ел
00
со го
00
со
3
Изобретение относится к машиностроению и может быть использовано в роботизированных производствах.
Целью изобретения является расширение технологических возможностей магнитного захвата путем снижения давления захвата на деталь.
На фиг. 1 показано устройство, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1.
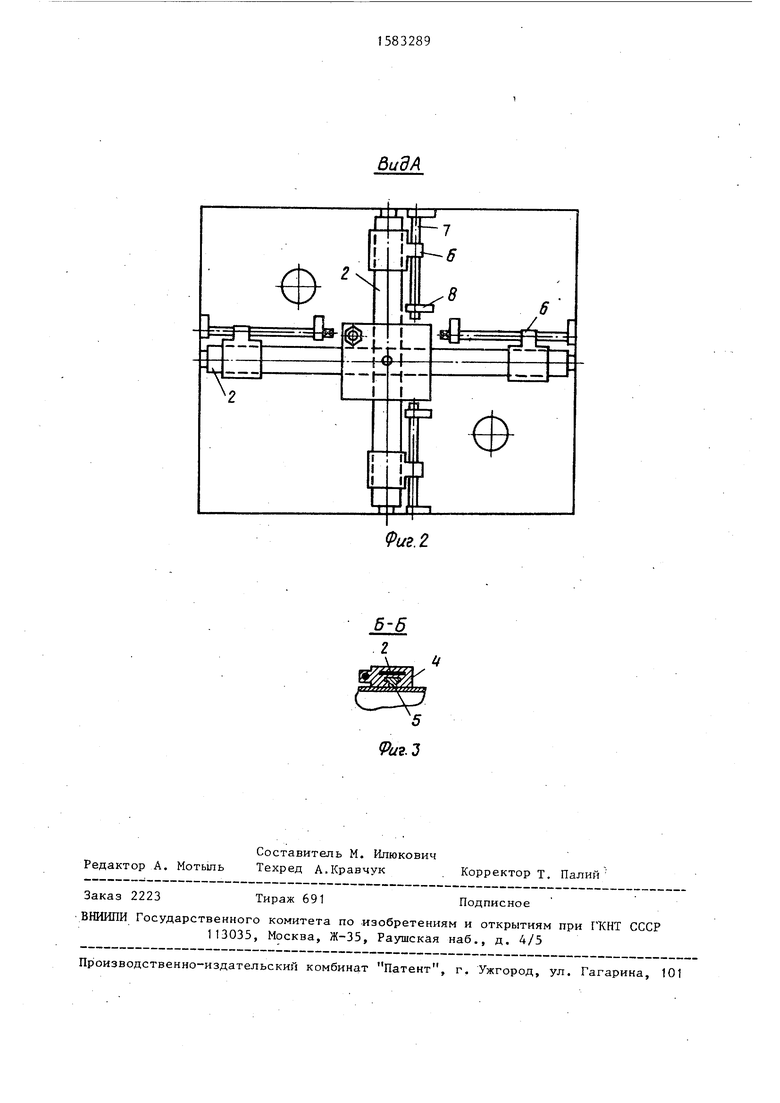
Устройство содержит основание 1, на котором с помощью плоских пружин 2 установлен корпус 3. Плоские пружины 2 одним концом закреплены на основании 1, а другим концом закреплены на опорах 4, имеющих возможность регулировочного перемещения по направляющим 5, установленным на корпусе 3. Регулировка обеспечивается с помощью гайки 6 и винта 7, установленного посредством опор 8 на корпусе 3. В корпусе 3 установлен постоянный магнит 9, На корпусе 3 установлен привод линейного перемещения магнита 9, выполненный в виде пневмоцилиндров 10. На основании 1 закреплен центрирующий штырь 11, свбодный конец которого размещен в ответном отверстии, выполненном в корпусе 3. Рабочая поверхность корпуса выполнена в виде немагнитной мембраны 13.
Устройство работает следующим образом.
0
5
Основание 1 вместе с корпусом 3 опускается на деталь 14. После касания корпуса 3 с деталью 14 деформируются плоские пружины 2 до момента, когда корпус 3 приблизится к основанию 1 на расстояние, достаточное для срабатывания бесконтактного датчика 12. После этого движение основания 1 прекращается и пневмоцилиндры 10 опускают магнит 9 в нижнее положение. Деталь 14 захватывается. Для открепления детали 14 пневмоцилиндры 10 поднимают магнит 9.
Формула изобретения
Магнитный захват для хрупких изделий, содержащий основание с установленным на нем с помощью плоских пружин корпусом, датчик положения корпуса, закрепленный на основании, и захватный элемент, установленный в корпусе, отличающийся тем, что, с целью расширения техно
логических возможностей, упомянутые плоские пружины жестко закреплены на основании одним концом, а свободные концы плоских пружин установлены на корпусе с возможностью перемещения по направляющим, при этом захватный элемент выполнен в виде постоянного магнита, а на основании закреплен центрирующий штырь, свободный конец которого размещен в ответном отверстии, выполненном в корпусе.
дидА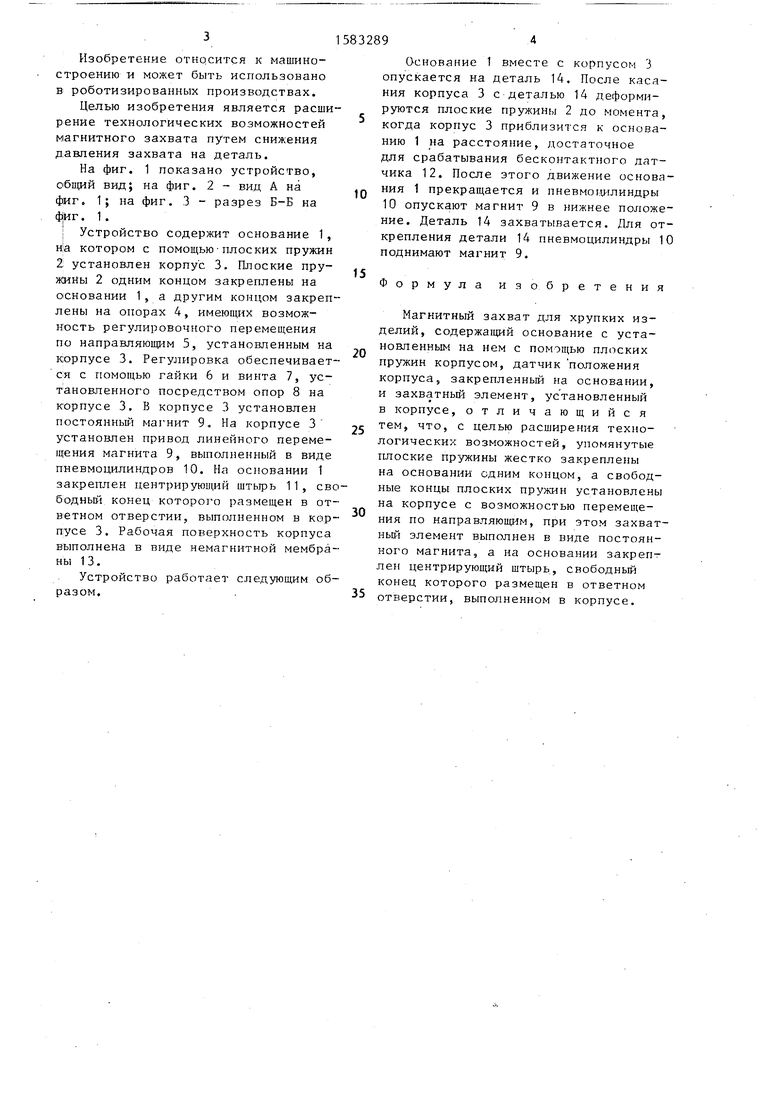
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захват | 1985 |
|
SU1263526A1 |
| Многозахватное устройство | 1986 |
|
SU1390148A1 |
| Устройство для укладки штучных изделий в тару | 1986 |
|
SU1359201A1 |
| Устройство для укладки кольцевых изделий в тару | 1986 |
|
SU1406031A1 |
| Захватное устройство | 1986 |
|
SU1333574A1 |
| ЗАХВАТ МАНИПУЛЯТОРА | 2001 |
|
RU2207246C1 |
| Устройство для накладки деталей низа обуви на след | 1977 |
|
SU735236A1 |
| Устройство для укладки штучных изделий в тару | 1988 |
|
SU1599258A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ УПРАВЛЯЕМОЙ СТЫКОВКИ РАЗЪЕМНЫХ СОЕДИНИТЕЛЕЙ КОММУНИКАЦИЙ | 2009 |
|
RU2417492C2 |
| Устройство для сборки деталей | 1980 |
|
SU942980A1 |
Изобретение относится к машиностроению и может быть использовано в робототехнике. Целью изобретения является расширение технологических возможностей магнитного захвата. Захват содержит плоские пружины 2, закрепленные концами на основании 1 и опорах 4. Последние смонтированы с возможностью ргулировочного перемещения по направляющим 5, установленным на корпусе 3. Постоянный магнит 9 может подниматься или опускаться с помощью пневмоцилиндров 10. При работе корпус 3 позиционируется на деталь 14. Основание 1 продолжает опускаться до момента срабатывания бесконтактного датчика 12 положения корпуса 3. По этому сигналу пневмоцилиндры 10 опускают магнит 9 и деталь 14 захватывается. 3 ил.
Риг. 2
| Вакуумный захват | 1985 |
|
SU1263526A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
