Изобретение относится к измерительной технике и может быть испапь- зовано при измерении различных физических величин в условиях искажающего влияния побочных физ.ических величин (возмущений), вызывающих аддитивную погрешность в выходном сигнале преобразователя основной Аи- дической величины.
Цель изобретения - повьшение помехозащищенности измерения за счет подавления аддитивной помехи, обус- . ловленной влиянием побочной физичес- кой величины на преобразователь из- | меряемой физической величины.
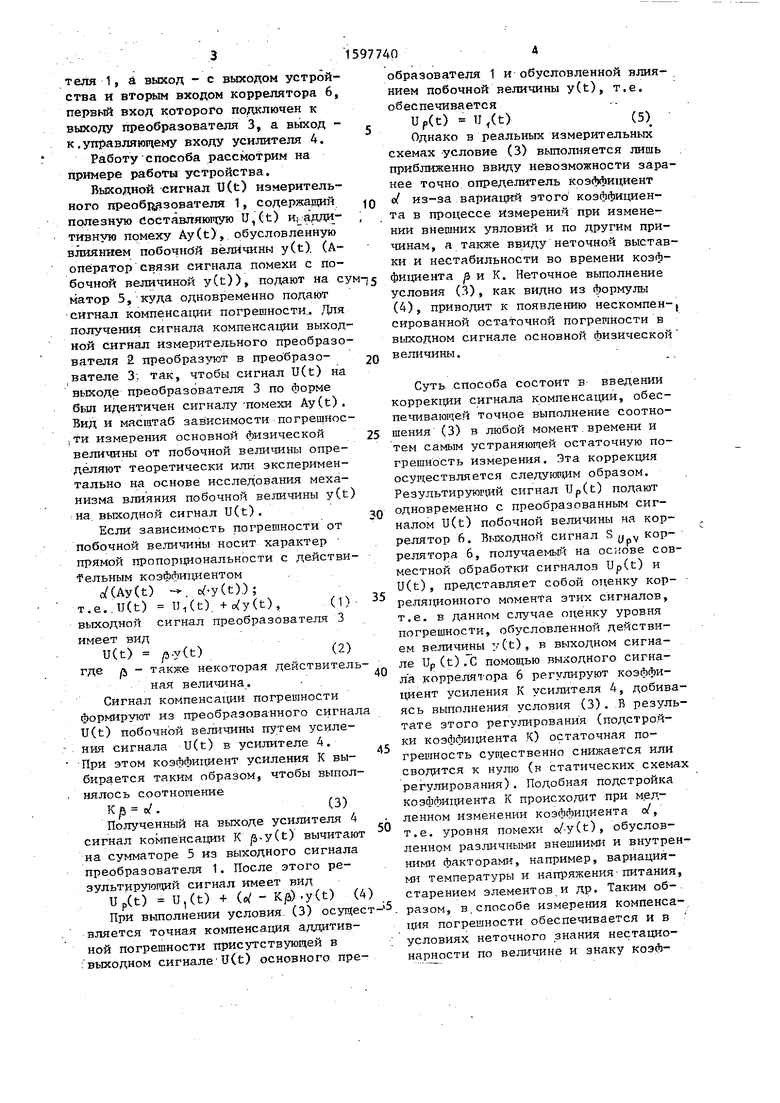
На черте же приведена блок-схема устройства для реализации предлагаемого способа.
Устройство содерм т основной и вспомогательна измерительные преобразователи 1 и 2, входы которых являются входами основной и побочной физических величин соответственно. Выход преобразователя 2 через последовательно соединенные преобразователь 3 сигнала побочной величины и усилитель 4 с регулируемым коэффициентом усиления подключен к второму входу сумматора 5, первый вход которого соединен с выходом преобразоваC7I
ч а
тепл 1, а выход - с выходом устройства и вторым входом коррелятора 6, первый вход которого подключен к выходу преобразователя 3, а вьЬсод - к.управляющему входу усилителя 4.
Работу способа рассмотрим на примере работы устройства.
Выходной сигнал U(t) измерительного преобщгзователя 1, содержащий псщезную йоставляюртую U,(t) И|-,адди- тивную помеху Ay(t), обусловленную влиянием побочнбй величины y(t). (А- опёратор связи сигнала помехи с пообразователя 1 и обусловленной влиянием побочной величины y(t), т.е. обеспечивается
Up(t) U/t)
(5)
10
- р - - т - . -«
Однако в реальных измерительных схемах условие (3) выполняется лишь приближенно ввиду невозможности зара нее точно определитель коэффициент 0 из-за вариаций зтого коэффициента в процессе измерений при изменении внешних унловий и по другим при чинам, а также ввиду неточной выста ки и нестабильности во времени козф
пггёоатоТ) связи сигнала помехи i. ни-
бочкой величиной y(t)), подают на . и К. Неточное выполнение .:.„ „„„о.ло, гттппия (3). как видно из формулы
25
матор 5, куда одновременно подают сигнал компенсахщи погрешности.. ,Тля получения сигнала компенсации выходной сигнал измерительного преобразователя 2 преобразуют в преобразо- 20 вателе 3; так, чтобы сигнал U(t) на выходе преобразователя 3 по форме был идентичен сигналу -помехи Ay{t). Вид и масштаб зависимости погрещнос- ;Ти измерения основной физической величины от побочной величины определяют теоретически или экспериментально на основе исследования механизма влияния побочной величины yCt) на. выходной сигнал U(t),
Если зависимость погрешности от побочной величины носит характер прямой пропорциональности с действительным коэффициентом
/(Ay(t) -.y-y(t).); T.e,.U(t) IliCt). (t), (1) выходной сигнал преобразователя 3 имеет вид
U(t) /5-y(t)(2)
где /5 - также некоторая действительная величина.
Сигнал компенсации погрешности формируют из преобразованного сигнала U(t) побочной величины путем усиления сигнала U(t) в усилителе 4.
При этом коэффициент усиления К выбирается таким образом, чтобы выпол. нялось соотношение
. 3.
Полученный на выходе усилителя сигнал компенсации К p.y(t) вычитают на сумматоре 5 из вькодного сигнала преобразователя 1. После этого ре- зультируюший сигнал имеет вид
Up(t) U.(t) + U - K|j).y(t) (4)
г , f 1
условия (3), как видно из формулы (4), приводит к появлению нескомпен сированной остаточной погрешности в выходном сигнале основной физическо величины.
и в.: u.vu/ «.« -г ;«;
выполнении условия. (3) осущест- . разом
вляется точная компенсация аддитивной погрешности присутствующей в : выходном сигнале-U(t) основного преСуть .способа состоит в введении коррекции сигнала компенсации, обес печивающей точн.ое выполнение соотно шения (3) в любой момент времени и тем самым устраняющей остаточную по грешность измерения. Эта коррекция осуществляется следуюпщм образом. Результируюг;ий сигнал Up(t) подают одновременно с преобразованным сиг- налом U(t) побочной величины на кор релятор 6. Выходной сигнал S у кор релятора 6, получаемьв1 на основе со местной обработки сигналов Up(t) и U(t), представляет собой оценку кор реляционного момента этих сигналов т.е. в данном случае оценку уровня погрешности, обусловленной действи ем величи ны y(t), в выходном сигна ле Up(t).C помощью выходного сигна ла коррелятора 6 регулируют коэффи циент усиления К усилителя 4, доби ясь выполнения условия (3). В резу тате этого регулирования (подстрой ки коэффшщента К) остаточная погрешность существенно снижается ил сводится к нулю (в статических.схе регулирования). Подобная подстройк коэффициента К происходит при медленном изменении коэффициента о1, т.е. уровня помехи o/.y(t), обуслов ленном различными внешними и внутр ними факторами, например, вариация ми температуры и напряжения-питани старением элементов.и др. Таким об разом, в способе измерения компенс ция погрешности обеспечивается и в условиях неточного знания нестацио нарности по величине и знаку козф
35
40
45
50
образователя 1 и обусловленной влия. нием побочной величины y(t), т.е. обеспечивается
Up(t) U/t)
(5)
0
- р - - т - . -«
Однако в реальных измерительных схемах условие (3) выполняется лишь приближенно ввиду невозможности заранее точно определитель коэффициент 0 из-за вариаций зтого коэффициента в процессе измерений при изменении внешних унловий и по другим причинам, а также ввиду неточной выставки и нестабильности во времени козф
з . и К. Неточное выполнение гттппия (3). как видно из формулы
. и К. Неточное выполнение гттппия (3). как видно из формулы
условия (3), как видно из формулы (4), приводит к появлению нескомпен-, сированной остаточной погрешности в выходном сигнале основной физической величины. .5
0
;«;
- . разом
Суть .способа состоит в введении коррекции сигнала компенсации, обеспечивающей точн.ое выполнение соотношения (3) в любой момент времени и тем самым устраняющей остаточную погрешность измерения. Эта коррекция осуществляется следуюпщм образом. Результируюг;ий сигнал Up(t) подают одновременно с преобразованным сиг- налом U(t) побочной величины на коррелятор 6. Выходной сигнал S у коррелятора 6, получаемьв1 на основе совместной обработки сигналов Up(t) и U(t), представляет собой оценку корреляционного момента этих сигналов, т.е. в данном случае оценку уровня погрешности, обусловленной действием величи ны y(t), в выходном сигнале Up(t).C помощью выходного сигнала коррелятора 6 регулируют коэффициент усиления К усилителя 4, добиваясь выполнения условия (3). В результате этого регулирования (подстройки коэффшщента К) остаточная погрешность существенно снижается или сводится к нулю (в статических.схемах регулирования). Подобная подстройка коэффициента К происходит при медленном изменении коэффициента о1, т.е. уровня помехи o/.y(t), обусловленном различными внешними и внутренними факторами, например, вариациями температуры и напряжения-питания, старением элементов.и др. Таким об-- разом, в способе измерения компенсация погрешности обеспечивается и в условиях неточного знания нестацио- нарности по величине и знаку козф35
40
45
50
ициента rf связи помехи с вызываюей ее побочной величиной y(t).
Способ рассмотрен на примере про- стейией пропортдиональной зависимости погрешности измерения от одной побочной неличины. При наличии нескольких побочных величин и более сложных зависимостях погрешности от этих побочных величин аналогичная схема компенсатщи погрешности строится для каждой из них с применением необходимого вида преобразования A.y(t) (пропорциональной зависимости, дифференцирования, интегрирования, возведения в степень и т.д.) и установлением соответствующего масштабного коэффиидента К..
Формула изобретения
Способ измерения физических величин, заключающийся в том, что одновременно преобразуют основную физи)
597740
10
ческую величину и побочную физическую величину, формируют из преобразованной побочной физической величины сигнал компенсации, получают результирующий сигнал путем суммирования сигнала преобразованной ; основной физической величины сигналом компенсации, функционально преобразуют результи- руюгдий сигнал и сигнал преобразова Н- ной побочной физической величины, измеряют результирующий сигнал, о т- л и ч а ю щ и и с я тем, что, с целью повьпаения помехозащищенности, перед суммированием с сигналом преобразованной основной физической величины сигнал компенсации усиливают с ко- зффициентом усиления,зависящим от результата функ1р1онального преобразо20 вания, которое производят путем определения корреляционного момента результирующего сигнала и сигнала преобразованной побочной Лизической величины. 25
15

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКЦИИ СИСТЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ С ПАРАМЕТРИЧЕСКИМ ДАТЧИКОМ | 1998 |
|
RU2130620C1 |
| Устройство измерения перемещений | 1990 |
|
SU1779906A1 |
| СПОСОБ КОРРЕКЦИИ СИСТЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ С ПАРАМЕТРИЧЕСКИМ ДАТЧИКОМ | 1998 |
|
RU2134424C1 |
| Устройство для контроля процесса нанесения покрытий | 1989 |
|
SU1682783A1 |
| Устройство для измерения массы | 1986 |
|
SU1435949A1 |
| Многоканальное адаптивное приемное устройство | 1981 |
|
SU995681A1 |
| Способ определения сдвига фаз | 1990 |
|
SU1708766A1 |
| Устройство для уравновешивающего преобразования физических величин и их измерения | 1977 |
|
SU763801A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ФАЗОВОЙ КОМПЕНСАЦИИ В СИСТЕМЕ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1998 |
|
RU2211469C2 |
| Устройство для измерения временных интервалов | 1989 |
|
SU1674030A1 |
Изобретение относится к измерительной технике. Цель изобретения - повышение помехозащищенности измерения. Способ заключается в том, что одновременно преобразуют основную физическую величину и побочную физическую величину, формируют из преобразованной побочной физической величины сигнал компенсации, получают результирующий сигнал путем суммирования преобразованной основной физической величины с сигналом компенсации, функционально преобразуют результирующий сигнал и преобразованную побочную физическую величину, измеряют результирующий сигнал. Усиление сигнала компенсации с коэффициентом усиления, зависящим от результата функционального преобразования, которое производят путем определения корреляционного момента функционально преобразуемых сигналов, обеспечивает подавление аддитивной помехи, обусловленной влиянием побочной физической величины на преобразователь основной физической величины. 1 ил.
X(t)
a(.t)Uii(i)(y(t)
y(t)
Up(i}
(i)
w
j((i)
| Земельман М.А | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| М., Изд-во стандартов, 1972, с | |||
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
| Петров Б.Н | |||
| и.др | |||
| Принцип инвариантности в измерительной технике | |||
| М.: Наука, 1976, с | |||
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| ФИЗИЧЕСКИХ ВЕЛИЧИН | |||
