(54) УРАВНИВАЮЩИЙ МОСТИК

| название | год | авторы | номер документа |
|---|---|---|---|
| Уравнивающий мостик | 1985 |
|
SU1261873A1 |
| Уравнивающий мостик | 1981 |
|
SU1129160A1 |
| Уравнивающий мостик | 1974 |
|
SU517548A1 |
| Уравнивающий мостик | 1978 |
|
SU796140A1 |
| УРАВНИВАЮЩИЙ МОСТИК | 1992 |
|
RU2046873C1 |
| Уравнивающий мостик для перегрузки грузов с рампы на транспортное средство | 1980 |
|
SU927697A1 |
| Станок для монтажа секций механизированной крепи и конвейера | 1990 |
|
SU1774998A3 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ ХАЛ ИЗ ПРЕДВАРИТЕЛЬНО ЗАКАТАННЫХ ТЕСТОВЫХ ЖГУТОВ | 1963 |
|
SU223714A1 |
| Уравнивающий мостик | 1983 |
|
SU1137042A1 |
| Уравнивающий мостик | 1982 |
|
SU1118595A1 |
1
Изобретение относится к механизации погрузочно-разгрузочных работ, а именно к подъемным устройствам.
Известен управляюш.ий мостик, содержаш,ий основание, на котором с возможностью подъема и опускания установлена платформа, выполненная с поворотными подпружиненными козырьками, которые соединены с концами подвижных тяг 1.
Недостатком мостика является то, что не обеспечена безопасность работы, так как поднимаемые и опускаемые платформой транспортные средства. могут опрокинуться с платформы,
Цель изобретения - повышение безопасности и удобства в работе.
Указанная цель достигается тем, что на платформе шарнирно установлен управляющий рычаг, кинематически связанный со свободными концами тяг.
Кроме того, кинематическая связь выполнена в виде ползунов, расположенных на платформе параллельно друг другу и имеющих фигурные пазы на концах, причем управляющий рычаг снабжен пальцем перемешающимся в упомянутых пазах.
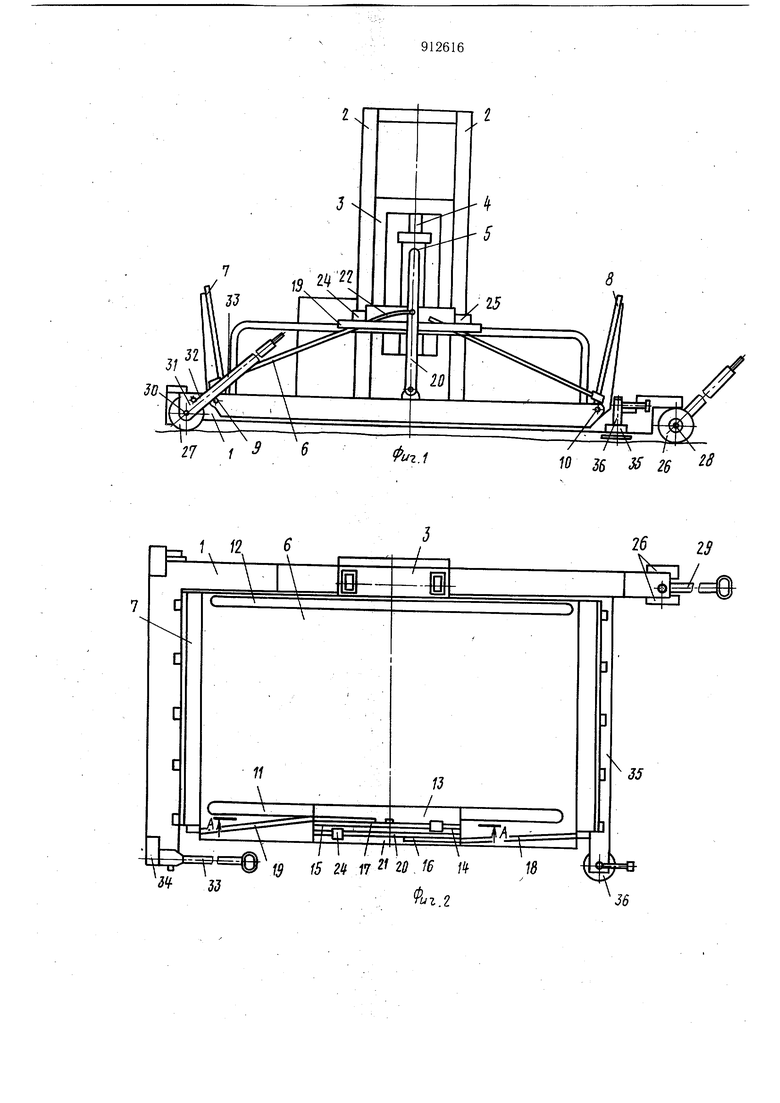
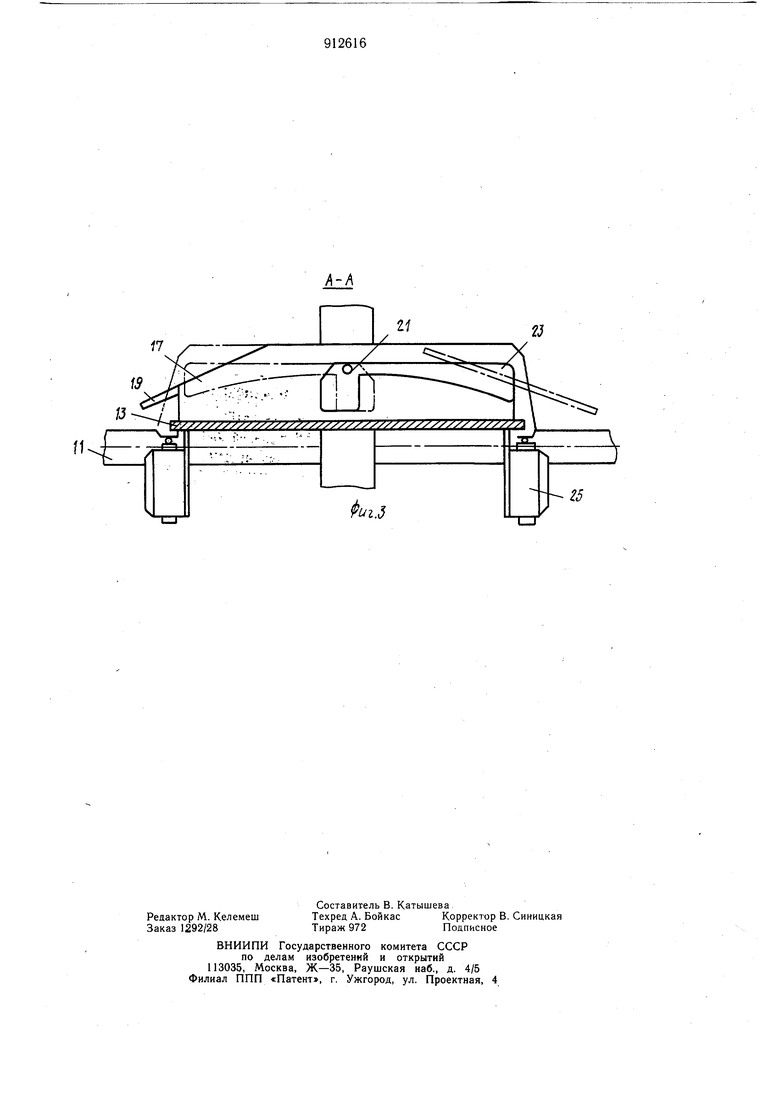
На фиг. 1 изображено устройство, общий вил, транспортное положение; на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез,А-А на фиг. 2.
Уравнивающий мостик содержит Г-об разное основание 1, на котором закреплены две вертикальные направляющие 2. В направляющих 2 с помощью опорных роликов установлена подвижная в вертикальной плоскости П-образная рама 3, которая щар10 нирно соединена со щтоком 4 .вертикального гидроцилиндра 5, установленного на основании 1. К раме 3 жестко прикреплена горизонтальная платформа 6, снабженная со сторон въезда, и выезда транспортного средства поворотными козырьками 7 и 8, установленными на осях 9 и 10. На осях 9 и 10 установлены пружины (не показаны), которые одним концом соединены с платформой 6, а другим - с козырьками 7 и 8, и удерживающие последние в поднятом
20 положении. На платформе 6 с боковых сторон установлены ограды 11 и 12 (фиг. 2). На ограде 11 образована площадка 13 с параллельными направляющими 14 и 15, в которых расположены ползуны 16 и 17.
Ползун 16 связан с одним концом тяги 18, второй конец которой шарнирно соединен с козырьком. 8, а ползун 17 (фиг. 3) посредством тяги 19 соединен с козырьком 7. На платформе 6 шарнирно установлен управляющий рычаг 20, который снабжен пальцем 21, установленным в пазу 22 ползуна 16 и в п.азу 23 ползуна 17. Управляющий рычаг 20 снабжен замком (не показан). Фигурные пазы 22 и 23 выполнены на свободных концах ползунов 16 и 17 по окружности с центром по оси управляющего рычага 20. На площадке за свободными концами ползунов 16 и 17 установлены концевые выключатели 24 и 25, подключенные в электрическую цепь привода механизма подъема и опускания платформы.
Для передвижения уравнивающего мостика на основании установлены колеса 26 и 27. Колеса 26 расположены на оси 28 и соединены с тягой 29 передвижения мостика. Колеса 27 расположены на осях 30 рычагов 31, жёстко закрепленных на оси 32. Рычаги ручкой 33 устанавливаются в транспортное положение, при котором рычаги 31 упираются в выступы 34 основания 1. К основанию перпендикулярно прикреплен кронштейн 35, на конце которого установлена винтовая опора 36.
Уравнивающий мостик работает следующим образом.
Из транспортного положения уравновешивающий мостик приводят в рабочее положение. Для этого поворотом ручки 33 убираются колеса 27, и винтовая опора опирается в грунт. Поворачивают управляющий рычаг 20 в сторону подпружиненного козырька 7, при этом палец 21 управляющего рычага 20 скользит в пазу 22 ползуна 16, и, упираясь в скос ползуна 17, приподнимает (при этом размыкается концевой выключатель) и затем перемещает его по направляющей 15 площадки 13. Ползун 17 через тягу 19 поворачивает козырек 7, который опускается вниз.
На платформе 6 устанавливают груз (транспортное средство). Управляющий рычаг 20 устанавливают в среднее положение (как показано на чертежах), при этом козырек 7 под действием пружины поворачивается вверх, перемещая через тягу 19 ползун 17, который свободным концом
нажимает на концевой выключатель 25. Концевой выключатель 25 замыкает электрическую цепь привода гидроцилиндра 5. Далее насосом рабочая жидкость подается в гидроцилиндр 5, щток 4 которого по направляющим 2 перемещает П-образную раму 3 с платформой 6 вверх. По окончании движения Г1латформы 6 управляющий рычаг 20 устанавливается в крайнее правое положение. Палец 21 управляющего рычага скользит в пазу 23 ползуна 17, и, упираясь в ползун 16, перемещает его по направляющей 14 в сторону козырька 8. Ползун 16 передвигает тягу 18, которая поворачивает козырек 8 вокруг оси 10. Козырек 8 опускается вниз, и груз (транспортное средство) снимают с платформы 6. Применение предлагаемого изобретения позволяет повысить безопасность устройства, так как при п.одъеме платформы обеспечивается стопорение груза с обоих концов козырьками, что обеспечивает достижение технико-экономического эффекта. Годовая экономия от применения изобретения составляет 8,5 тыс. руб.
Формула изобретения
Источники информации, принятые вс внимание при экспертизе 1. Авторское свидетельство СССР № 517548,,;кл. В 65 G 69/24, 1974 (прототип).
