W
п
ел
о
ел
ел
Изобретение относится к сельскохозяйственному машиностроению и может быть использовано к системах автоматическог о вождения CAB самоходных сельскохозяйственных машин и тракторои,
Цель изобретенияновьинение устойчивости вождения, упрон1ение конструкции и снижение материалоемкости.
На фиг. 1 изображена принципиальная схема САБ самоходной сельскохознйсг- венной машины; на фиг. 2 - электрогидравлическая схема.
CAB состоит из рамы 1, прикрепленной к балке переднего управляемого моста 2 самоходной машины, правого 3 и левого 4 щупов, Н1арнирно прикрепленных на радиальпых подвесках 5 к поперечной гяю (), становленной шарнирно на двух рычагах 7, которые шарпи|)но закреплена иа раме 1. К поперечной гя- ге 6 нюрнирно кренится двуплечий ры чаг 8. и; Д1)1Ч1М конце которого распо.чо жена .1лическая п.пастинка 9, взаимо действуюнитя с индикационными щелевыми преобразователями U) типа IlHIIJ-6-l. усга- новленными на поперечной тяге 1 1 рулевой трапепии с возможностью изменения расстояния между ними. Для поворота управ;1яе и 1х колес имеется гидроци;|индр 12, а для перевода щупов из TpaHCH(jni- Hoi o ноложения в рабочее и обратно - |-идроиилиндр 13.
Злекгрогидравлическая схема системы (фиг. 2) включает насосную станцию 14. в с(я таве когорой имеются насосы рулевого управления 15 п основной гидросистемы 16, гидрораспределитель 17, нанрав- ляющий жидкость 1 гидроцилинд|1 13, иасос-дозатор 18, гидрораснределитель 19 рулевогс) унравлепия с ::)лект1)о.магнитами 20, кран 21, унрав,тяемые колеса 22, аккуму лягорную батарею 23, ык.тючате;1ь 24, контрольную лампочку 25, трубопроводы и электропровода.
Система работает следуюшим образ(ш.
При нодаче рабочей жидкости в норшне- вую по.юсть гидроцилиндра 13 П1уны 3 и 4 опускаюгси и )ядья и К1|Ж.1Ы11 из них контак1ир ег с дном и стенками двух соседш1х б(1розд или с корнями сахарной свеклы, и.чи с рядками растений. Одновременно переключается кран 21 из ручного управ, 1епия на авгоматическое и BK/IKJ- чается элекгрическая цепь выключатс,|ем 24.
Если борозды иск)ив.1яются вправо, uiy- iibi 3 и 4 под де1а твием бокового усилия о1К,|опяются в ту же С1орон, и поперечная тяга 6 вместе с рычаг.чми 7 также отклоиигся вп)аво и повериег дву- н, 1ечи й 8. Металлическая п/кк гина 9 зайдет в сквозной наз левого индукционного преобразователя К), и включится один из электромагнитов 20 (фиг. 2), иереместив золотник гидрораспределителя 19 в, 1ево. При рабочая жидкосгь от насоса 15 направляется через гидрораспределитель 19 и кран 21 в штоковую полость гидроцилиндра 12, Управляемые колеса 22 повернутся вправо, и поперечная
рулевая тяг а 11 переместится вместе с индукционными преобразователями влево, Взаимодействие между индукционными преобразователями 10 и металлической пластинкой 9 прекратится, электромагнит 20 обесточится, и золотник гидрораспределителя 19 под действием пружин возвратится в нейтральное положение, соответствующее определенному углу поворота управляемых колес 22. При отклонении щупов в другую сторону система отработает сиг5 нал на поворот управляемых колес влево. Установка индукционных преобразователей И) на пот:еречной тяге 11 рулевой трапеции оГм спечиваег местную отрицательную обратную связь. При этом исключается (бходимость применения индукционного преобразовате.ля обратной связи и электронного блока для суммирования сигналов прямой и обратной связи и выдачи сиг- . на повороте колес или гидроцилиндра обратной связи.
5При подьеме щупов в транспортное
положение кран переводится в положение «Ручпое управление и отключается пита- liiie элект)ически.м током системы, а лампочка 25 в кабине водителя гаснет. Поворот KO,:iec осуществляется как и в обыч0 ном режиме ручного управления. Управление золотником гидрораспределителя проис- хоДит от насоса-дозатора.
Наличие крана 21 обеспечивает изменение ноюка рабочей жидкости. Это необ- .ходимо, чт.)бы насос-дозатор не работал
5 в режиме гидромотора и не вращал ру- ,левое колесо нри автоматическом управлении во избежание повреждения рук ме- ханизато)а.
0
40
Формула изобретения
1. Электрогидравлическая система автоматического вождения сельскохозяйственной MBiHHHbi, содержащая щупы с механизмами подвески и передачи сигналов,
5 электрогидравлическую схему управления с нассх ом-дозатором, сообщенным с рулевым колесом,и гидрорасиределителем,связанную с гидроцилиндром новорота колес и меха- пизмо.м подт,ема щупов в транспортное по- ложепие, рулевую гранецию с двумя ин0 дукционпыми преобразовате.тями и метал- лическо п,1астинсж, установленной с возможностью взаимодействия со сквозными пазами ин.тукционных преобразовате.чей, подключенных к электрогидравлической схеме управления, отличающаяся тем, что, с целью повышения устойчивости вождения, упропхения конструкции и снижения материалоемкости, индукционные преобразовате- . 111 уста11ов,1ены на гтоперечной тяге руле5
вой трапеции, а металлическая пластина - на одном конце двуплечего рычага, другой конец которого шарнирно соединен с опорной поперечной тягой, связанной со щупами и посредством механизма перемещения в горизонтальной плоскости с рамой сельскохозяйственной машины. 2. Система по п. 1, отличающаяся тем, что параллельно выходам насосадозатора установлен кран, а каждая управляющая полость гидрораспределителя снабжена электромагнитом, подключенным к выходу соответствующего индукционного преобразователя.
3. Система по п. 1, отличающаяся тем, что индукционные преобразователи установлены с возможностью изменения расстояния между ними.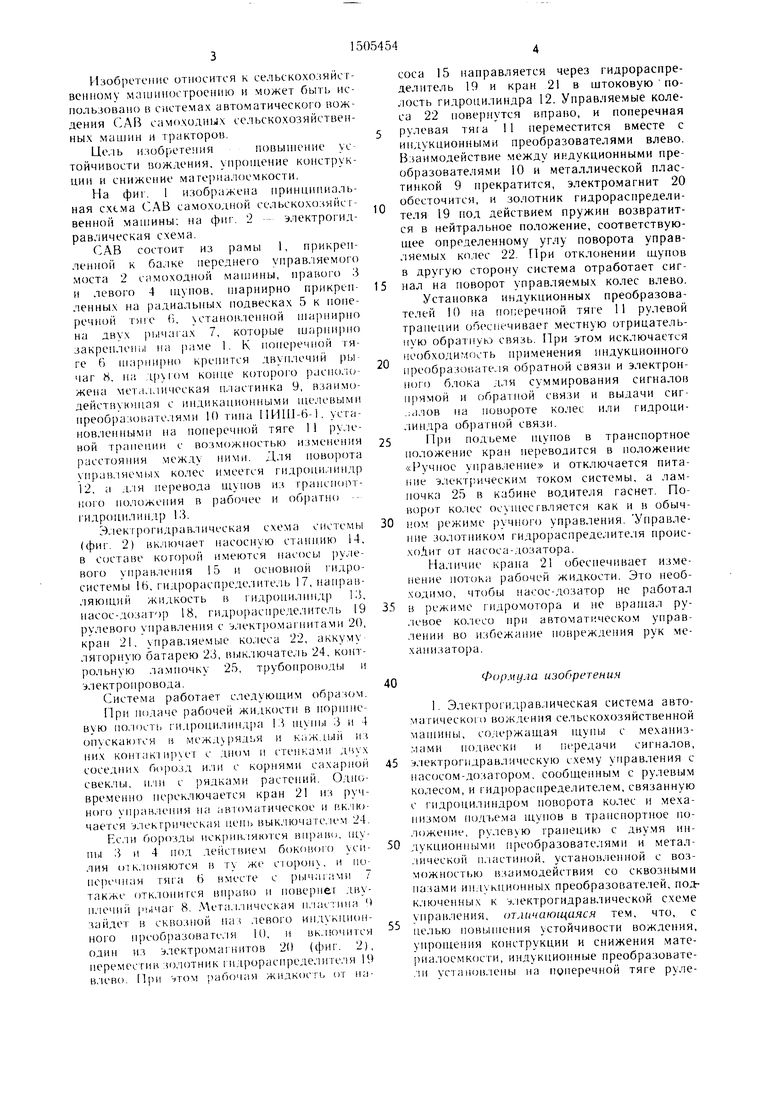
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая система автоматического вождения сельскохозяйственной машины | 1987 |
|
SU1586548A1 |
| Система автоматического вождения сельскохозяйственной машины по борозде | 1985 |
|
SU1387888A1 |
| Копирующее устройство для автоматического вождения сельскохозяйственной машины по борозде | 1981 |
|
SU959649A1 |
| Гидромеханическое устройство для автоматического вождения сельскохозяйственной машины по борозде | 1988 |
|
SU1604184A1 |
| Устройство для управления самоходной сельскохозяйственной машиной | 1983 |
|
SU1122251A1 |
| Устройство для автоматического направления движения самоходной сельскохозяйственной машины | 1980 |
|
SU948308A1 |
| Самоходная сельскохозяйственная машина | 1987 |
|
SU1440376A1 |
| Самоходная корнеклубнеуборочная машина | 1982 |
|
SU1090276A1 |
| Копирующее устройство для автоматического вождения сельскохозяйственной машины по борозде | 1980 |
|
SU882440A1 |
| Устройство управления самоходной сельскохозяйственной машиной | 1990 |
|
SU1752215A1 |

Изобретение относится к области сельскохозяйственного машиностроения и может быть использовано в системах автоматического вождения самоходных сельскохозяйственных машин и тракторов. Цель изобретения - повышение устойчивости вождения, упрощение конструкции и снижение материалоемкости. Система состоит из рамы 1, прикрепленной к балке переднего управляемого моста 2 с/х машины, двух щупов 3 и 4, шарнирно прикрепленных на радиальных подвесках 5 к опорной поперечной тяге 6, установленной шарнирно на двух рычагах 7, которые шарнирно закреплены на раме 1. К опорной поперечной тяге 6 шарнирно крепится двуплечий рычаг 8, на другом конце которого расположена металлическая пластинка 9, взаимодействующая с индукционными щелевыми преобразователями 10. Для обеспечения отрицательной обратной связи индукционные преобразователи 10 установлены на поперечной тяге 11 рулевой трапеции с возможностью изменения расстояния между ними. Параллельно выходам насоса-дозатора установлен кран. 2 з.п.ф-лы, 2 ил.
S
фиг. 2
| Система автоматического вождения сельскохозяйственной машины по борозде | 1985 |
|
SU1387888A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
