(54) СХВАТ ПРОМЫШЛЕННОГО РОБОТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Схват промышленного робота | 1980 |
|
SU906688A1 |
| Схват манипулятора | 1983 |
|
SU1071421A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Схват | 1986 |
|
SU1390021A1 |
| Схват промышленного робота | 1981 |
|
SU1014701A1 |
| Схват | 1987 |
|
SU1419881A1 |
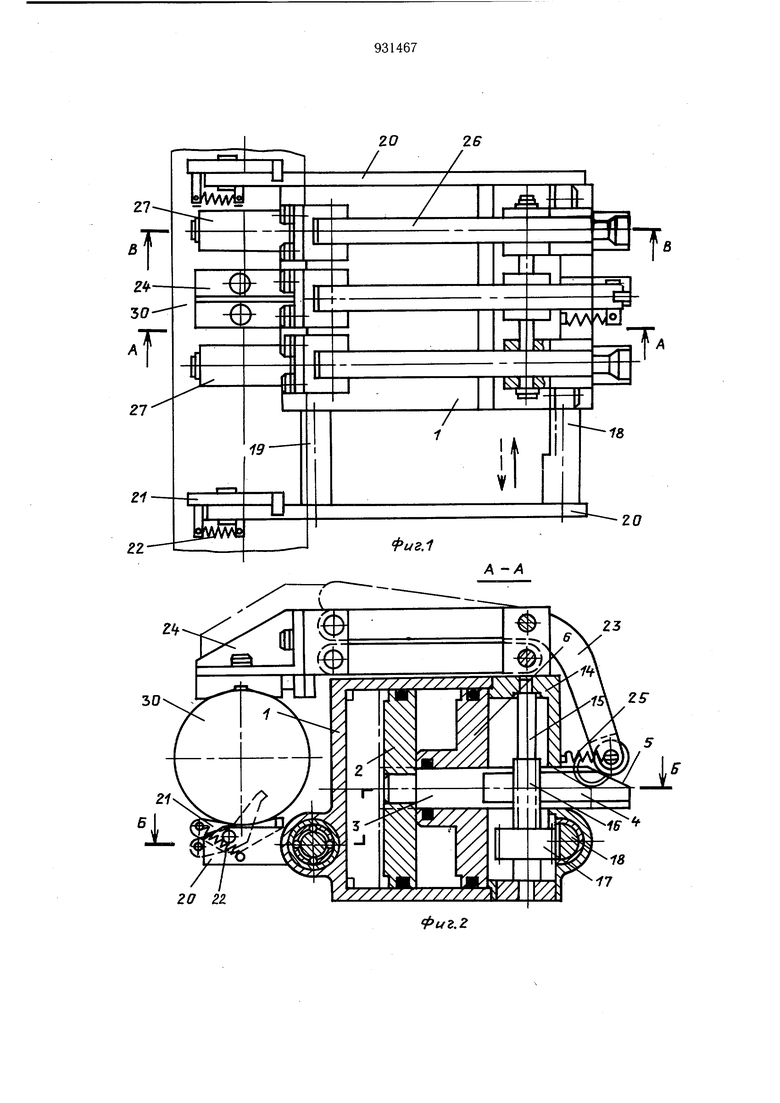

Изобретение относится к захватным устройствам промышленных роботов и -может использоваться в робототехнике. Известен схват промышленного робота, содержащий корпус, с размещенным на нем механизмом зажима, выполненным в виде зажимных рычагов с губками, опорных губок и силового цилиндра с основным поршнем и штоком, связанным с клином 1. Недостатком известного схвата являются его узкие технологические возможности. Цель изобретения - расширение технологических возможностей. Поставленная цель достигается тем, что схват снабжен кронштейнами, дополнительными рычагами с губками, выполненными в виде опор качения, и зубчатой передачей, состоящей из зубчатого колеса и основной и дополнительной зубчатых реек, а силовой цилиндр снабжен дополнительным поршнем с кулачками, причем на штоке силового цилиндра размещена основная зубчатая рейка, а опорные губки и дополнительная зубчатая рейка размещены на кронштейнах, которые размещены на корпусе с возможностью перемещения в направлении, перпендикулярном оси силового цилиндра, при этом кулачки дополнительного поршня кинематически связаны с дополнительными рычагами. На фиг. 1 изображен схват, вид сверху; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 2; на фиг. 4- сечение В-В на фиг. 1. Схват промышленного робота состоит из корпуса 1., внутри которого размещен основной поршень 2 со штоком 3, на котором выполнена дополнительная зубчатая рейка 4 и клиновый скос 5, дополнительный поршень 6, с двумя кулачками 7, на которых имеется лыска 8, скос 9 и лыска 10. На кулачках 7 установлены, пружины 11 сжатия. В корпусе 1 выполняют каналы 12 и 13 для подвода сжатого воздуха и устанавливают крышку 14, в которой смонтирована реечная передача, состоящая из оси 15, на которой установлены зубчатое колесо с зубчатыми венцами 16 и 17, и рейки 18. В корпусе 1 устанавливают направляющую 19 качения. На рейке 18 и направляющей 19 качения установлены кронштейны 20, на которых смонтированы качающиеся самоустанавливающиеся опорные губки 21, связанные с кронщтейнами 20 пружиной 22 растяжения. На крышке 14 установлен рычаг 23, на котором крепится зажимная призматическая губка 24. Рычаг 23 связан с крышкой 14 пружиной 25 растяжения. На крышке 14 установлены два дополнительных рычага 26, на которых крепятся губки 27, выполненные в виде опор качения. С рычагом 26 связан толкатель 28, установленный в крышке 14 и контактирующий с кулачком 7. На толкателе 28 установлена пружина 29. Перемещаемая деталь обозначена на чертеже позицией 30. Схват промышленного робота работает следующим образом. Поступаюший через канал 12 сжатый воздух, удерживает основной поршень 2 и поршень 6 в крайнем правом положении. Пружины 11 при этом находятся в сжатом состоянии. Рейка 18 выдвинута. Деталь 30 лежит на качающихся губках 21 и прижимается к ним губкой 24, получающей усилие зажима от поршня 2 через рычаг 23, контактирующий с клиновым скосом 5 щтока 3. Деталь 30 прижимается к губкам 21 и губками 27, выполненными в виде опор качения, которые получают усилие зажима от поршня 2, передающего усилие на поршень 6, и кулачков 7, через передающий толкатель 28 и рычаг 26. При подаче команды на установку детали 30, например, в патрон станка канал 12 соединяется с атмосферой, а в канал 13 подается давление. Поршень 2 при этом отходит в левое положение, а поршень 6 удерживается на месте. При отходе поршня 2 в левое положение губка 24 пружиной 25 отводится от детали 30 и одновременно движение со щтока 3 через рейку 4, зубчатые венцы 16 и 17 зубчатого колеса передается на рейку 18, которая начинает перемещаться по направлению стрелки, обозначенной на фиг. 1 и 3 сплошной линией. Рейка 18 перемещает в указанном направлении кронштейны 20 и направляющую 19 качения. Поскольку поршень 6 остается в правом положении, то он. продолжает прижимать губки 27 к детали 30 и через нее к губкам 21. В местах контакта губок 27 с деталью 30 возникает трение качения, которое меньше трения скольжения, возникающего в местах контакта губок 21 с деталью 30. Поэтому деталь 30 остается неподвижной относительно кронщтейнов 20 и перемещается вместе с ними относительно вращающихся губок 27. Происходит установка детали в патрон станка. После зажима детали патроном по команде канал 13 сообщается с атмосферой. При этом пружины 11 отводят поршень 6 и кулачки 7 влево, толкатель 28 переходит под действием пружины 29 с лыски 10 через скос 9 на лыску 8, губки 27 отводятся от детали 30. Схват отводится от детали и губки 21 под действием пружины 22 поворачиваются. При съеме детали из патрона ,схват работает следующим образом. Поршни 2 и 6 стоят в левом положении при этом кронштейны 20 перемещены по стрелке, обозначенной сплошной линией. Схват подходит к детали, закрепленной в патроне, при этом губки 21 устанавливаются под деталью. По команде через канал 12 под поршень 2 подается давление и поршень 2 совместно с поршнем 6 начинает перемещаться вправо. Шток 3 своей рейкой 4 через зубчатые венцы 16 и 17 зубчатого колеса перемещает рейку 18 и кронщтейны 20по стрелке, обозначенной пунктирной линией. Толкатель 28 сразу после начала движения начинает подъем по скосу 9, угол подъема которого значительно круче угла подъема скоса 5 на штоке 3, прижимая в ода к движущимся кронштейнам 20 через губки 21 деталь 30. Происходит снятие детали из патрона и в конце хода губки 24 зажимают деталь в схвате, после чего схват выводится из рабочей зоны. Предлагаемый схват промыщленного робота имеет возможность не только зажимать деталь, но и перемещать ее в осевом направлении, что необходимо при загрузке детали в патрон или какое-то технологическое приспособление на станке, что расширяет его технологические возможно и. Формула изобретения Схват промышленного робота, содержащий корпус с размещенным на нем механизмом зажима, выполненным в виде зажимных рычагов с губками, опорных губок и силового цилиндра с поршнем, несущим клин, отличающийся тем, что, с целью расщирения технологических возможностей, он снабжен кронштейнами, дополнительными рычагами с губками, выполненными в виде опор качения, и зубчатой передачей, состоящей из зубчатого колеса и зубчатых реек, а силовой цилиндр снабжен дополни, , тельным поршнем с установленными на нем кулачками, причем на штоке силового цилиндра размещена одна зубчатая рейка, а опорные губки механизма зажима и вторая зубчатая рейка размещены на кронщтейнах. которые установлены на кррпусе с возможностью перемещения в направлении, перпендикулярном оси силового цилиндра, при этом кулачки дополнительного порщня кинематически связаны с дополнительными рычагами. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 527286, кл. В 25 5 15/00, 1975.
yvvwt
27г
в
Е
i
27
19
2-/
th
22
26
//
н
R
WV
;Т
/
18
го
Фиг.1
Фиг, 2
ZO
11
Фиг.Ъ Vb 6 11
