Изобретение относится к станкостроению и может быть использовано при получении оптических поверхностей на материалах, поддающихся сверхточной обработке резанием.
Известно устройство для обработки сферических поверхностей, содержащее поворотный стол, платформу для закрепления детали, шпиндель с закрепленным на нем режущим инструментом, выполненный с возможностью наклона в плоскости, проходящей через ось вращения шпинделя и поворота стола. При этом платформа для закрепления детали расположена вне оси поворота стола и выполнена с возможностью наклона в плоскости, проходящей через эту ось (см. а.с. № 659288 СССР в БИ Ms 16 за 1979г.).
Недостатком устройства является отсутствие возможности изготовления асферических поверхностей.
Наиболее близким по своей технической сущности к предлагаемому изобретению является устройство для осуществления способа токарной обработки асферических поверхностей, содержащее станину с шппндепег. для закрепленной детали и инструментальным шпинделем с резцедержателем, установленным под углом к оси шпинделя для закрепления детали. При этом инструментальный шпиндель снабжен исполнительным механизмом, один конг-и которого соединен с резцедержателем, другой закреплен на инструментально шпинделе с возможностью поворота для ориентации резцедержателя вдоль оси шпинделя для закрепления детали (см. а с. № 1103947 БИ Kb 27 за 1984 г.).
Недостатком устройства является то, что по мере приближения резца от периферии к центру меняются углы регэния и
ел
рость. что неблагоприятно сказывается на качестве обработанной поверхности. Хромо того, невозможно получение поверхч ктей, имеющих отличные от окружности сечения (например. эллипсы), в плоскостях, перпендикулярных оси вращения рабочего шпинделя.
Цель изобретения - повышение качества поверхностного слоя обработанной поверхности за счет обеспечения рисок от резца в виде эквидистантных линий.
Для этого в устройстве для обработки асферических поверхностен точением, содержащем станину со шпинделем для закрепления детали и инструментальным шпинделем с резцедержателем, установленным под углом к оси рабочего шпинделя и исполнительным механизмом, один конец которого соединен с резцедержателем, а другой закреплен на инструментальном шпиндепе с возможностью поворота для ориентации резцедержателя вдоль оси рабочего шпинделя, инструментальный шпиндель установлен на станине с возможностью вращения в плоскости, проходящей через ось зафиксированного рабочего шпинделя относительно центра, являющегося точкой пересечения осей зафиксированного рабочего и инструментального шпинделей.
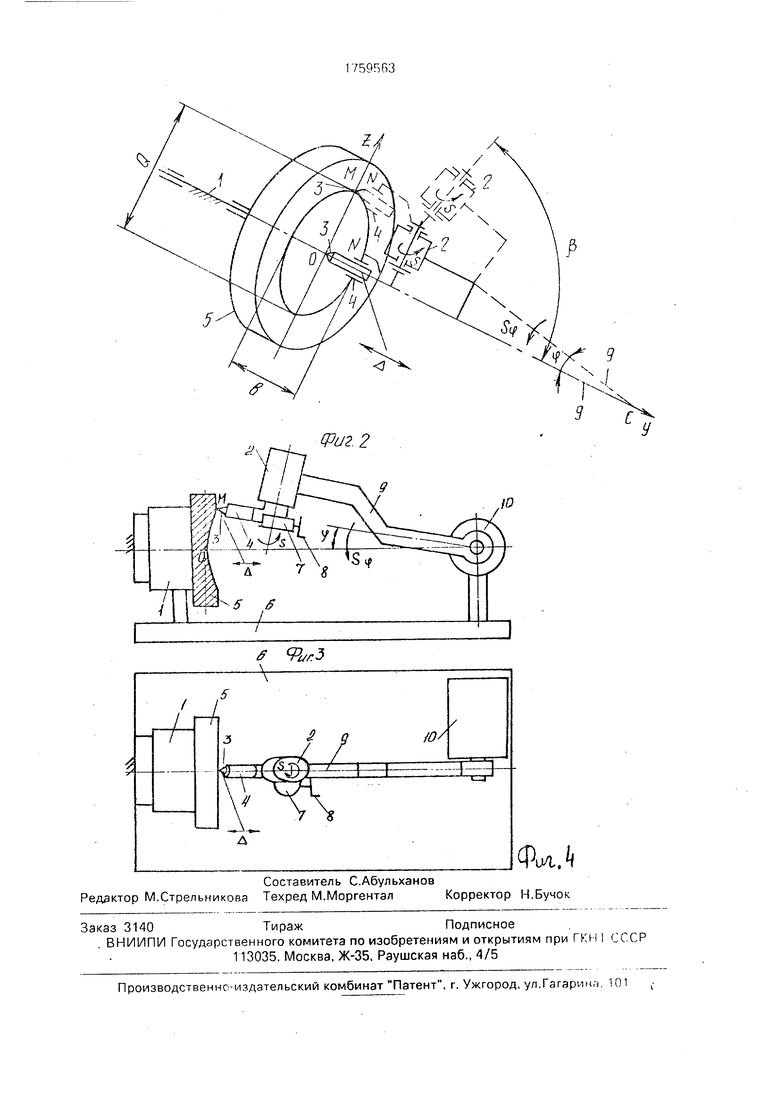
На фиг. 1 изображена схема обработки асферических поверхностей в плоскости, проходящей через оси рабочего и инструментального шпинделей; на фиг. 2 - то же, в пространственной системе координат; на фиг. 3 - устройство для обработки асферических поверхностей; на фиг. 4 - то, же, вид сверху.
На фиг. 1-3 горизонтальная стрелка с обозначением А соответствует поступательному перемещению режущего инструмента; круговая стрелка с обозначением S - направлению круговой подачи инструментального шпинделя величиной S; круговая стрелка с обозначением S р - направлению круговой подачи инструментального шпинделя относительно центра, являющегося точкой пересечения осей рабочего и инструментального шпинделя величиной
Устройство (фиг. 3) состоит из рабочего шпинделя 1, инструментального шпинделя 2, режущего инструмента 3, резцедержателя 4, обрабатываемой детали 5, станины станка 6, исполнительного механизма 7, ручного привода 8, привода поворота 9 и штанги 10.
При этом на станине 6размещены рабочий шпиндель 1 с укрепленной деталью 5,
0
5
0
5
0
привод поворота 9, ось которого соединена со штангой 10. На окончании штанги 10 со- осно с ней укреплен инструментальный шпиндель 2. Последний имеет резцедержатель 4 с режущим инструментом 3. исполнительный механизм 7, ручной привод 8. Кроме того, в корпусе исполнительного механизма 7 установлен двигатель малых перемещений (не показан), например пьезоэлектрический, который соединен с размещенным в направляющей исполнительного механизма 7 резцедержателем 4 для закрепления режущего инструмента 3, а исполнительный механизм 7 имеет возможность изменения величины параметра R,,3a счет поворота его от привода 8. При этом привод поворота 9 обеспечивает поворот инструментального шпинделя 2 так, чтобы поворот проходил в плоскости, проходящей через оси рабочего 1 и инструментального шпинделей. При этом ось г оаи.-ения должна находиться нз оси рабочего шпинделя 1.
Для обработки точением асферических поверхностей, симметричных относительно оси у, а именно параболлоидов вращения, необходимо, чтобы оси шпинделя для закрепления детали 5 и инструментального шпинделя располагались в одной плоскости м устанавливались по отношению друг к другу перед началом обработки на расчетный угол р, который определяется величиной радиуса Ra окружности, формируемой на обрабатываемой поверхности детали 5
35
(р - arctg arcsiri
Ra
где R. длина отрезка от точки А до точки N; R - радиус формируемой на обрабатываемой поверхности окружности; R - длина отрезка от точки С до точки А. Кроме того, наибольшая глубина h асферической поверхности от торца детали должна быть в следующем соотношении с R, R, R
h R i+R2- + R|.
Режущий инструмент 3 с резцедержателем 4 установлен на инструментальном шпинделе 2 таким образом, что направление его поступательного перемещения параллельно оси инструментального шпинделя 2, При этом резцедержатель 4 вместе с режущим инструментом 3 совершает вращение S в плоскости, перпендикулярной оси инструментального шпинделя 2. Инструментальный шпиндель 2 совершает вращательное движение Sy в плоскости.
проходящей через собственную ось и ось рабочего шпинделя 1, а центром вращения является точка С, лежащая н оси рабочего шпинделя 1. Рабочий шпиндель 1 с деталью 5 не совершает никаких движений. Режуще- му инструменту 3 сообщают согласованное с круговыми подачами S и 3 т поступательное перемещение Д.
Устройство оаботает следующим образом.
Рабочий шпиндель 1 фиксируют и закрепляют на нем деталь 5. Шлангу 10 устанавливают на расчетный начальный угол р. На резцедержателе 4 устанавливают режущий инструмент 3 и приводом 8 нзстрэива- ют на инструментальном шпинделе 2 исполнительный еханудм 7. После указанных настроек инструментальному шпинделю 2 сообщают круговую подачу S, а штанге 10 сообщают круговую подачу S т , Согла-
сованное с подачами S и S / поступательное перемещение Д сообщаю резиу 3. Поспе того как резец 3 выйдет из контакта с деталью 5, работа устройства заканчивает- ся.
Величины круговых подач S и S режущего инструмента 3 определяют исходя из расчетных режимов оезэния, а поступательное перемещение режущего инстру- ментз 3 Д находят из параметров асферической поверхности.
Например, для обработки параболлои- да вращения, имеющего в сечениях плоскости, проходящие через ось у параболы Z ау, определяют перемещение Д , как функцию от круговых подач S и S p , равную
отклонению между сферической поверхностью, по которой движется резец 3, от асферической на конической поверхности, центром которой является точка С, а траектория движения резца лежит на образую- 1.цих этой конической поверхности, центр которой вращается в плоскости пересечения осей рабочего 1 и инструментального 2 шпинделей.
В выбранной на фиг. 1-2 системе координат параболоид вращения выражается
следующим уравнением
1 и инструментального 2 шпинделей. В этом случае описанная поверхность имеет следующую аналитическую запись
-( R -i-R;JH-h))2
ft
u
2 у sin S ф l ,
(2)
Линия пересечения поверхностей (1) и (2) даст траекторию, которую должен описывать резец, совершая поступательное и вращательное движение, тогда
х2 72 i+fr-2(y-h)( R2 + R&-h) COSS«,
+
Ж R
+ 2 у sin Sy,: 0
(3)
Если положить, что резец 3 не совершает поступательного перемещения, а его вершина находится в центре резцедержателя 4, т.е. в точке N, тогда 2 находится на поверхности, описываемой уравнением
х2 + у - i R2 + h2 + z2 { v R2 + h2; .
W
При этом считается, что точка М совпадает с центром резцедержателя 4, г.е. точкой N, в момент. когда ось инструментального шпинделя 2 находится в крайнем верхнем или нижнем положении (см. фиг. 1-2).
Линия пересечения поверхностей (2) и (4) даст траекторию, которую должен описывать резец 3 при отсутствии перемещения / а именно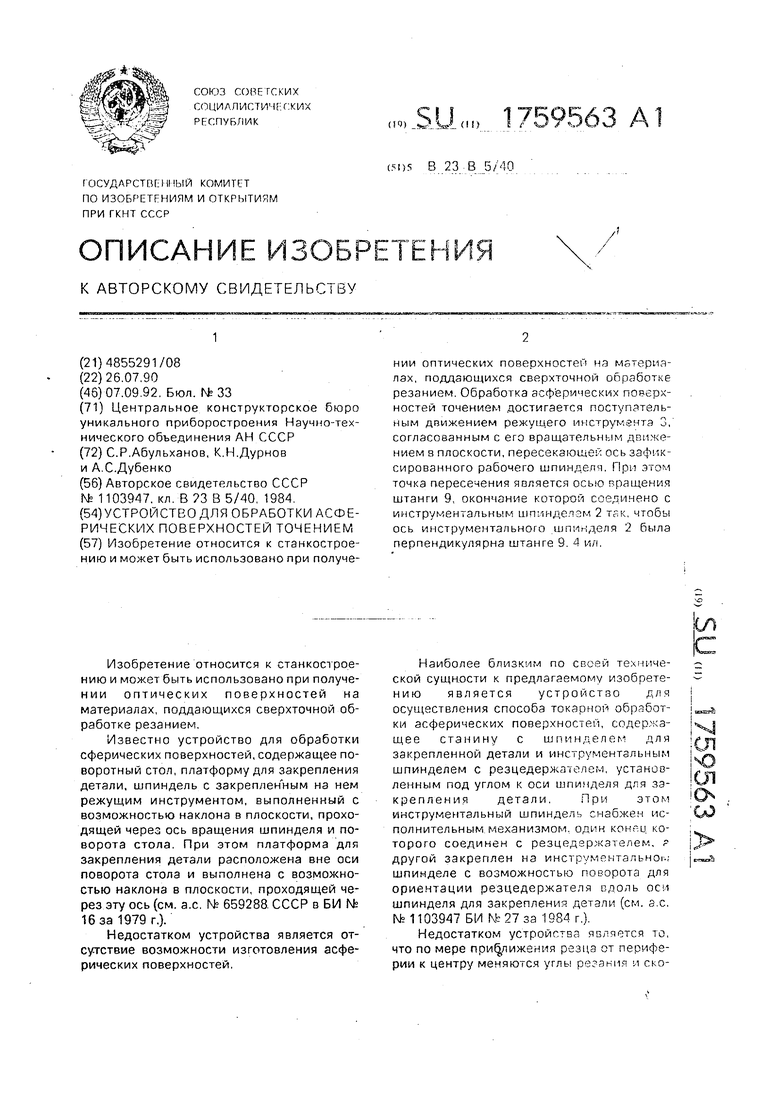



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обработки асферических поверхностей точением | 1990 |
|
SU1759564A1 |
| Способ обработки асферических поверхностей резанием и устройство для его осуществления | 1991 |
|
SU1816532A1 |
| Способ токарной обработки асферических поверхностей и устройство для его осуществления | 1983 |
|
SU1103947A1 |
| Способ обработки асферических поверхностей резанием и устройство для его осуществления | 1991 |
|
SU1816531A1 |
| Способ токарной обработки выпуклых (вогнутых) торцовых поверхностей | 1974 |
|
SU526448A1 |
| Способ управления процессом механической обработки | 1985 |
|
SU1399071A1 |
| Устройство для обработки криволинейных поверхностей | 1981 |
|
SU984693A1 |
| Способ обработки резанием трохоидальных поверхностей и устройство для его осуществления | 1980 |
|
SU897405A1 |
| Способ обработки асферических поверхностей вращения | 1979 |
|
SU874261A2 |
| Способ механической обработки асферических поверхностей вращения | 1985 |
|
SU1304987A1 |
Изобретение относится к станкостроению и может быть использовано при получении оптических поверхностей ча материалах, поддающихся сверхточной обработке резанием. Обработка асферических поверхностей точением достигается поступательным движением режущего инструмента 3, согласованным с его вращательным движением в плоскости, пересекающей ось зафиксированного рабочего шпиндепч. При этом точка пересечения является осью вращения штанги 9, окончание которой соединено с инструментальным шппнде эм 2 тгж, чтобы ось инструментального шпинделя 2 была перпендикулярна штанге 9. J ил.
f +|r 2(y-h).
О)
Резец 3 совершает движение по окруж- ности, которая перпендикулярна направляющим конуса, у которого центром является точка С. При этом ось симметрии этого конуса совершает вращательное движение со скоростью 5 (р в плоскости осей рабочего
x2 + (y-/R|L-bR2+h)2
-( /4 + R2 +h)2 fr-Cx +RJl+ cosSpt)2
lu
+
+
Величина перемещения есть отрезок, отсекаемый кривыми (3) и (5) от луча, являющегося образующей конуса с центром и вращающимся относительно этого центра в плоскости осей рабочего 1 и инструментального 2 шпинделей. Kpoi/ie того, оассмато л- ваемый луч перемещается по образующим конуса с круговой подачей S. Такой луч име- ei следующую аналитическую запись
х у - h +
sin St
cos
рг
cos S t
Пересечение прямой (6) с (5) и (3) даст две точки, расстояние между которыми равно необходимому перемещению Дрезиа 3 для конкретных величин углов поворота оси инструментального шпинделя 7 / штанги 9, При этом во внимание должны быть приняты только те точки, у которых гр h .
Аналогично рассчитывается Л и для других видов поверхностей, образующих асферические поверхности. В этом случае оледы после pesip образуют на обработан ной поверхностиЪлизкие к эквидистантным линии, а ширина снимаемой при каждом проходе резца стружки примерно постоянная. Вес это способствует снижению уоовня
S
шероховатости и повышению точности обработки.
Согласованное с S и S перемещение Л резца 3 предварительно табулируется с необходимой точностью, после этого заносится в запоминающее устройство (не показано), которое с необходимой частотой выдает сигнал на исполнительный механизм 7.
Формула изобретения
Устройство для обработки асферических поверхностей точением, содержащее
станину с рабочим шпинделем, предназначенным для закрепления детали, инструментальный шпиндель с резцедержателем и исполнительным механизмом, один конец которого соединен с резцедержателем, а
другой - с инструментальные шпинделем с возможностью поворота, отличающее- с я тем, что, с целью расширения технологических возможностей и повышения качества обрабатываемой поверхности,
устройство снабжено штангой, установленной на станине с возможностью вращения относительно центра, проходящего через ось рабочего шпинделя, и соединенной с инструментальным шпинделем перпендикулярно его оси, при этом резцедержатель соединен с инструментальным шпинделем с возможностью вращения в плоскости, проходящей через ось вращения штанги, а испопнительный механизм предназначен для регулировки расстояния между осью ин- срфументального шпинделя и центром резцедержателя.
OU.
| Способ токарной обработки асферических поверхностей и устройство для его осуществления | 1983 |
|
SU1103947A1 |
| кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
