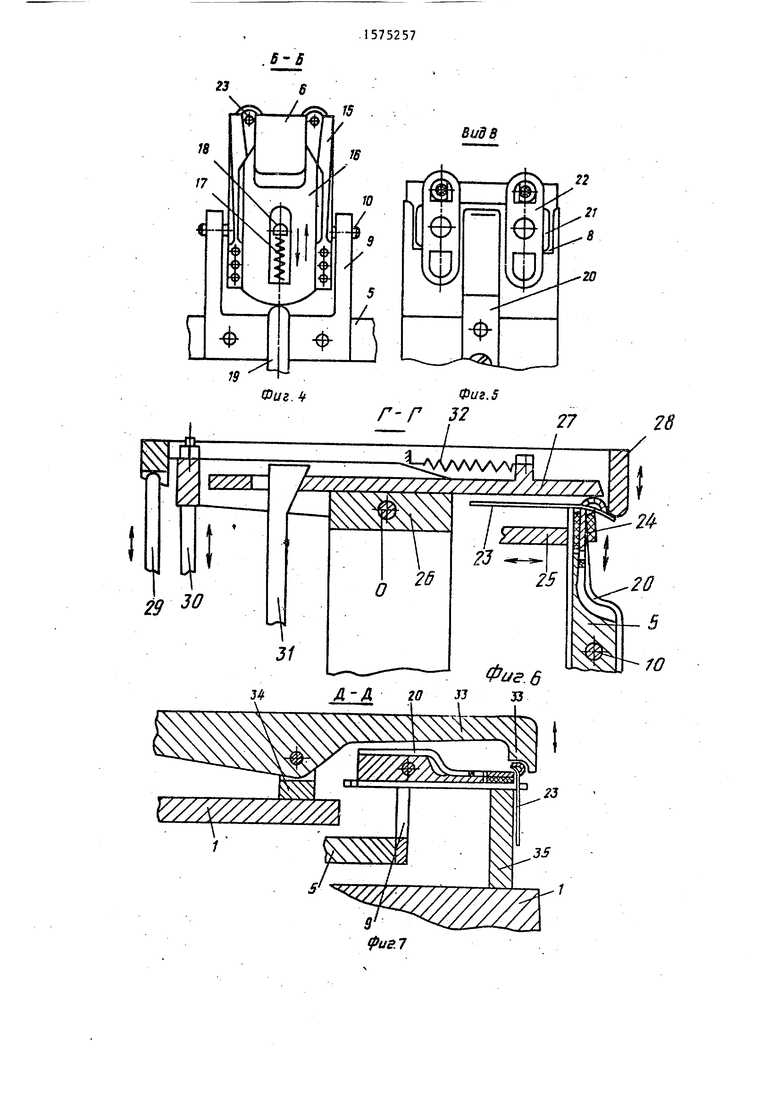
Устройство содержит последовательно расположенные на станине 1 узел 2 подачи проводов, механизм 3 резки их, механизм 4 направления концов проводов, поворотный транспортер 5 с захватами 6, вибробункер 7 подачи плат с лепестками на сборку. Устройство снабжено гнездами 8 для плат, выполненными на захватах 6. Захваты 6 установлены на кронштейнах 9 с осями 10. По периметру транспортера на станине 1 расположены механизмы И и 12 соответственно предварительной и окончательной гибки для соединения концов проводов с лепестками платы и паяльники 13, механизм 14 снятия готовых изделий. Захват 6 состоит из подпружиненных губок 15, взаимодействующих с двойным клином 16 посредством пружины 17, опирающейся на упор 18, и штока 19, кинематически связанного с приводом устройства, Пружина 20 служит для удержания
платы 21 с лепестками 22 в гнезде 8.
Монтажный провод 23 удерживается губками 15. Механизм И предварительной гибки (фиг,6) содержит гибочную оправку 24,выполненную на конце двуплечего рычага, прижим 25, поджимающий захват 6 к оправке 24, кронштейн 26, несущий на себе ползун 27 с гибочным элементом на конце, гибочную оправку 28 на конце второго дву
5 0 5
0 5 0 5
0
плечего рычага. Оба рычага установлены на оси, закрепленной в кронштейне 26, шток 29 и тяга 30 связаны с приводом устройства и управляют работой оправок 24, 28, клин 31 во взаимодействии с пружиной 32 управляет движением ползуна 27 (аналогично управляется прижим 25, на чертеже не показано) ,
Механизм 12 окончательной гибки состоит из бойка 33, выполненного на одном конце двуплечего рычага, второй конец которого связан с приводом устройства, а рычаг установлен на стойке 34, закрепленной на станине 1 и наковальне 35, помещенной на станину 1,
Устройство снабжено также блоком кулачков 36 для управления работой механизмов, расположенных: на станине 1 по периметру транспортера 5, кулачков 37 и 38, служащих для поворота захватов,6 из вертикального положения в горизонтальное и наоборот, и кулачков 39, взаимодействующих с клином 16 и освобождающих монтажные провода 23 при съеме готового узла механизмом 14,
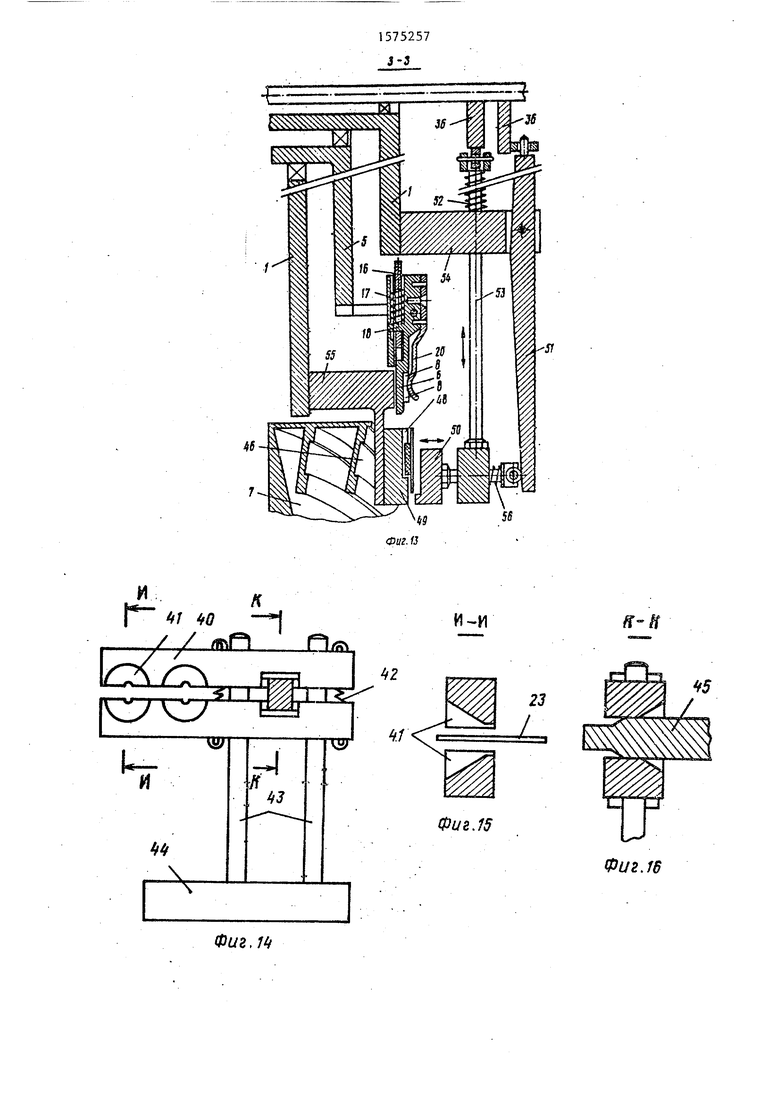
Механизм 4 (фиг.14-16) направления концов проводов содержит направляющие 40 с коническими отверстиями 41, направляющие 40 стянуты пружинами 42 и установлены на колоннах 43, которые закреплены в основании 44, установленном на станине 1, Направляющие 40 периодически смыкаются и размыкаются посредством клиНа 45 и пружин 42. Клин 45 связан с приводом устройства и установлен с возможностью горизонтального перемещения в кронштейне на станине 1.
Вибробункер 7 снабжен подающим механизмом со спиральным лотком 46, по которому платы 21 перемешаются в приемное гнездо 47 до упора 48, выполненного в приемнике 49. Шибер-от- секатель 50, связанный с блоком кулачков 36 через рычаг 51 и подпружиненный пружиной 52 установленной на штоке 53, предназначен для отсекания одной платы 21 от общего потока и для подачи ее через стойку 54 в гнездо 8 захвата 6, опирающегося на кронштейн 55. Пружина 56 предназначена для возврата шибера-отсекателя 50 в исходное положение.
Устройство работает следующим образом.
Монтажный провод 23, помещенный на катушке, специальной иглой протягивается через узел 2 подачи, механизм 3 резки, механизм 4 направления проводов, отверстие в лепестке 22 и закрепляется в захвате 6 губками 15 (две губки - два провода), затем включается привод по циклограмме, узел 2 подачи перемещается влево (пунктир на фиг.З), механизм 3 резки отрезает провода, механизм 4 направления концов проводов освобождает их: сомкнутые направляющие 40 клином 45 через системы рычагов и кулачок на приводе размыкаются, образуя просвет для прохода проводов. Затем транспортер 5 поворачивается на один шаг, узел 2 подачи проводов подает очередной участок провода 23 и направляющие 40 после возврата клина 45 смыкаются пружинами 42, зажима провод 23, При повороте транспортера 5 захват 6 с проводами и платой перемещается к механизму 11 предварительной гибки, где оправка 24 посредством тяги 30 поднимается, а прижим 25 поджимает захват 6 с платой 21 и лепестками 22 к оправке 24. Затем ползун 27 с гибочным элементом на конце при помощи клина 31, перемещаясь вправо, а оправка 28 посредством штока 29, опускаясь, огибают конец лепестка 22 вокруг оправки 24, после чего все гибочные элементы в той же последовательности возвращаются в исходное положение при помощи пружин - ползу i 27 пружиной 32 (остальные пружины не показаны). При повороте Транспортера 5 на очередной шаг захват 6 кулачком 37 переводится из вертикального положения в горизонтальное и перемещается к механизму 2 окончательной гибки для окончательного закрепления проводов 23 в лепестках 22 посредством бойка 33 и наковальни 35 (фиг,7).На следующем шаге транспортера производится припайка соединений паяльниками 13, далее кулачок 39 нажимает на клин 16, освобождая провода, а механизм 14 снятия готовых изделий сбрасывает готовое изделие в тару (не показана).
Платы с лепестками поднимаются по спиральному лотку 46 вибробункера 7, Первая плата перемещается в приемное гнездо 47 до упора 48 приемл ника 49, подпружиненный (пружины не показаны) шибер-отсекатель 50
от кулачка блока кулачков 36 через рычаг 51 опускается, отсекая плату от общего потока, затем пружиной 52 при посредстве кулачка блока 36 и штоков 53 через стойку 54 перемещает плату в гнездо 8 захвата 6, опирающегося на кронштейн 55, затем шибер-отсекатель при помощи пружины 56
Q поднимается и кулачком блока 36 перемещается вправо в исходное положение. Кулачок 38 переводит захват 6 из горизонтального положения в вертикальное, и цикл повторяется.
5 Таким образом, описанное устройство позволяет автоматизировать сборку и пайку гибких, не поддающихся рихтовке проводов с лепестками на плате.
0 Формула изобретения
«
1.Автоматическое сборное устройство для сборки и пайки монтажных проводов с лепестками на плате, содержащее
5 расположенные на станине узел подачи проводов, направляющий механизм, механизм резки проводов, рабочий стол, механизм присоединения проводов и привод, отличающееся
0 тем, что, с целью автоматизации процесса сборки п пайки и расширения технологических возможностей, оно снабжено вибробункером для подача плат на сборку и механизмом снятия готовых изделий, рабочий стол выполнен в виде поворотного транспортера с установленными на нем, с возможностью поворота вокруг своих горизонтальных осей захватами проводов с выполненными в них гнездами для плат, а механизм присоединения проводов представляет собой последовательно установленные на станине по периметру рабочего стола механизмы предварительной и окончательной гибки и паяльники. 2,Устройство по п,1, о тли -
5
0
5
чающееся тем, что направляющий механизм выполнен в виде двух прижимных пластин, установленных на основании с возможностью смыкания и размыкания под действием пружин и клина, связанного с приводом устройства, причем на обращенных друг к ДРУгу поверхностях пластин выполнены
I
пазы, образующие в сомкнутом положении конические отверстия,
3,Устройство поп.1, отличающееся тем, что захват проводов представляет собой основание, на поверхности которого с одной стороны выполнен выступ и установлены подпружиненные к выступу прижимные губки, а между выступом и прижимны- , ми губками установлен двойной клин, взаимодействующий с приводом устройства, а с противоположной от выступа стороны выполнено гнездо для платы с плоской пружиной для удержания пла- JQ ты в гнезде
4.Устройство по п§1, отличающееся тем, что механизм предварительной гибки выполнен в ви де двух расположенных на одной оси i двуплечих рычагов с гибочными оправ-
15752578
ками на концах и снабжен двумя ползунами, установленными с возможностью горизонтального возв ратно-поступа- тельного перемещения, один из которых служит прижимом, другой несет на себе Гибочную оправку, а вторые концы рычагов и ползуны кинематически Связаны с приводом устройства.
5.Устройство по п,1, отличающееся тем, что механизм окончательной Гибки снабжен наковальней и бойком, выполненным на одном конце двуплечего рычага, а другой конец рычага связан с приводом устройства.
15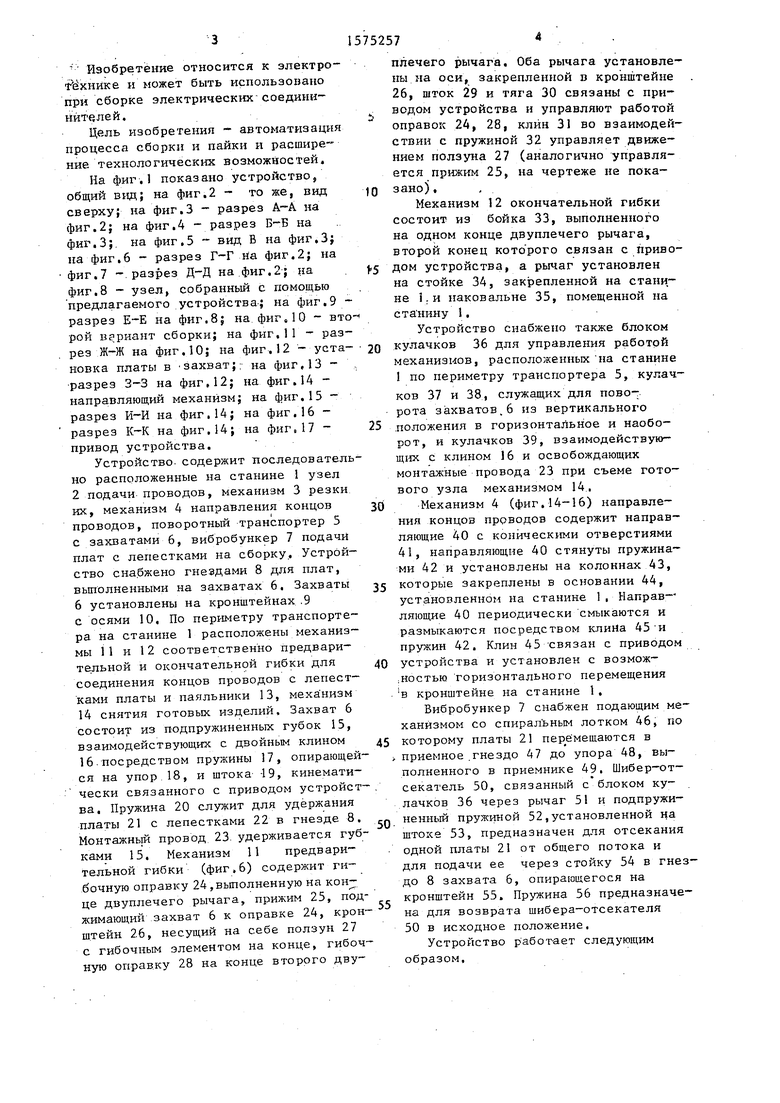

| название | год | авторы | номер документа |
|---|---|---|---|
| Полуавтомат для сборки, склейки и пайки монтажных проводов со звуковой катушкой в динамических головках | 1988 |
|
SU1663669A1 |
| Устройство для монтажа радиоэлементов на печатных платах | 1985 |
|
SU1363545A1 |
| Устройство для сборки резьбовых соединений | 1985 |
|
SU1328138A1 |
| Сборочная линия | 1985 |
|
SU1255352A1 |
| Устройство для сборки деталей типа вал-втулка | 1974 |
|
SU516499A1 |
| РОТОРНАЯ МАШИНА СБОРКИ | 1992 |
|
RU2014195C1 |
| Установка для изготовления изделий из ленты | 1981 |
|
SU1178556A1 |
| Устройство для изготовления изогнутых деталей | 1977 |
|
SU733787A1 |
| Устройство для сборки каркаса переменного резистора с корпусом | 1981 |
|
SU955223A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |

Изобретение относится к электротехнике. Цель изобретения - автоматизация процесса сборки и пайки и расширение технологических возможностей. Устройство состоит из станины 1 с укрепленным на ней круговым транспортером, вибробункера 7 для подачи плат на сборку, узла подачи проводов 2 с механизмом резки 3 и направляющим механизмом 4. Устройство снабжено гнездами для плат, выполненными на захватах 6, а захваты установлены на кронштейнах с осями, обеспечивающими возможность поворота вокруг этих осей при движении по периметру транспортера. На станине расположены два механизма соединения концов привода с лепесками 11, 12, паяльники 13 для пайки мест соединения концов проводов с лепестками и механизм снятия готовых изделий 14. Из вибробункера 7 плата попадает в захват 6 и далее перемещается по позициям посредством транспортера. Отрезанные механизмами 3 провода зажимаются в захвате 6 и далее перемещаются вместе с платой. Механизмы 11 и 12 производят механическое соединение лепестков платы с проводами. Затем плата поступает к паяльнику 13 на пайку и даллее к механизму 14, где выталкивается из гнезда захвата 6. Таким образом, описанное устройство позволяет автоматизировать сборку и пайку и гибких, не поддающихся рихтовке проводов с лепестками на плате. 1 с.п. 4 з.п. ф-лы, 17 ил.
Фиг.З
S-8
.Б-В
Фиг. 4
29
Фиг. 6
Д-А 20 Л33
В ид В
22
.21 ,8
-20
tf
Фиг 12
Фиг.ю
I
«XJ
55
f4
Ж
V
Ј
u
5s
e
M
23 303 Г
Фиг,Л
Vff
| 0 |
|
SU334027A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
