Изобретение относится к машиностроению и может найти применение при роботизированной сборке изделий и при автоматизации других технологических процессов.
Цель изобретения - расширение технологических возможностей и повьш1е- ние производительности за счет осуществления подачи захваченной детали вдоль оси схвата.
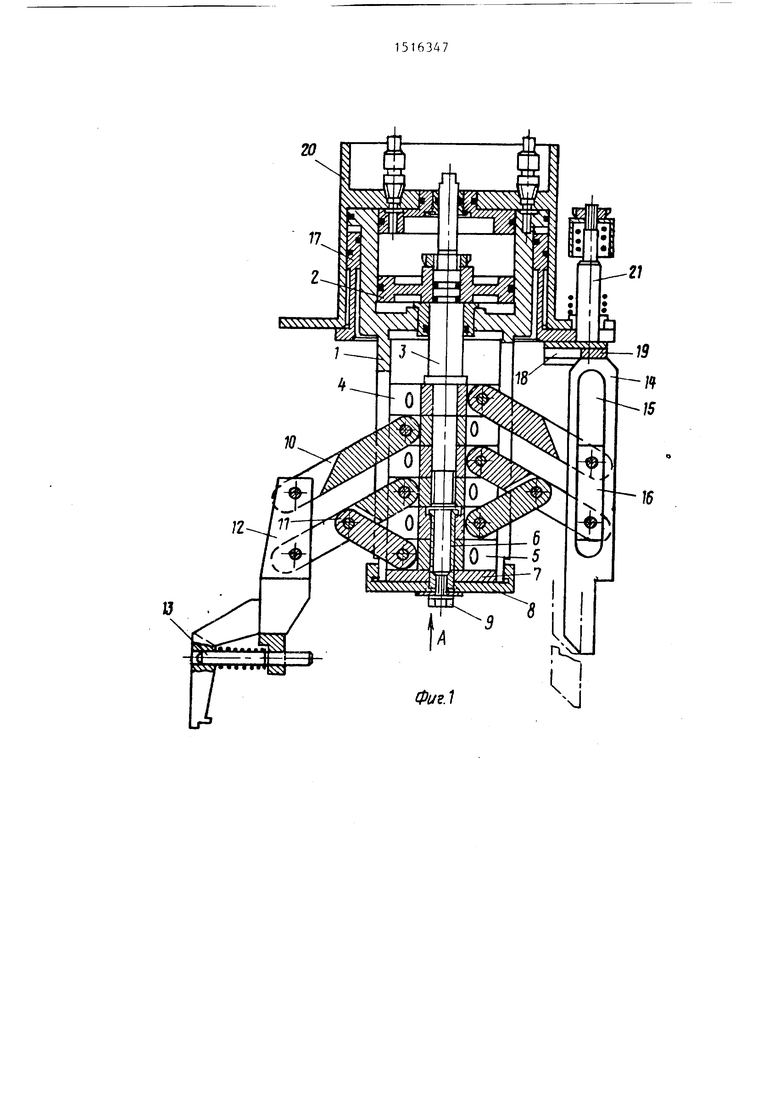
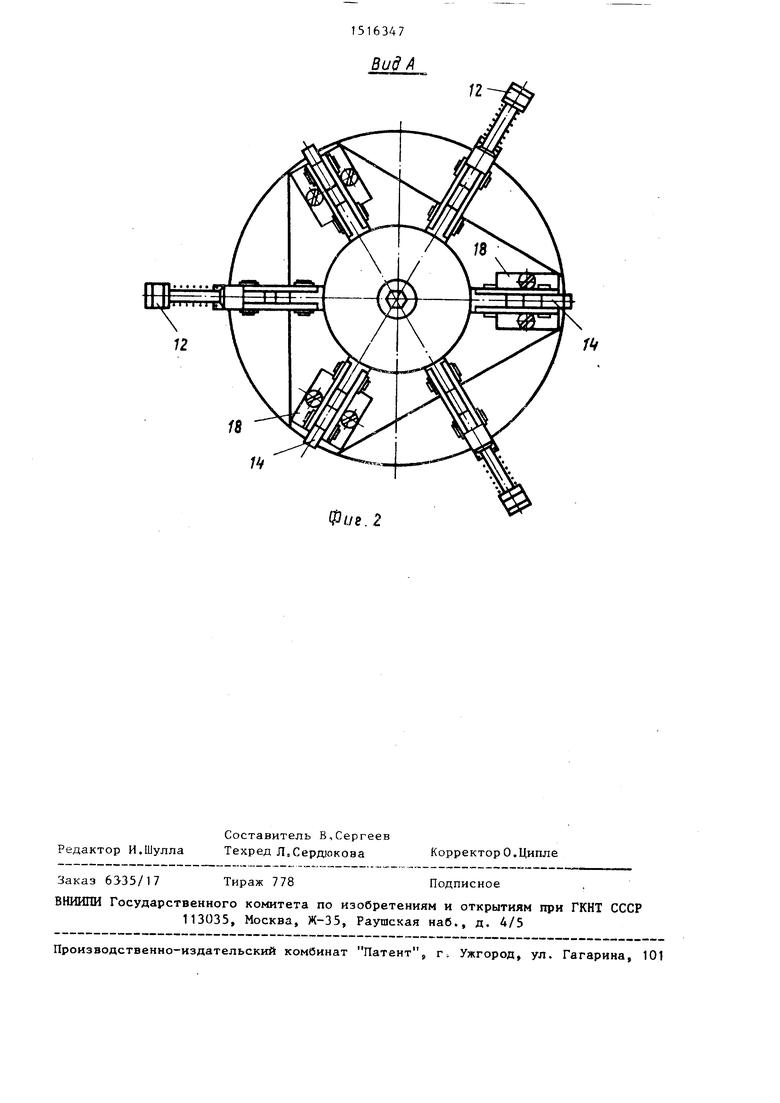
На фиг.1 изображен схват, сечение по губкам зажима и дополнительным губкам; на фиг.2 - вид А на фиг.1.
Схват промышленного робота состоит из корпуса 1, внутри которого размещен поршень 2, закрепленный на тяге 3. На тяге 3 установлены крепежные элементы 4. В корпусе 1 установлены такие же крепежные элементы 5, которые крепятся к корпусу втулкой 6 через диск 7, крьш1ку 8 с болтом 9. С крепежными элементами 4 соединены большие рычаги 10, с крепежными элементами 5 - малые рычаги 11. На больших рычагах 10 устанавливается зажимная комбинированная губка 12, в которой имеется подпружиненный штифт 13. На рычагах 10 также устанавливается дополнительная губка 14, в которой выполнен паз 15. В пазу 15 ус- jтановлен сухарь 16, соединенный с ры: чагами 10. На корпусе 1 установлен дополнительный поршень 17, на котором крепится направляющая 18 с Т-образным пазом, в котором находится ползун 19, установленный на дополнительной губке 14. На корпусе 1 установлена гильза 20, через которую проходят
СД
О5 СлЭ 4
подпружиненные направляющие 21, соединенные с дополнительным поршнем 17
Схват промьшшенного робота работает следующим образом.
Ко1 да сжатый воздух поступает в надпоршневую область, то поршень 2 идет вниз вместе с тягой 3 и крепежными элементами 4. Элементы 5 остаются при этом неподвижны. Движение через большие 10 и малые 11 рычаги передается трем зажимным губкам 12 и трем дополнительным губкам 14, которые при этом расходятся. Ползун 19 вместе с дополнительной губкой 14 перемещается по Т-образному пазу в направляющей 18. Когда поступает сжатый воздух в надпорщневую полость дополнительного поршня 17,.то поршень 17 идет вниз, воздействуя при этом через направляющую 18, ползун 19 на дополнительные губки 14, которые при этом тоже опускаются вниз, скользя своим пазом 15 по установленному на рычагах 10 сухарю 16. Возвращается на исходное место дополнительнЬш поршень 17 под действием подпружиненных направляюш 1х 21. Когда сжатый воздух поступает в подпоршневую полость поршня 2, то поршень идет вверх, а зажимные губки 12 и дополнительные губки 14 при этом сходятся В этом положении также возможно вер
тикальное перемещение дополнительных
губок.
Формула изобретения
Схват промышленного робота, содержащий корпус, рычаги с губками захвата, привод перемещения рычагов, выполненный в виде силового цилиндра, установленный в корпусе соосно со штоком силового цилиндра, крепе;|(ные элементы, кинематически связанные с рычагами, отличающийся тем, что, с целью расширения технологических возможностей и повышения производительности, он снабжен дополнительным поршнем, расположенньпч соосно с осью схвата, тремя направляющими, установленными на дополнительном
поршне и расподоженными в плоскости, перпендикулярной оси дополнительного поршня, в радиальном направлении, ползунами, взаимодействующими с указанными направляющими и жестко связанными с дополнительными губками, расположенными в-промежутках между губками захвата и имеющими пазы, расположенные параллельно оси схвата, причем в пазах дополнительных губок
расположены дополнительно введенные сухари, имеющие возможность перемещаться вдоль этих пазов и аарнирно связаны с рычагами.
20
21
18
14
Фие.2
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Очувствленный схват промышленного робота | 1988 |
|
SU1593956A1 |
| Схват промышленного робота | 1988 |
|
SU1830344A1 |
| Схват промышленного робота | 2023 |
|
RU2813251C1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Схват промышленного робота | 1981 |
|
SU1014701A1 |
| Схват | 1983 |
|
SU1161376A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Схват промышленного робота | 1987 |
|
SU1498609A1 |
| Схват промышленного робота | 1985 |
|
SU1284831A1 |
Изобретение относится к машиностроению и может быть использовано при роботизированной сборке изделий. Цель изобретения - расширение технологических возможностей и повышение производительности за счет осуществления подачи захваченной детали вдоль оси схвата. Схват содержит корпус, в котором установлены два поршня - основной и дополнительный, рычаги с губками захвата, рычаги с дополнительными губками, установленными между губками захвата. На дополнительном поршне установлены три направляющие, которые расположены в плоскости, перпендикулярной оси схвата, в радиальном направлении. По направляющим перемещаются ползуны, жестко связанные с дополнительными губками. Дополнительные губки имеют пазы, параллельные оси схвата, в которых перемещаются сухари, шарнирно связанные с рычагами. 2 ил.
Редактор И.Шулла
Составитель В,Сергеев Техред Л.Сердюкова
Заказ 6335/17
Тираж 778
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
КорректорО.Ципле
Подписное
| Захватное устройство | 1985 |
|
SU1337251A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
