Изобретение относится к области диагностирования транспортных сельско хозяйственных, например, колесных тракторов, машин.
Целью изобретения является повышег ние точности измерения сходимости управляемых колес транспортного сред- ства.
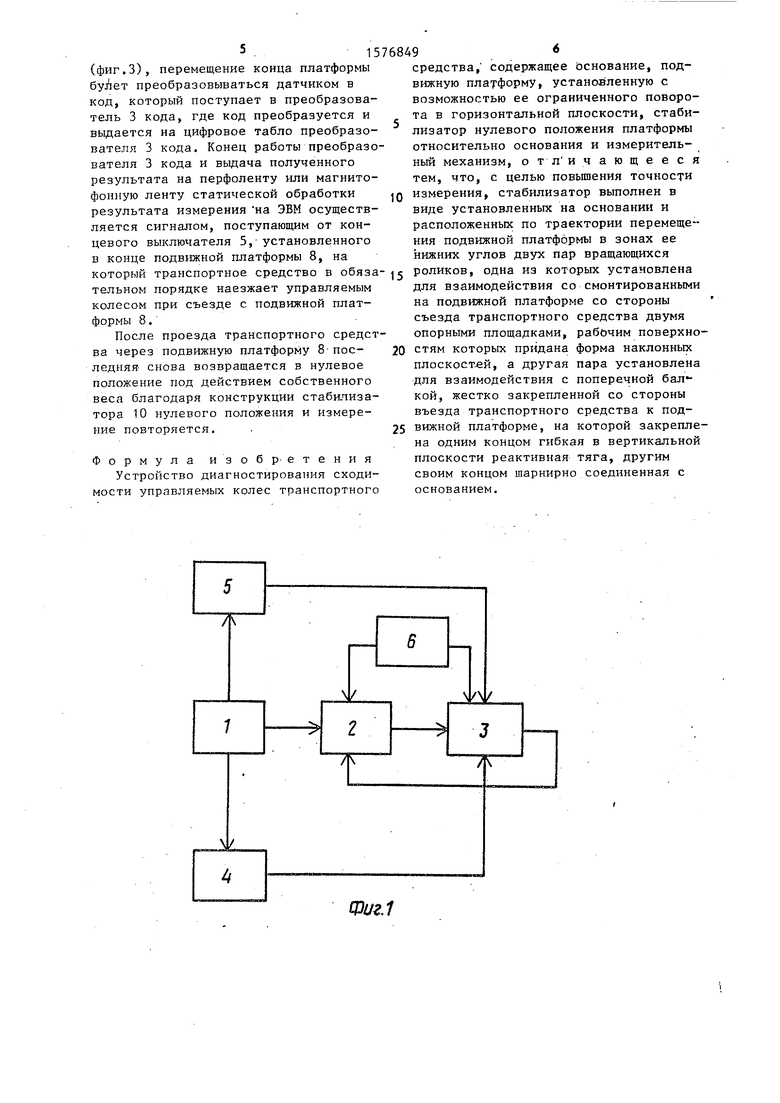
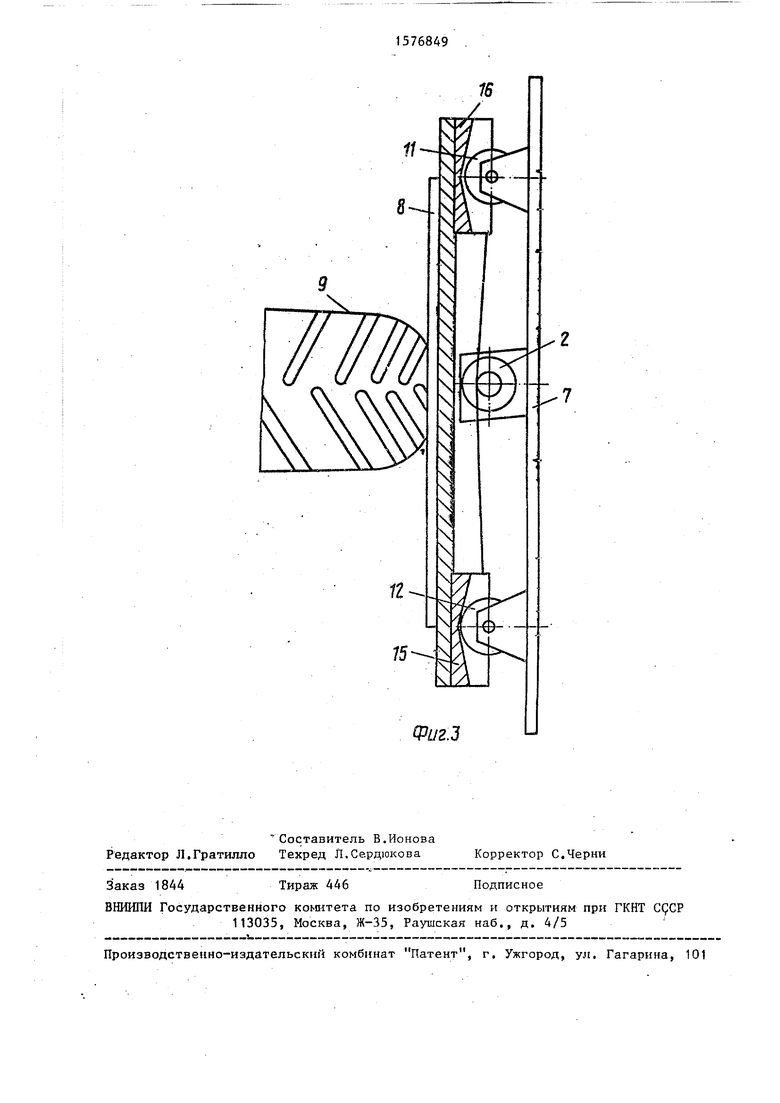
На фиг.1 изображена блок-схема устройства; на фиг.2 - устройство, общий вид; на фиг.З - подвижная платформа, вид спереди и исходное положение.
Устройство (фиг.1) включает в себя механическую часть 1, измерительный механизм, который включает датчик 2 угловых перемещений, преобразователь 3 кода, концевые выключатели 4 и 5 и источник б питания.
Механическая часть 1 устройства состоит (фиг.2) из основания 7, подвижной платформы 8 с колесом 9, стабилизатора 10 нулевого положения, кото- рый включает в себя две пары вращающихся роликов 11 и 12, 13 и 14, опорные площадки 15 и 16 и поперечную балку 17„-Вращающиеся ролики 11 и 12 установлены на основании 7 и располо- жены по касательной перемещения подвижной платформы 8 в зонах ее нижних углов и взаимодействуют с опорными площадками 15 и 16. Опорные площадки 15 и 16 жестко прикреплены к подвиж- ной платформе 8 со стороны съезда транспортного средства. Рабочим поверхностям опорных площадок 15 и 16 придана форма наклонных плоскостей, которые, прокатываясь по вращающимся роликам 11 и 12 при перемещениях подвижной платформы 8 в сторону от нулевого положения, приподнимают ее, что создает усилие, зависящее от угла наклона плоскостей и веса подвижной платформы 8, для ее движения назад. Равновесие наступает лишь в самой верхней точке смыкания наклонных плоскостей каждой из площадок 15 и 16, что будет соответствовать нулевому положению подвижной платформы 8.Вторая пара вращающихся роликов 13 и 14 взаимодействует с поперечной балкой 17, которая также жестко прикреплена
5
0
5
0 5 0 5
0
5
с противоположной стороны подвижной платформы, т.е. со стороны въезда транспортного средства. Эта сторона подвижной платформы 8 жестко крепится к реактивной тяге 18, которая своим вторым концом через шарнир 19 крепится к основанию 7. Такое соединение позволяет подвижной платформе 8 совершать угловые перемещения в горизонтальной и вертикальной плоскостях и не даёт подвижной платформе 8 смещаться в продольном направлении, что необходимо для функционирования стабилизатора 10 нулевого положения.
Начало преобразования поступающего кода с датчика 2 угловых перемещений в преобразователь 3 кода определяется сигналом, поступающим с концевого выключателя 4, расположенного по ходу движения транспортного средства.
Конец работы преобразователя 3 кода, запоминание полученного результата определяются сигналом, поступающим от концевого выключателя 5, расположенного в конце подвижной платформы 8 на съезде.
Устройство работает следующим образом.
Перед замером включается блок 6 питания (фиг.1), транспортное средство одним из управляемых колес проезжает по концевому выключателю 4, сбрасывая результаты предыдущего замера и устанавливая на нуль преобразователь 3 коца, при дальнейшем поступательном движении колеса 9 начинается процесс преобразования угла поворота подвижной платформы 8 в соответствующий код. В случае отклонения величины сходимости от нормативного значения под действием боковой силы происходит поворот подвижной платформы 8 вокруг шарнира 19, тем самым выводится из нулевого положения подвижная платформа 8, которая перемещается по роликам 13 и 14 со стороны наезда (фиг.2) и по роликам 11 и 12 со стороны съезда (фиг.З) транспортного средства. В виду того, что конец подвижной платформы 8 на съезде кинематически связан с датчиком 2 угловых перемещений
(фиг.З), перемещение конца платформы булет преобразовываться датчиком в код, который поступает в преобразователь 3 кода, где код преобразуется и выдается на цифровое табло преобразователя 3 кода. Конец работы преобразователя 3 кода и выдача полученного результата на перфоленту или магнитофонную ленту статической обработки результата измерения на ЭВМ осуществляется сигналом, поступающим от концевого выключателя 5, установленного в конце подвижной платформы 8, на
средства, содержащее основание, подвижную платформу, установленную с возможностью ее ограниченного поворота в горизонтальной плоскости, стабилизатор нулевого положения платформы относительно основания и измерительный механизм, отл ичающееся тем, что, с целью повышения точности измерения, стабилизатор выполнен в виде установленных на основании и расположенных по траектории перемещения подвижной платформы в зонах ее нижних углов двух пар вращающихся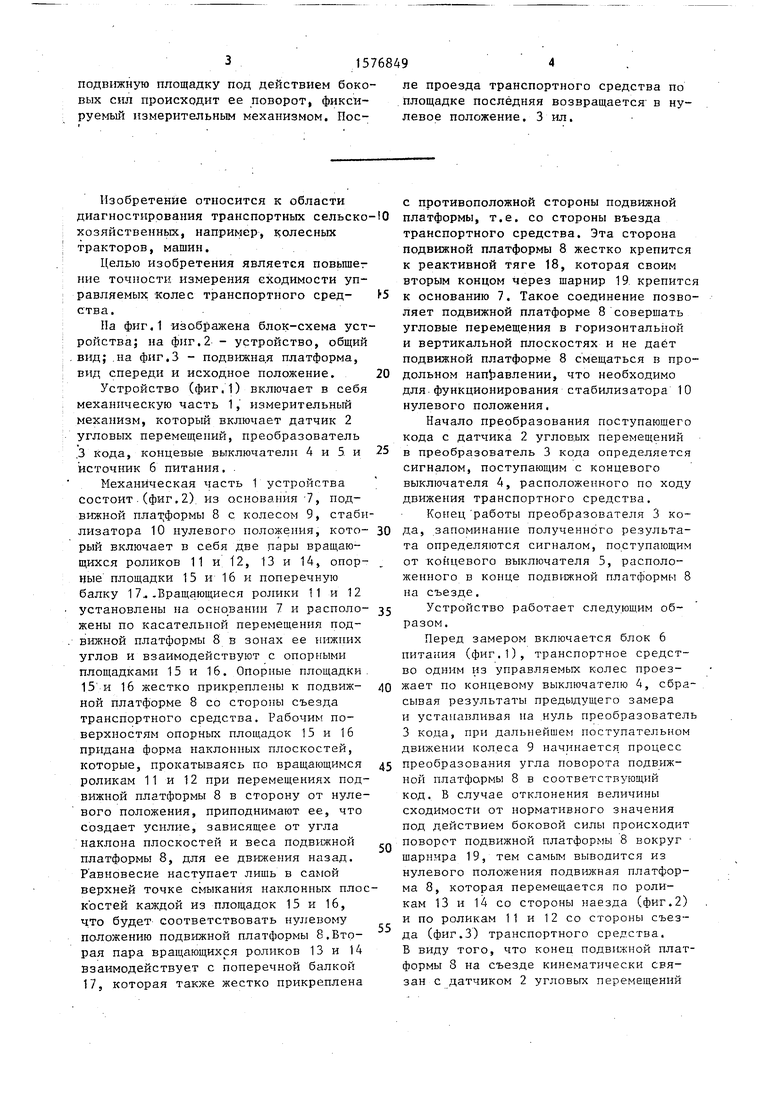
Изобретение относится к диагностированию транспортных сельскохозяйственных, например, колесных тракторов, машин. Целью изобретения является повышение точности измерения сходимости управляемых колес. Стабилизатор нулевого положения устройства выполнен в виде установленных на основании двух пар вращающихся роликов 11, 12 и 13, 14, одна пара роликов 11, 12 взаимодействует со смонтированными на подвижной платформе со стороны съезда транспортного средства двумя опорными площадками 15, 16, рабочим поверхностям которых придана форма наклонных плоскостей, а вторая пара роликов 13, 14 взаимодействует с поперечной балкой 17, жестко прикрепленной со стороны въезда транспортного средства к подвижной платформе, на которой в свою очередь жестко закреплена одним концом гибкая в вертикальной плоскости реактивная тяга 18, другим концом шарнирно соединенная с основанием. При въезде транспортного средства на подвижную площадку под действием боковых сил происходит ее поворот, фиксируемый измерительным механизмом. После проезда транспортного средства по площадке последняя возвращается в нулевое положение. 3 ил.
который транспортное средство в обяза-jj роликов, одна из которых установлена
для взаимодействия со смонтированными на подвижной платформе со стороны съезда транспортного средства двумя опорными площадками, рабочим поверхно
тельном порядке наезжает управляемым колесом при съезде с подвижной платформы 8.
После проезда транспортного средства через подвижную платформу 8 последняя снова возвращается в нулевое положение под действием собственного веса благодаря конструкции стабилизатора 10 нулевого положения и измерение повторяется.
Формула изобретения
Устройство диагностирования сходимости управляемых колес транспортного
Фиг.1
роликов, одна из которых установлена
для взаимодействия со смонтированными на подвижной платформе со стороны съезда транспортного средства двумя опорными площадками, рабочим поверхностям которых придана форма наклонных плоскостей, а другая пара установлена для взаимодействия с поперечной балкой, жестко закрепленной со стороны въезда транспортного средства к подвижной платформе, на которой закреплена одним концом гибкая в вертикальной плоскости реактивная тяга, другим своим концом шарнирно соединенная с основанием.
Составитель В.Ионова Редактор Л.Гратилло Техред Л.Сердюкова
Заказ 1844
Тираж 446
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ С(СР 113035, Москва, Ж-35, Раушская наб., д. 4/5
От - . ... « ниЛ т ия пт. ч- т-чяl дци ч .- «.«. и ц «ц. «4-1 ч. „ „. - ,-i-..
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
Фиг.З
Корректор С.Черни
Подписное
| Устройство диагностирования сходимости управляемых колес транспортного средства | 1987 |
|
SU1449861A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
