Изобретение относится к обработке металлов давлением и. может быть использовано для отделения верхнего листа от стопы и подачи его в зону обработки.
Цель изобретения - улучшение условий обслуживания, повышение надежности работы при отделении.и подачи ферромагнитных электропроводящих листов.
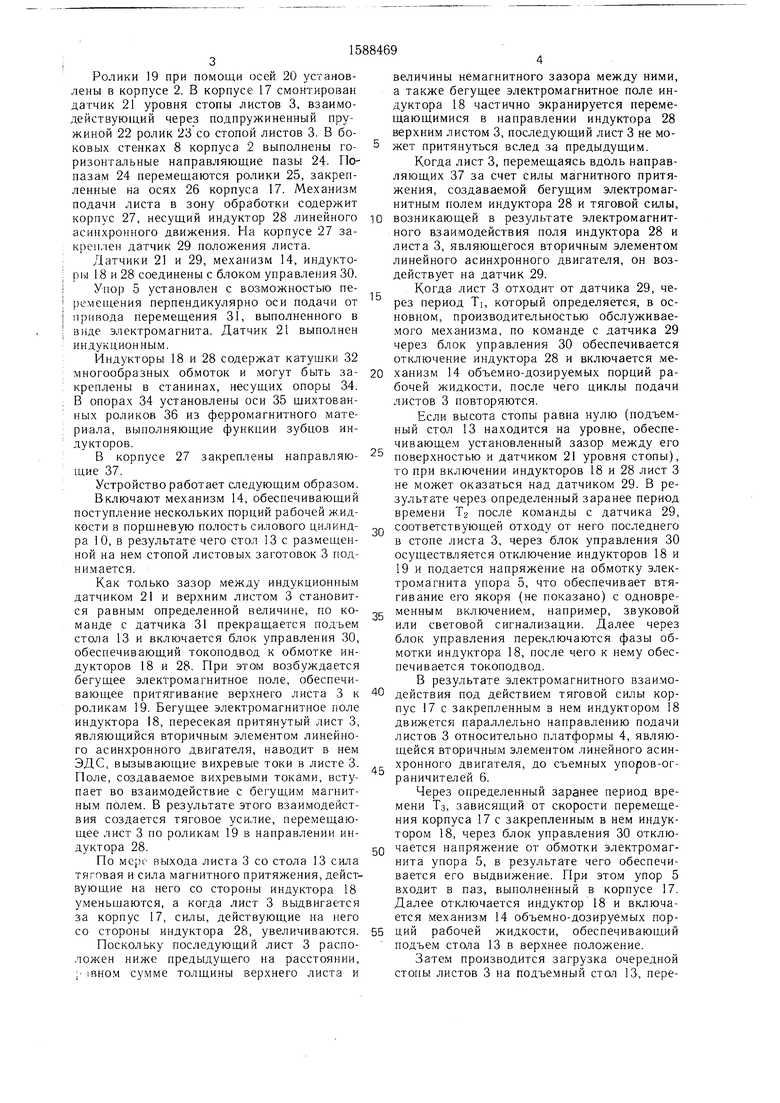
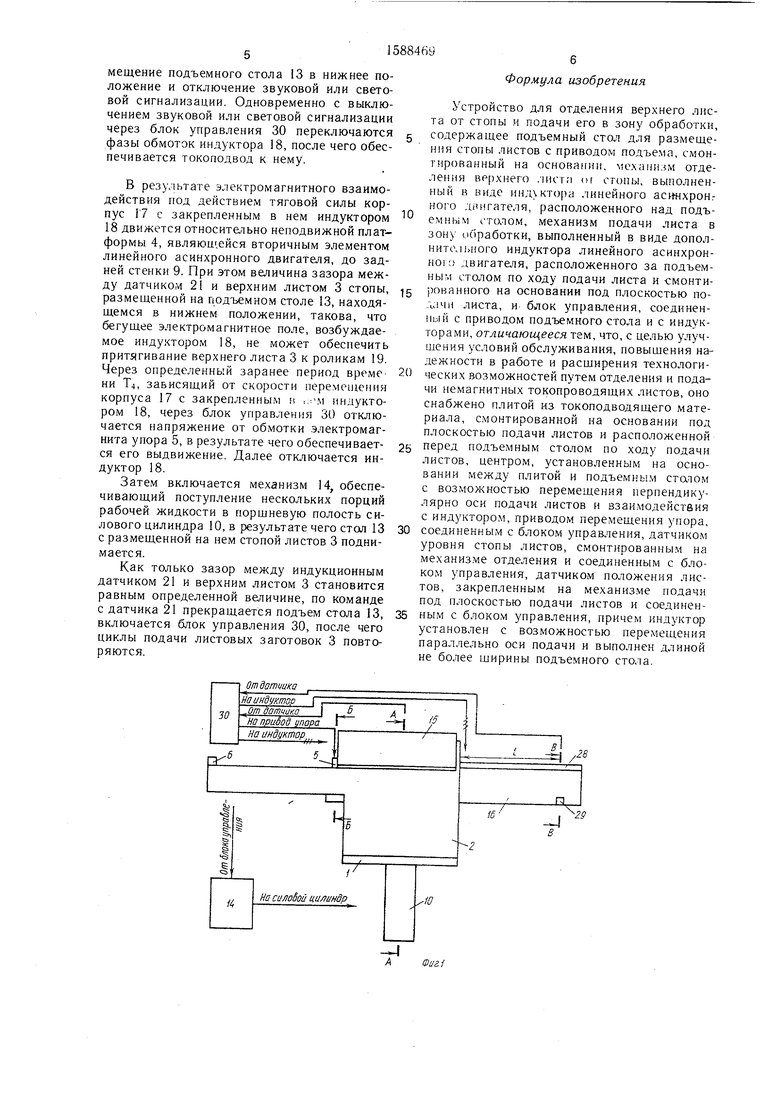
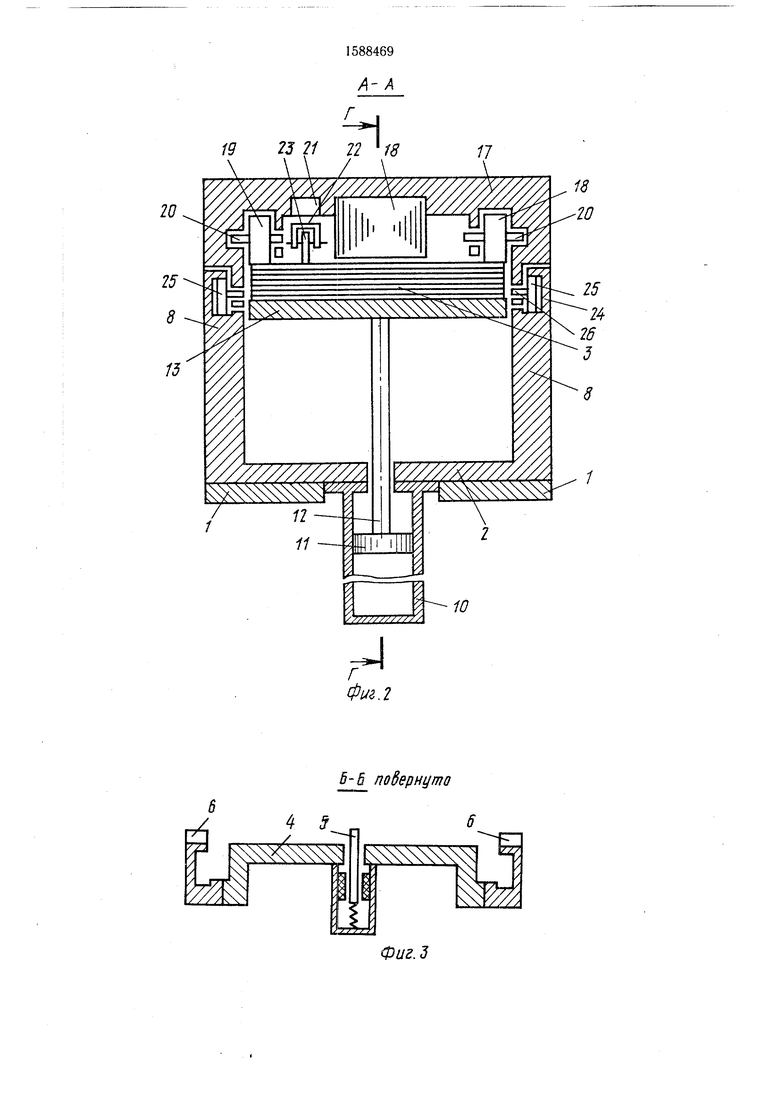
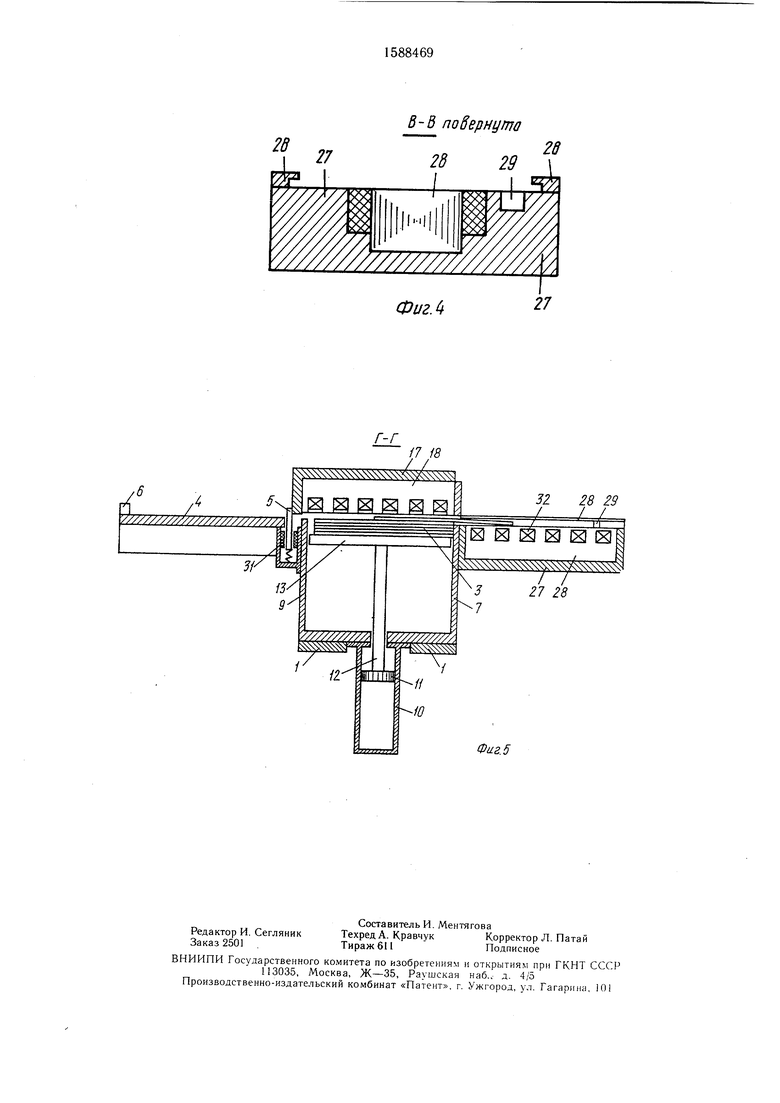
На фиг. ; изображено устройство для отделения верхнего листа от стопы и подачи его в зону обработки; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг на фиг. 5 - разрез Г-Г на фиг. 2.
Устройство содержит основание 1, корпус 2 для размещения в нем стопы листов 3 платформу 4, выполненную в виде плиты из то- копроводящего материала, упор 5 упорь1-ограничите;1и 6. Корпус 2 содержит переднюю стенку 7 со щелью для прохода листов 3 боковые стенки 8 и заднюю стенку 9. Под корпусом 2 смонтирован привод подъема содержащий силовой цилиндр 10, на порщ- не 11 которого закреплен шток 12. На штоке 12 смонтирован подъемный стол 13 для размещения стопы листов 3. Цилиндр 10 соединен с механизмом 14 подачи объем- но-дозиру емых порций рабочей жидкости Устройство содержит также механизм 15 отделения верхнего листа и механизм 16 подачи листа в зону обработки (не показано).
Механизм отделения верхнего листа от стопы содержит корпус 17, несущий индуктор 18 линейного асинхронного двигателя ролики 19.
сд
00 00
4
О)
;о
Ролики 19 при помощи осей 20 установлены в корпусе 2. В корпусе 17 смонтирован датчик 21 уровня стопы листов 3, взаимодействующий через подпружиненный пружиной 22 ролик 23 со стопой листов 3. В боковых стенках 8 корпуса 2 выполнены го- 5 ризонтальные направляющие пазы 24. По- пазам 24 перемещаются ролики 25, закрепленные на осях 26 корпуса 17. Механизм подачи листа в зону обработки содержит корпус 27, несущий индуктор 28 линейного асинхронного движения. На корпусе 27 закреплен датчик 29 положения листа. ; Датчики 21 и 29, механизм 14, индукто- ры 18 и 28 соединены с блоком управления 30. Упор 5 установлен с возможностью пе- I ремещения перпендикулярно оси подачи от I привода перемещения 31, выполненного в : виде электромагнита. Датчик 21 выполнен индукционным.
Индукторы 18 и 28 содержат катушки 32
10
15
величины немагнитного зазора между ними, а также бегущее электромагнитное поле индуктора 18 частично экранируется перемещающимися в направлении индуктора 28 верхним листом 3, последующий лист 3 не может притянуться вслед за предыдущим.
Когда лист 3, перемещаясь вдоль направляющих 37 за счет силы магнитного притяжения, создаваемой бегущим электромагнитным полем индуктора 28 и тяговой силы, возникающей в результате электромагнитного взаимодействия поля индуктора 28 и листа 3, являющегося вторичным элементом линейного асинхронного двигататя, он воздействует на датчик 29.
Когда лист 3 отходит от датчика 29, через период TI, который определяется, в основном, производительностью обслуживаемого механизма, по команде с датчика 29 через блок управления 30 обеспечивается отключение индуктора 28 и включается мемногообразных обмоток и могут быть за- 20 ханизм 14 объемно-дозируемых порций ра- креплены в станинах, несущих опоры 34.бочей жидкости, после чего циклы подачи
В опорах 34 установлены оси 35 щихтован-листов 3 повторяются,
ных роликов 36 из ферромагнитного материала, выполняющие функции зубцов инЕсли высота стопы равна нулю (подъемный стол 13 находится на уровне, обеспедукторов.чивающем установленный зазор между его
В корпусе 27 закреплены направляю- 25 поверхностью и датчиком 21 уровня стопы), щие 37.то при включении индукторов 18 и 28 лист 3
Устройство работает следующим образом.не может оказаться над датчиком 29. В реВключают механизм 14, обеспечивающийзультате через определенный заранее период
35
40
поступление нескольких порций рабочей ж;ид- кости в порщневую полость силового цилинд- „,. ра 10, в результате чего стол 13 с размещенной на нем стопой листовых заготовок 3 поднимается.
Как только зазор между индукционным датчиком 21 и в-ерхним листом 3 становится равным определенной величине, по команде с датчика 31 прекращается подъем стола 13 и включается блок управления 30, обеспечивающий токоподвод к обмотке индукторов 18 и 28. При этом возбуждается бегущее электромагнитное поле, обеспечивающее притягивание верхнего листа 3 к роликам 19. Бегущее электромагнитное поле индуктора 18, пересекая притянутый лист 3, являющийся вторичным элементом линейного асинхронного двигателя, наводит в нем ЭДС, вызывающие вихревые токи в листе 3. Поле, создаваемое вихревыми токами, вступает во взаимодействие с бегущим магнитным полем. В результате этого взаимодействия создается тяговое усилие, перемещающее лист 3 по роликам 19 в направлении индуктора 28.
По MCjje {выхода листа 3 со стола 13 сила тяговая и сила магнитного притяжения, действующие на него со стороны индуктора 18 уменьшаются, а когда лист 3 выдвигается за корпус 17, силы, действующие на него со стороны индуктора 28, увеличиваются. 55
Поскольку последующий лист 3 расположен ниже предыдущего на расстоянии, : iBHO.M сумме толщины верхнего листа и
45
50
времени Tg после команды с датчика 29, соответствующей отходу от него последнего в стопе листа 3, через блок управления 30 осуществляется отключение индукторов 18 и 19 и подается напряжение на обмотку электромагнита упора 5, что обеспечивает втягивание его якоря {не показано) с одновременным включением, например, звуковой или световой сигнализации. Далее через блок управления переключаются фазы обмотки индуктора 18, после чего к нему обеспечивается токоподвод.
В результате электромагнитного взаимодействия под действием тяговой силы корпус 17 с закрепленным в нем индуктором 18 движется параллельно направлению подачи листов 3 относительно платформы 4, являющейся вторичным элементом линейного асинхронного двигателя, до съемных упоров-ограничителей 6.
Через определенный заранее период времени Тз, зависящий от скорости перемещения корпуса 17 с закрепленным в нем индуктором 18, через блок управления 30 отключается напряжение от обмотки электромагнита упора 5, в результате чего обеспечивается его выдвижение. При этом упор 5 входит в паз, выполненный в корпусе 17. Далее отключается индуктор 18 и включается механизм 14 объемно-дозируемых порций рабочей жидкости, обеспечивающий подъем стола 13 в верхнее положение.
Затем произЕЮДится загрузка очередной стопы листов 3 на подъемный стол 13, пере
величины немагнитного зазора между ними, а также бегущее электромагнитное поле индуктора 18 частично экранируется перемещающимися в направлении индуктора 28 верхним листом 3, последующий лист 3 не может притянуться вслед за предыдущим.
Когда лист 3, перемещаясь вдоль направляющих 37 за счет силы магнитного притяжения, создаваемой бегущим электромагнитным полем индуктора 28 и тяговой силы, возникающей в результате электромагнитного взаимодействия поля индуктора 28 и листа 3, являющегося вторичным элементом линейного асинхронного двигататя, он воздействует на датчик 29.
Когда лист 3 отходит от датчика 29, через период TI, который определяется, в основном, производительностью обслуживаемого механизма, по команде с датчика 29 через блок управления 30 обеспечивается отключение индуктора 28 и включается мезультате через определенный заранее период
5
0
,.
5
5
0
времени Tg после команды с датчика 29, соответствующей отходу от него последнего в стопе листа 3, через блок управления 30 осуществляется отключение индукторов 18 и 19 и подается напряжение на обмотку электромагнита упора 5, что обеспечивает втягивание его якоря {не показано) с одновременным включением, например, звуковой или световой сигнализации. Далее через блок управления переключаются фазы обмотки индуктора 18, после чего к нему обеспечивается токоподвод.
В результате электромагнитного взаимодействия под действием тяговой силы корпус 17 с закрепленным в нем индуктором 18 движется параллельно направлению подачи листов 3 относительно платформы 4, являющейся вторичным элементом линейного асинхронного двигателя, до съемных упоров-ограничителей 6.
Через определенный заранее период времени Тз, зависящий от скорости перемещения корпуса 17 с закрепленным в нем индуктором 18, через блок управления 30 отключается напряжение от обмотки электромагнита упора 5, в результате чего обеспечивается его выдвижение. При этом упор 5 входит в паз, выполненный в корпусе 17. Далее отключается индуктор 18 и включается механизм 14 объемно-дозируемых порций рабочей жидкости, обеспечивающий подъем стола 13 в верхнее положение.
Затем произЕЮДится загрузка очередной стопы листов 3 на подъемный стол 13, перемещение подъемного стола 13 в нижнее положение и отключение звуковой или световой сигнализации. Одновременно с выключением звуковой или световой сигнализации через блок управления 30 переключаются фазы обмоток индуктора 18, после чего обеспечивается токоподвод к нему.
В результате электромагнитного взаимодействия под действием тяговой силы корФормула изобретения
10
пус 17 с закрепленным в нем индукторо м 18 движется относите тьно неподвижной платформы 4, являющейся вторичным элементом линейного асинхронного двигателя, до задней стенки 9. При этом величина зазора между датчиком 21 и верхним листом 3 стопы, ic размещенной на подъемном столе 13, находящемся в нижнем положении, такова, что бегущее электромагнитное поле, возбуждаемое индуктором 18, не может обеспечить притягивание верхнего листа 3 к роликам 19. Через определенный заранее период времени Т4, зависящий от скорости перемещении корпуса 17 с закрепленным и ,,.м индуктором 18, через блок управления 30 отключается напряжение от обмотки электромагнита упора 5, в результате чего обеспечивается его выдвижение. Далее отключается индуктор 18.
Затем включается механизм 14, обеспечивающий поступление нескольких порций рабочей жидкости в порщневую полость сиУстройство для отделения верхнего ли та от стопы и подачи его в зону обработк содержащее подъемный стол для размеще ния стопы листов с приводом подъема, смон тированный на основании, механизм отде верхнего .-IMCT.- or стопы, выполнен ный в виде инд ктора линейного аси«хрон ного длигателя, расположенного над подъ емным столом, механизм подачи листа зону обработки, выполненный в виде допол нител1 иого индуктора линейного асинхрон ною двигателя, расположенного за подъем ным столом по ходу подачи листа и -смонти рованного на основании под плоскостью по дачи листа, и- блок управления, соединен ный с приводом подъемного стола и с индукторами, отличающееся тем, что, с целью улучшения условий обслуживания, повыщения на дежности в работе и расщирения технологических возможностей путем отделения и подачи немагнитных токопроводящих листов, оно снабжено плитой из токоподводящего мате риала, смонтированной на основании под плоскостью подачи листов и расположенной 25 перед подъемным столом по ходу подачи листов, центром, установленным на основании между плитой и подъемным статом с возможностью перемещения перпендикулярно оси подачи листов и взаимодействия с индуктором, приводом перемещения упора.
20
c 5 S™ 3-Кяк -гпг,,,. 000 механизме отделения и соединенным с блоКак только зазор между индукционнымком управления, датчиком поюжения тис
датчиком 21 и верхним листом 3 становитсятов, закрепленным нГ мехаГзме гшдач-и
равным определенной величине, по командепод плоскостью подачи пистов и соединен
с датчика 21 прекращается подъем стола 13,35 ным с блоком управления приче, инд™
включается блок управления 30, после чегоустановлен с во зможнос;ью перемещ ния
пяются ™ ° ° ° °-параллельно оси подачи и выполнен длишй
не более щирины подъемного стола.
Формула изобретения
0
c
Устройство для отделения верхнего листа от стопы и подачи его в зону обработки, содержащее подъемный стол для размещения стопы листов с приводом подъема, смонтированный на основании, механизм отде- верхнего .-IMCT.- or стопы, выполненный в виде инд ктора линейного аси«хрон.- ного длигателя, расположенного над подъемным столом, механизм подачи листа в зону обработки, выполненный в виде допол- нител1 иого индуктора линейного асинхронною двигателя, расположенного за подъемным столом по ходу подачи листа и -смонтированного на основании под плоскостью подачи листа, и- блок управления, соединенный с приводом подъемного стола и с индукторами, отличающееся тем, что, с целью улучшения условий обслуживания, повыщения надежности в работе и расщирения технологических возможностей путем отделения и подачи немагнитных токопроводящих листов, оно снабжено плитой из токоподводящего материала, смонтированной на основании под плоскостью подачи листов и расположенной 5 перед подъемным столом по ходу подачи листов, центром, установленным на основании между плитой и подъемным статом с возможностью перемещения перпендикулярно оси подачи листов и взаимодействия с индуктором, приводом перемещения упора.
0
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отделения верхнего листа от стопы и подачи его в зону обработки | 1988 |
|
SU1666251A1 |
| Установка для обработки листового материала | 1990 |
|
SU1828778A1 |
| Установка для разделения листового материала | 1987 |
|
SU1484484A1 |
| Способ поштучного отделения ферромагнитных листов от стопы и подачи их в зону обработки и устройство для его осуществления | 1990 |
|
SU1712044A1 |
| Устройство для отделения от стопы и перемещения ферромагнитных листов в зону обработки | 1988 |
|
SU1637913A1 |
| Устройство для подачи материала в зону обработки | 1988 |
|
SU1538965A1 |
| Способ подачи ферромагнитного материала в зону обработки и установка для его осуществления | 1990 |
|
SU1741954A1 |
| Устройство для перемещения ферромагнитных листов | 1987 |
|
SU1465159A1 |
| Устройство В.А.Соломина для отделения ферромагнитных листов от стопы и подачи их в зону обработки | 1988 |
|
SU1538970A1 |
| Устройство для поштучной подачи пластин | 1985 |
|
SU1279019A1 |
Изобретение относится к обработке металлов давлением и может быть использовано для отделения верхнего листа от стопы и подачи его в зону обработки. Цель изобретения - улучшение условий обслуживания и повышение надежности работы. Устройство содержит подъемный стол с приводом для размещения стопы листов, механизм отделения верхнего листа, выполненный в виде индуктора линейного асинхронного двигателя, расположенного над подъемным столом, механизм подачи листа в зону обработки, выполненный в виде дополнительного индуктора линейного асинхронного двигателя, расположенного за механизмом отделения по ходу подачи листа под плоскостью подачи, блок управления, соединенный с приводом стола и индукторами. Механизм отделения (индуктора) установлен с возможностью перемещения параллельно оси подачи. Датчик положения листа установлен за механизмом подачи. Плита из токопроводящего материала находится по одну из сторон механизма отделения. Имеется упор с приводом между механизмом отделения и плитой. Блок управления соединен с приводом упора, датчиком положения и датчиком уровня, установленным на механизме отделения. 5 ил.
Oin датчика
Наиндуктоо
30
От датчим
Но приоод упора
На индуктор,.
f-T
На силовой нимндр
-II.
В
2S
-10
А
cPi/zi
И
Фиг.2
6-В побернуто
4
/
з
10
INSS
Фиг.З
В-В ПО Зерну та
Фиг Л
31 28 29 / / /
Фиг. 5
| Устройство для штамповки деталей из листового материала | 1985 |
|
SU1263409A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для перемещенияфЕРРОМАгНиТНыХ лиСТОВ изНАКОпиТЕля | 1979 |
|
SU804122A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| /У | |||
