Изобретение относится к мащннострое- нию, в частности к обработке эвольвент- ных цилиндрических зубчатых колес. . Цель изобретения - расширение технологических возможностей за счет обработки в условиях обката при согласованном перемещении геометрической оси колеса с осью его поворота.
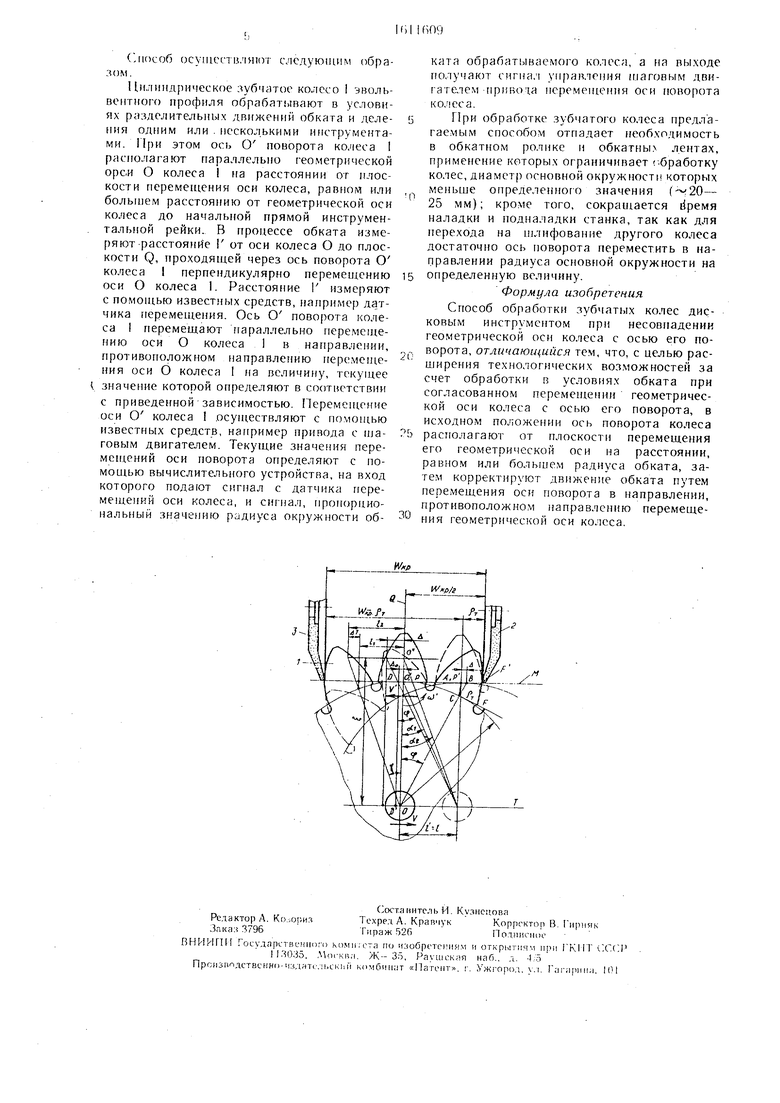
На чертеже показана расчетная схема образования эвольвентного профиля где приняты обозначения:
-радиус окружности обката обрабатываемого колеса;
- расстояние от оси поворота колеса до плоскости перемещения геометрической оси колеса;
-длина общей нормали колеса;
-текущий радиус кривизны эво.чь- вентного ггрофиля;
ГаГ
Гк„.
р..
О , О Р, Р
Ф
0.1 0.2
V
v
геометрическая ось колеса;
-ось поворота колеса;
полюс станочного зацепления в- двух положениях обката;
-- угол поворота колеса вокруг геометрической оси при обработ ке точки профиля с радиусом fv;
-угол поворота колёса вокруг оси поворота О в случае отс а-ствия перемеп1ения оси поворота;
-угол поворота колеса вокруг оси О в случае отсутствия перемещения оси поворота;
-направление перемещения оси колеса в процессе обката от среднего положения в положение обработки точки Г- профиля с радиусом кривизны (v;
-lUinpaB.-iCHHc перемещепия оси попорота колеса;
о:
О)
о
(Х
w маправлонио попорота колеса вокруг оси поворота; Л теку|цсе значение перемещения оси
попорота колеса при Д-текущее значение перемещения
оси поворота при Г - текущее расстояние от геометрической оси колеса по плоскости, проходящей через ось поворота колеса перпендикулярно перемепк- иию оси колеса;
d -плоскость, проходящая через ось- поворота колеса перпендикулярно перемещению оси колеса; у плоскость перемещения геометри- Iческой оси колеса;
I ;vj-начальная прямая инструменталь1ной рейки.
I Г1ри обработке зубчатых колес ось поворота О или О колеса 1 располагают параллельно геометрической оси О колеса 1 на расстоянии от плоскости перемещения оси колеса, равном или большем расстоянию от геометрической оси колеса до начальной прямой инструментальной I рейки. . На чертеже изображен .частный I случай, когда ось О и О в среднем I положении обката расположена в плоскости, I проходящей через полюс станочного за- I цепления Р перпендикулярно перемещению : оси колеса. Необходимость в обкатном ролике и обкатных лентах при обработке предлагаемым способом отпадает.
При перемещении оси О колеса 1 на расстояние (как в известном способе) колесо. 1 поворачивается в направлении стрелки w вокруг оси О или О на ; угол ОС, не равный углу ф. Для того, i чтобы колесо 1 повернулось на угол ф, ось I Поворота О или О перемещают в на- i правлении стрелки V , противоположном направлению движения оси колеса О на величину Лч или Д. В результате этих движений точка С, лежащая на окружности обката Го5, приходит в точку А, а точка F профиля зуба колеса 1 перемещается в точку F , как в известном способе, где находится профилирующая точка круга 2. В этот момент круг 3 будет обрабатывать противоположный зуб колеса 1 в точке с радиусом кривизны эвольвенты, равным
UJ KPрг.
Согласно чертежу можно записать
2oS
откуда
,пеф-(-| -р).
Так как -рг ; ,
,Л,,, t
го
i;
l - -t -ил ° -
/ - До г ё to b
(Р+Л.) g;
(n,.tg4--e))- Е
гоЪ
гл
,- L Отсюда имеют Artg--Р. (1)
1оЪ
При обработке косозубого колеса с продольной подачей переме цения оси О поворота колеса зависит не только от |фазы обката, но н от продольного перемещения колеса 1 относительно кругов 2 и 3, причем закон смеп1ения оси поворота О в зависимости от продольного перемещения колеса следугопшй. Как известно, угол поворота колеса в зависимости от величины продольного перемещения и угла piij наклона зубьев на окружности
обката Р
Далее получают
равен .
Сч
30
2 Г tgY ,.А.. Е,г„г,rofi - :
00УОО
,,; A, f2--Ki;
A,:rtg-% -Ltg,,,
М
(2)
где А - текущее значение перемещения оси поворота колеса;
Гап - радиус окружности обката обрабатываемого колеса;
Е - - текущее расстояние от геометрической оси колеса до плоскости, проходящей через ось поворота колеса перпендикулярно перемещению оси колеса при наимень- щем расстоянии между этими осями;
г - расстояние от оси поворота коле- са до плоскости перемещения
геометрической оси колеса. Соотношение (1) справедливо не только ля случая зубощлифования О-градусным методом тарельчатыми кругами, но и для случая зубощлифования угловым методом арельчатыми, коническими и плоскими кругами, 0-градусным методом плоскими кругами, а также нарезания эвольвемтных зубьев цилиндрических колес при раздельных движениях обката и деления.
Соотно1иение 2) справедливо в случае
1илифоваиия косозубых колес на станках,
имеющих движение спиралеобразоваиия,
например на станках, работающих двумя
тарельчатыми кругами.
осупачлиликуг с-лслующим обра
С, гюсоб зом.
Цилиндрическое зубчатое колесо 1 эволь- веитиоп) профиля обрабатывают в условиях разделительных движений обката и деления одним или . несколькими инструментами. При этом ось О поворота колеса 1 раснолагают нараллельно геометрической орси О колеса I на расстоянии от плоскости неремещенин оси колеса, равном или больиюм расстоянию от геометрической оси колеса до начальной прямой инструментальной рейки. В процессе обката измеряют расстояние Г от оси колеса О до плоскости Q, проходящей через ось поворота О колеса I перпендикулярно переменхению оси О колеса 1. Расстояние Г измеряют с помон1ью известных средств, например датчика ггеремещения. Ось О поворота колеса I перемещают Параллельно неременге- нию оси О колеса 1 в направлении, противоположном направлению иеремеп1е- ния оси О колеса 1 на величину, текущее значение которой определяют в соответствии с приведенной зависимостью. Перемеи1ение оси О колеса осуи ествляют с известных средств, например привода с nja- говым двигателем. Текущие значения пере- меплений оси поворота определяют с помощью вычислительного устройства, на вход которого подают сигнал с датчика перемещений оси колеса, и сигнал, проиорнио- иальный значению радиуса окружности об5
ката обрабатываемого колоса, а на выходе получают сигиа.ч управления н.тговым двигателем ripnBO ia неремеи1ения оси юворота колеса.
При обработке зубчатого колеса предлагаемым способом отпадает необходимость в обкатном ролике и обкатны лентах, применение которых ограничивает с.бработку колес, диаметр основной окружности которых меньще определенного значения (-v20- 25 мм); кроме того, сокращается йремя наладки и подналадки станка, так как для перехода на нктифование другого колеса достаточно ось поворота переместить в направлении радиуса основной окружности на определенную величину.
Формула изобретения Способ обработки зубчатых колес дисковым инструментом при несовпадении геометрической оси колеса с осью его поворота, отличающийся тем, что, с целью рас- щирения технологических возможностей за счет обработки в условиях обката при согласованном перемен1ении геометрической оси колеса с осью его поворота, в исходном положении ось поворота колеса располагают от плоскости перемещения его геометрической оси иа расстоянии, равном или большем радиуса обката, затем корректируют движение обката путем перемещения оси поворота в направлении, противоположном направлению перемеще- ПИЯ геометрической оси колеса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обработки зубчатых колес | 1988 |
|
SU1696192A1 |
| Способ обработки зубчатых колес | 1988 |
|
SU1696191A1 |
| Способ шлифования зубьев цилиндрических зубчатых изделий | 1986 |
|
SU1426711A1 |
| Станок для шлифования зубьев цилиндрических зубчатых колес | 1980 |
|
SU1030114A1 |
| Способ шлифования зубчатых колес и станок для его осуществления | 1978 |
|
SU880244A3 |
| СТАНОК ДЛЯ ОБРАБОТКИ АРОЧНЫХ ЗУБЬЕВ ЗУБЧАТЫХ КОЛЕС | 1994 |
|
RU2074794C1 |
| Способ шлифования эвольвентных профилей цилиндрических зубчатых колес и станок для его осуществления | 1985 |
|
SU1574163A3 |
| СТАНОК ДЛЯ ОБРАБОТКИ АРОЧНЫХ ЗУБЬЕВ ЦИЛИНДРИЧЕСКИХ КОЛЕС | 1997 |
|
RU2123915C1 |
| Способ задания режимов резания при шлифовании цилиндрических зубчатых колес | 1987 |
|
SU1530351A1 |
| СТАНОК ДЛЯ ОБРАБОТКИ ЦИКЛОИДАЛЬНОГО ПРОФИЛЯ ЗУБА ПРЯМО- И КОСОЗУБЫХ ЦИЛИНДРИЧЕСКИХ ЦИКЛОИДАЛЬНЫХ ЗУБЧАТЫХ КОЛЕС | 2018 |
|
RU2688114C1 |
Изобретение относится к области машиностроения, в частности к обработке эвольвентных цилиндрических зубчатых колес. Цель изобретения - расширение технологических возможностей за счет обработки в условиях обката при согласованном перемещении геометрической оси колеса с осью его поворота. Поставленная цель достигается тем, что шлифование зубчатых колес выполняют при несовпадении геометрической оси колеса с осью его поворота. В исходном положении ось поворота колеса располагают от плоскости перемещения его геометрической оси на расстоянии, равном или большем радиуса обката. Движение обката корректируют путем перемещения оси поворота в направлении, противоположном направлению перемещения геометрической оси колеса. При обработке колес данным способом отпадает необходимость в обкатном ролике и обкатных лентах, использование которых ограничивает обработку колес, диаметр которых меньше определенного значения, поскольку для перехода на обработку другого колеса достаточно переместить ось поворота в направлении радиуса основной окружности на определенную величину. 1 ил.
| Бушуев В | |||
| В | |||
| и др | |||
| Тяжелые зубообрабатывающие станки | |||
| - М.- Машиностроение, I986, с 2I3 |
