(21)4239208/31-08
(22)30.04о87
(46) 30.11„90. Бюл. № 44
(71)Белорусский политехнический институт
(72)И.П. Филонов, А.М, Чирков и А.Ао Епифанов
(53)621.923.5(088.8)
(56)Авторское свидетельство СССР
№ 1530415, 1530414,кл. В 24 В 13/02,1986.
(54)СТАНОК ДЛЯ РОТОРНОЙ ДВУСТОРОННЕЙ ОБРАБОТКИ СФЕРИЧЕСКИХ НЕКОНЦЕНТРИЧЕСКИХ ПОВЕРХНОСТЕЙ ОПТИЧЕСКИХ ДЕ(57)Изобретение относится к механической обработке сферических поверхностей оптических деталей и может
86.
42 43
быть использовано в приборостроении при изготовлении оптических линз Цель изобретения - повышение производительности обработки оптических деталей с радиусом наружной сферической поверхности, меньшим радиуса внутренней сферической поверхноси Станок для роторной двусторонней обработки сферических неконцентрических поверхностей содержит инструментальные шпиндели 34 и 40 с осями 00 и о о их вращения, предназначенные для обработки соответственно внутренней и наружной поверхностей, и два транспортиру- №(их элемента, вьтолненных в виде барабанов -10 и 11. Барабан 11 установлен в барабане 10 со смещением.
i
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для роторной двусторонней обработки сферических неконцентрических поверхностей оптических деталей | 1987 |
|
SU1609618A1 |
| Станок для двусторонней обработки оптических деталей с криволинейными поверхностями | 1985 |
|
SU1346399A1 |
| Устройство для двусторонней обработки оптических деталей с криволинейными поверхностями | 1983 |
|
SU1140936A1 |
| Устройство для обработки асферических поверхностей точением | 1990 |
|
SU1759563A1 |
| Устройство для двусторонней обработки оптических деталей с криволинейными поверхностями | 1981 |
|
SU994220A1 |
| Способ шлифования тороидальных поверхностей | 1980 |
|
SU973315A1 |
| Устройство для двусторонней обработки оптических деталей с криволинейными поверхностями | 1982 |
|
SU1060431A1 |
| Способ обработки резанием трохоидальных поверхностей и устройство для его осуществления | 1980 |
|
SU897405A1 |
| Способ обработки деталей типа коленчатых валов и станок для его осуществления | 1986 |
|
SU1421473A1 |
| Станок для роторной двухсторонней обработки сферических поверхностей оптических деталей с неконцентрическими поверхностями | 1987 |
|
SU1659188A1 |
Изобретение относится к механической обработке сферических поверхностей оптических деталей и может быть использовано в приборостроении при изготовлении оптических линз. Цель изобретения - повышение производительности обработки оптических деталей с радиусом наружной сферической поверхности, меньшим радиуса внутренней сферической поверхности. Станок для роторной двусторонней обработки сферических неконцентрических поверхностей содержит инструментальные шпиндели 34 и 40 с осями OO и OЪOЪ их вращения, предназначенными для обработки соответственно внутренней и наружной поверхностей, и два транспортирующих элемента, выполненных в виде барабанов 10 и 11. Барабан 11 установлен в барабане 10 со смещением. Оси QQ и OЪOЪ вращения барабанов выполнены скрещивающимися. Ось OO вращения шпинделя 40 перпендикулярна оси QQ вращения барабана 11. Оси OO и QQ пересекаются в точке, расположенной в горизонтальной плоскости симметрии барабана 11. Ось OЪOЪ вращения шпинделя 34 перпендикулярна оси QЪQЪ вращения барабана 10. Оси OЪOЪ и QЪQЪ пересекаются в точке расположенной в горизонтальной плоскости симметрии барабана 10. Оси OO и OЪOЪ шпинделей 34 и 40 перпендикулярны, расположены в плоскости, проходящей через точки пересечения соответственно осей OO и QQ и осей OЪOЪ и QЪQЪ, и пересекаются в точке пересечения оси OO и оси QQ. 6 ил.
St/l А
С5
СО
оь
со
ш
36
JS
Оси QQ и Q Q вращения барабанов выполнены скрепщвающимися. Ось 00 вращения шпинделя 40 перпендикулярна оси QQ вращения барабана 11„ Оси 00 и QQ пересекаются в точке, расположенной в горизонтальной плоскости симметрии барабана. 11, Ось О .О вращения шпинделя 34 перпендикулярна оси Q Q вращения барабана Ю Оси
Изобретение относится к механичес кой обработке сферических поверхностей оптических деталей и может быть использовано в приборостроении при изготовлении оптических, линз
Целью изобретения являет ся повышение производительности обработки оптических деталей с радиусом наружной сферической поверхностиj меньшим радиуса внутренней сферической поверхности.
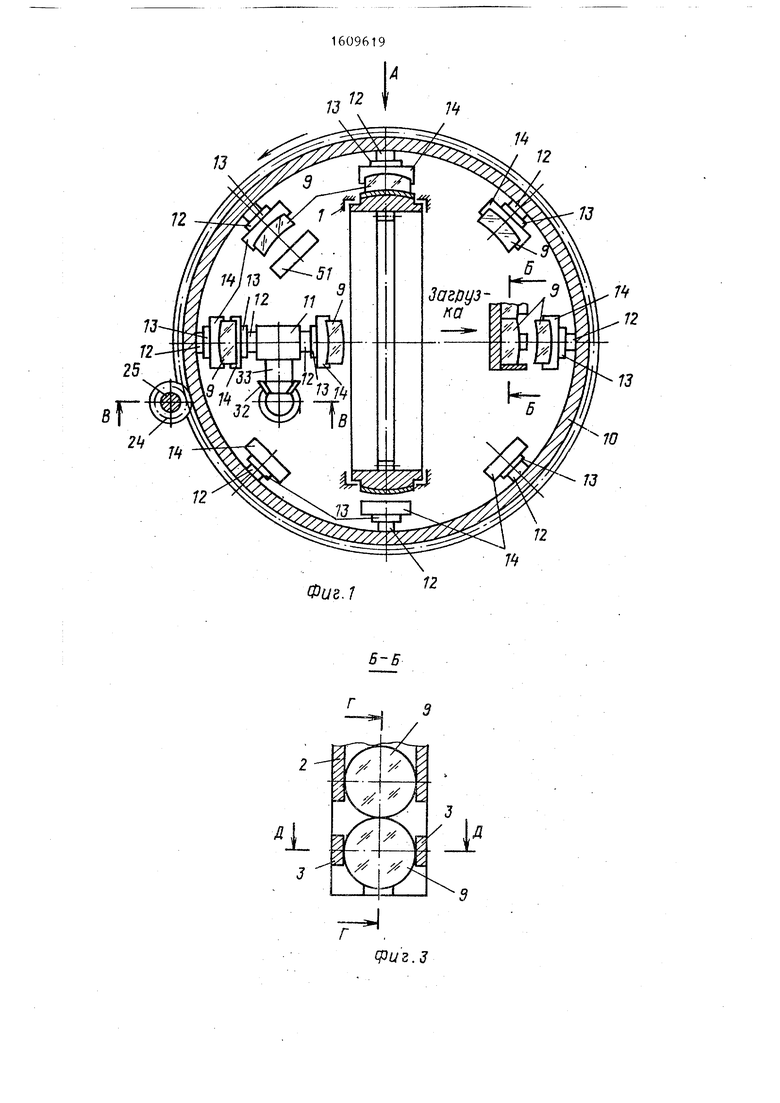
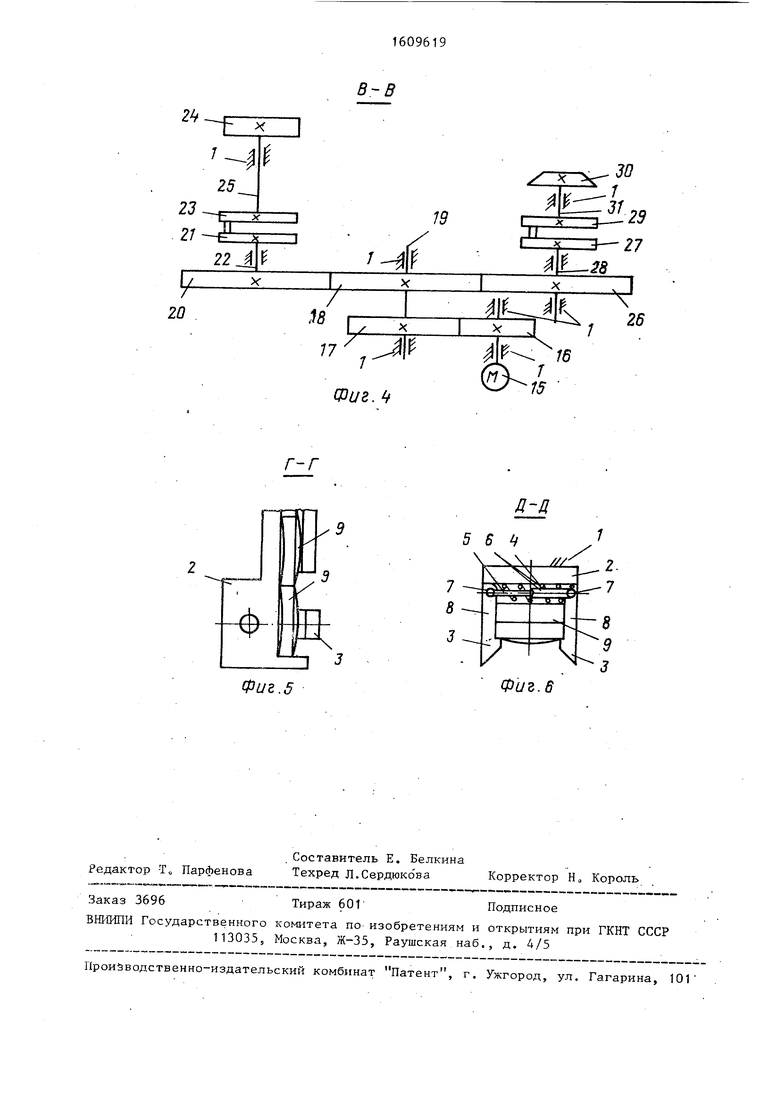
На фиг, 1 представлено предлагаемое устройство, продольный разрез в плоскости, перпендикулярной оси симметрии, транспортирующего устройства, несущего деталь для обработки внутренней сферической поверхности; на фиг. 2 - вид А на фиг. 1; на фиг,. 3 - разрез Б-Б на фиг, 1; на фиг. 4 - разрез В-В на фиг, t; на фиг„ 5 - разрез на фиг, 3; на фиг, 6 - разрез Д-Д на фиг. 3.
Станок содержит основание 1, загрузочное устройство 2, состоящее из фийсируюпщх губок 3, пружины 4, пальца 5, трубки 6, штифтов 7 и 8, в которое подаются обрабатываемые детали 9, транспортирутащие элементы, выполненные в виде барабанов 10 и 11, в которых закреплены втулки 12 и 13, фиксир-ующие устройства 14. Барабан 10 вращается от приводного электродвигат етя 15 с. шестерней 16 через шестерни 17 и 18, жестко сидящие на валу 19, шестерню 20 и входное звено мальтийского механизма 21 которые жестко сидят на вапу 22, выходное звено мальтийского механизма 23, шестерню 24, которые жестко сидят на валу 25, Барабан 11 вращается от приводного электродвигателя 15 с шестерней i6 через шестерни 17 и 18, которые жестко сидят на валу 19, шестерню 26 и входное звено
,0 о и Q Q пересек:гются в точке, расположенной в горизонтальной плоскости симметрии барабана 10, Оси 00 5 и о О шпинделей 34 и.40 перпендикулярны, расположены в плоскости, про- ходя1 |ей через точки пересечения соответственно осей 00 и QQ и осей J О О и Q Q 5 и пересекаются в точке 10 пересечения оси 00 и оси QQ. 6 ил.
мальтийского механизма 27, которые жестко сидят на валу 28, выходное звено мальтийского механизма 29, ко- ническую шестерню 30, которые жест0 ко сидят на валу 31., коническую шестерню 32, жестко сидящую на валу 33, Станок также содержит инструментальный шпиндель 34, вращающийся от приводного электродвигателя 35 с шестер5 ней 36, через шестерни 37 и 38, жестко сидящие на валу 39, и предназначенный для обработки внутренней поверхности детали инструментальный шпиндель 40 вращающийся от шпинде0 ля со встроенным электродвигателем 41, имеющего возможность осевого перемещения от приводного электродвигателя 42, через редуктор 43, винт 44, гайку 45 и предназначенный для об- оаботки наружной поверхности детали,
1
Ось . 00 инструментального шпинделя 40 перпендикулярна оси вращения QQ барабана 11, Точка перёсеQ чения осей 00 и QQ расположена в горизонтальной плоскости симметрии барабана 11, Ось вращения О 0 инструментального шпинделя 34,. перпендикулярна оси врап5ения Q Q барабана 10,
5 Точка пересечения осей О о и Q Q расположена в горизонтальной плоскости симметрии барабана 10. Барабаны 10 и 11 установлены так, что барабан 10 охватывает барабан 11 со смещением, при этом оси вращения барабанов QQ и Q Q выполнены скре1щ вающимися. Инструментальные шпршделк 34 и 40 установлены так, что оси их 00 и о о перпендикулярны, расположены в плоскости, проходящей через точки пересечения осей вращения 00 и о о инструментальных шпинделей с осями вращения QQ и Q Q барабанов 10 и 11 и пересе- кшотся в точке пересечения оси воаше0
;1609619
ния об инструментального шпинделя 40
и оси вращения барабана 11„
Станок работает следующим образом. Обрабатываемые детали 9 устанавливают в отверстие загрузочного устройства 2 (фиг. 4 и 5). В отверстие . втулки 12 от сети подается рабочая среда. Под действием рабочей среды втулка 13 перемещается в осевом направлении до тех пор пока фиксирующее устройство 14 не разожмет в радиальном направлении фиксирующие губки 3 и не упрется в загрузочное устройство 2о В полости устройства 14 создается разряжение Этим самым деталь закрепляется в фиксирующем устройстве 14. Затем рабочая среда удаляется из втулки 12о Под действием пружины втулка 13 возвращается в исходное положение, при этом под действием собственного веса следующая деталь подается на место взятой и зажимается фиксирующими губками 3. Включают электродвигатель 15 привода вращения барабанов 10 и 11 электродвигатель 35 привода вращения инструментального 1чпинделя 34.
Барабан 10 переметцается на одну восьмую часть окружности и останавливается посредством мальтийского механизма (21,, 23) для захвата следующей детали о После захвата детали 9 барабан tO под действием мальтийско- .го механизма (21, 23) перемещается еще на одну восьмую часть, и деталь 9 входит в зону обработки инструментального щпинделя 34, Дальнейшее перемещение барабана 10 происходит аналогичным образом. При повороте барабана 10 на 180° происходит перехват детали 9 фиксирующим устройством 14 барабана 11„ При этом через отверстие втулки 12 барабана 11 поВключают встроенный тель 41 привода вращени тального шпинделя 40„ П ма.пьгийского механизма исходит поворот барабан в зону обработку инстру шпинделем 40. Барабан вается. При этом происх 10 следующей детали 9. Дал барабана 11 происходит и при повороте на 270° вакуум из полости фикси ройства 14.
15 Формула изоб
Станок для роторной обработки сферических н ческ1сс поверхностей опт лей, содержащей инстр тч 20 шпиндели для обработки
и наружной поверхностей тирующих элемента, перв выполнен в виде барабан ния которого перпендику 25 вращения инстр тчентальн , для обработки наружных а точка пересечения этш ложена в горизонтальной симметрии барабана, от 30 Щ и и с я тем, что, с д ния производительности о ческих деталей с радиусо сферической поверхности радиуса внутренней сфери ности, второй транспорти мент выполнен в виде бар вающего первый барабан, вращения барабанов скреп ось вращения инструмента Q деля для обработки внз тр ческой поверхности перпе оси вращения второго бар этом точка пересечения о жена в горизонтальной пл
дается рабочая среда, и втулка 13 пе- метрии второго барабана.
ремещается до упора в обрабатываемую деталь 9. Из полости фиксирующего устройства 14 барабана 10 снимается вакуум, а в полости фиксирующего устройства 14 барабана 11 создается разряжение, и происходит перехват детали 9 о При этом через отверстие втулки 12 рабочая среда удаляется и под действием пружины втулки 13 возврашается в исходное положение.
50
55
щения инстру гентальных ш перпендикулярны друг .дру жены в плоскости, проход точки пересечения осей вр стр; тчентальных шпинделей щения барабанов, и пересе ке пересечения оси вращен ментального шпинделя для наружных поверхностей и о первого барабана.
Включают встроенный электродвигатель 41 привода вращения инструментального шпинделя 40„ Под действием ма.пьгийского механизма (27,29) про исходит поворот барабана 11 на 90° в зону обработку инстру гентальным шпинделем 40. Барабан 11 останавливается. При этом происходит перехват 10 следующей детали 9. Далее вращение барабана 11 происходит аналогично и при повороте на 270° снимается вакуум из полости фиксирующего устройства 14.
15 Формула изобрет е н и я
Станок для роторной двусторонней обработки сферических неконцентри- ческ1сс поверхностей оптических деталей, содержащей инстр тчентальные 0 шпиндели для обработки внутренней
и наружной поверхностей и два транспор-. тирующих элемента, первый из которых выполнен в виде барабана, ось вращения которого перпендикулярна оси 5 вращения инстр тчентального шпинделя , для обработки наружных поверхностей, а точка пересечения этшс осей расположена в горизонтальной плоскости симметрии барабана, отличаю- 0 Щ и и с я тем, что, с делью повьшзе- ния производительности обработки оптических деталей с радиусом сферической поверхности, меньшим радиуса внутренней сферической поверх- ности, второй транспортирующий элемент выполнен в виде барабана, охватывающего первый барабан, причем оси вращения барабанов скрепщваются, а ось вращения инструментального шпин- Q деля для обработки внз тренней сферической поверхности перпендикулярна оси вращения второго барабана, при этом точка пересечения осей расположена в горизонтальной плоскости симметрии второго барабана.
метрии второго барабана.
а оси вра
щения инстру гентальных шпинделей перпендикулярны друг .другу, расположены в плоскости, проходящей через точки пересечения осей вращения ин- стр; тчентальных шпинделей и осей вращения барабанов, и пересекаются в точке пересечения оси вращения инструментального шпинделя для обработки наружных поверхностей и оси вращения первого барабана.
/J
72
72
ФигЛ
74
72
7J
7J
7J
иг.З
Фиг. 5
д-д
Фиг.6
