Изобретение относится к гидроавтоматике и может быть использовано в системах управления летательных аппаратов.
Целью изобретения является повышение устойчивости и надежности.
На чертеже изображена схема гидравлического привода.
Привод содержит, например, один цилиндрический корпус 1, разделенный на полости 2,3 поршнем 4, соединенным со штоком 5, взаимодействующим с объектом 6 управления, а также гидрораспределительное устройство (не изображено), подключенное к полостям 2,3.
Рейка 7 с последовательно размещен- ными на ней выступами 8-11 установлена параллельно оси штока 5 на наружной поверхности корпуса 1. Упругий элемент в виде пластины 12 закреплен перпендикулярно оси рейки 7 на штоке 5 с помощью дополнительно установленного рычага 13. Соединение полостей 2,3 с гидрораспределительным устройством осуществляется гидролиниями 14,15. Количество выступов, как правило, в пределах одиннадцати.
Гидравлический привод работает следующим образом.
С помощью гидpopachpeдeлитeльнoгo устройства осуществляется подача рабочей жидкости, например, в полость 2 и отвод из полости 3. Шток 5 перемещается с объектом 6 управления и рычагом 13. При колебаниях объекта 6 управления происходит и соответствующее движение поршня 4, которое может сопровождаться резонансными коле- баниями привода в целом. Весь гидравлический контур привода создает в этом случае восстанавливающую упругую силу вследствие практической несжимаемости жидкости. Модулируя эту силу путем периодического изменения условий взаимодействия корпуса 1 и штока 5 при движении последнего во время колебаний объекта б управления (из-за периодического попадания пластины 12 во впадины между вы- ступами 8-11), создают периодические пульсации коэффициента восстанавливающей силы (КВС) в приводе. Уравнение движения в таком случае имеет вид (ур.Матье)
q-f-(b+/i(t))q 0,
где q - обобщенная координата; t - время;
V(t)Vb ±AV Vb - среднее значение пульсаций;
пульсации КВС;
//-.относительная глубина пульсаций;
b - постоянная.
Устойчивость подобной системы полностью определяется значением/г ист Vo/v, где V , Vo - текущая и средняя частоты пульсаций КВС, причем области устойчивости определяются эмпирически или, например, по диаграмме Мейснера и Айнса-Стретта. Из анализа этих диаграмм следует, что легко подбираются нужные частоты и глубины пульсаций, наиболее удобные в реализации в конкретной механической системе (т.е. размер выступов 8-11, расстояние между ними и упругость пластины 12). В результате как обычный, так и более опасный вследствие своей широкополосности параметрический резонанс возникать не будет (упомянутые диаграммы см. Пановко Л.Г. Введение в теорию механических колебаний. М.: Наука, 1980, рис. 10.1 и 11:1).
Формула изобретения
1. Гидравлический привод, содержащий по меньшей мере один цилиндрический корпус, разделенный на полоети поршнем со штоком, взаимодействующим с объектом управления, а также гидрораспределительное устройство, подключенное к полостям корпуса, рейку с последовательно размещенными на ней выступами, установленную параллельно оси штока, и упругий элемент для взаимодействия с выступами, отличающийся тем, что, с целью повышения устойчивости и надежности, рейка размещена на наружной поверхности корпуса, а упругий элемент закреплен на штоке с помощью дополнительно установленного рычага.
2. Привод по П.1, отличающийся тем, что Упругий элемент выполнен в виде пластины, закрепленной перпендикулярно оси рейки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический привод | 1988 |
|
SU1585561A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ПРЕССОМ | 1998 |
|
RU2152309C1 |
| Тренажер для развития мышц верхних конечностей | 2017 |
|
RU2645663C1 |
| Съемный ковш погрузочной машины | 1985 |
|
SU1230983A2 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ НАТЯЖЕНИЯ ПРИ ПРЕССОВАНИИ МЕТАЛЛОВ | 2005 |
|
RU2278758C1 |
| ПНЕВМАТИЧЕСКИЙ (ГИДРАВЛИЧЕСКИЙ) СЛЕДЯЩИЙ ПРИВОД, БЛОК КОНЕЧНЫХ ВЫКЛЮЧАТЕЛЕЙ, ПРЕОБРАЗОВАТЕЛЬ ВРАЩЕНИЯ И РАСПРЕДЕЛИТЕЛЬ ДЛЯ ПНЕВМАТИЧЕСКОГО (ГИДРАВЛИЧЕСКОГО) СЛЕДЯЩЕГО ПРИВОДА | 1995 |
|
RU2087752C1 |
| Способ генерирования вибрации и пульсации потока и устройство для его осуществления | 2024 |
|
RU2835940C1 |
| Захватное устройство для плавного вертикального перемещения груза | 1978 |
|
SU695152A1 |
| АМОРТИЗАТОР | 2000 |
|
RU2184891C2 |
| АМОРТИЗАТОР | 2002 |
|
RU2234015C1 |
Изобретение относится к гидроавтоматике и может быть использовано в системах управления летательных аппаратов. Целью изобретения является повышение устойчивости и надежности. С помощью гидрораспределительного устройства осуществляется подача рабочей жидкости, например, в полость 2 и отвод из полости 3. Шток 5 перемещается с объектом 6 управления и рычагом 13. При колебаниях объекта 6 управления происходит соответствующее движение поршня 4, которое может сопровождаться резонансными колебаниями привода в целом. Весь гидравлический контур привода создает в этом случае восстанавливающую упругую силу вследствие практической несжимаемости жидкости. Модулируя эту силу путем периодического изменения условий взаимодействия корпуса 1 и штока 5 при движении последнего из-за периодического попадания пластины 12 во впадины между выступами 8,9, 10,11, создают периодические пульсации восстанавливающей силы. Это направлено на исключение как обычного, так и параметрического резонанса привода. 1 з.п.ф-лы, 1 ил.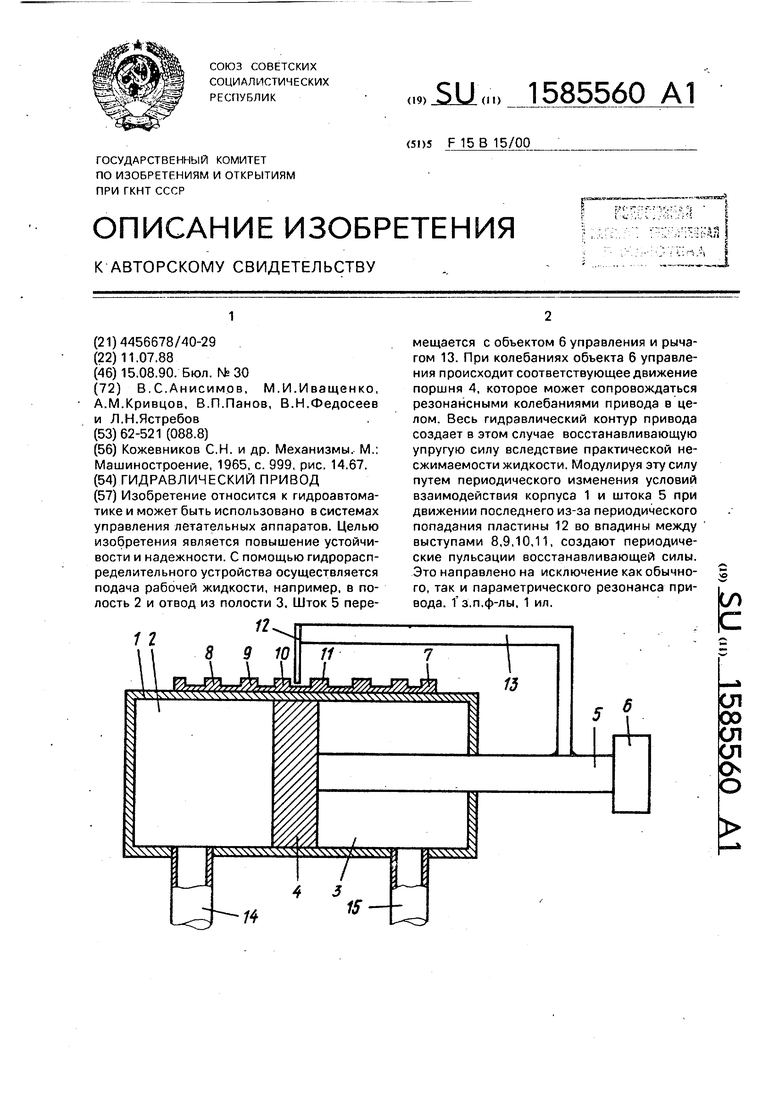
| Кожевников С.Н | |||
| и др | |||
| Механизмы | |||
| М.: Машиностроение, 1965, с | |||
| Приспособление к автомобилю для езды по рельсам | 1922 |
|
SU999A1 |
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
