В высокопрецизионных приборах, содержащих поплавковые гироузлы, важное значение имеет точная балансировка гироузлов, обеспечиваюндая минимальный момент трения иапф гироузла в опорах иодвеса. Поэтому весовая балансировка для получения нулевой плавучести проводится с максимально достижимой точностью.
Известен способ весовой балансировки, заключающийся в том, что нредварительная балансировка (по дифференту и статическому моменту) и окончательная (по весу) производятся в открытой ванне с поддерживающей жидкостью при температуре, близкой к рабочей, путем измегюпия веса гнроузла. В этом способе ие идентичны пснытательпые н рабочие условия.
Предлагаемый способ позволяет повысить точность балансировки ио весу. Для этого окончательную весовую балансировку гироузла производят Б собранном гиропрнборе в условиях, идентичных рабочим, подбором сопротивлений, шунтирую1дих плечи моста термостатического реле. Это дает возможность создать внутри прибора температуру, обеспечивающую плотность поддерживающей жидкости, иеобходимую для получения плавучести гироузла в гироприборе.
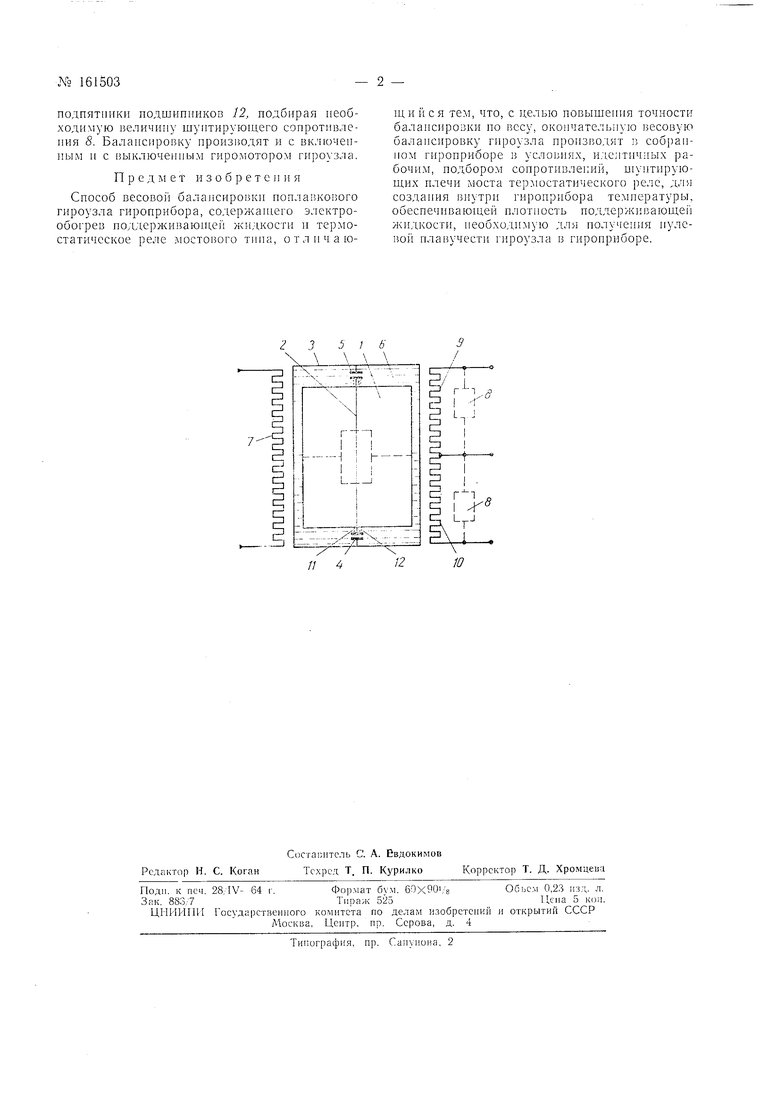
На чертеже изображен гироприбор.
Поилавковый гироузел /, предварительно отбалансированньп по весу, дифференту и статическому моменту относительно продольной оси 2, устанавливают в корпус 3 прибора так, чтобы ось 2 была вертикальна. Под действием положительного или отрицательного остаточного веса гироузел прижимается к 1П1Жнему подпятнику 4 или к верхнему 5. (Под остаточиыд весом гнроузла понимается разность между весом гнроузла на воздухе и выталкивающей силой, действующей иа него в поддерживающей жидкости 6 при рабочей температуре, создаваемой обогревательным элементом 7 прибора). Присоединяя шунтирующее сопротивление 8 либо к термочувствительному плечу 9, либо к постоянному плечу/( моста термореле прпбора, изменяют с высокой точностью рабочую температуру поддерживающей жидкости и, следовательно, ее плотность и величииу выталкивающей силы, добиваясь нулевой плавучеети гироузла. Диапазон изменения температуры определяют предельно допустимым давлением цапф // па
подпятники подшипников 12, подбирая необходимую величину шунтирующего сопротивления 8. Балансировку производят и с включенным и с выключенным гиромотором гироузла.
Предмет изобретения
Способ весовой балансировки поплавкового гироузла гироприбора, содержан1его электрообогрев поддерживающей жидкости и термостатическое реле мостового тнна, отличающийся тем, что, с целью повыщеиия точности балапсировки ио весу, окончательную весовую балансировку гироузла производят в собранном гироприборе в условиях, идс;гтичпых рабочим, подбором сопротивлений, щунтирующих плечи моста термостатического реле, для создапия виутри гироприбора температуры, обеспечивающей плотность поддерживающе жидкости, необходимую для получения нулевой плавучести гироузла в гироириборе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОВЕРКИ ДЕФЕКТА ОПОР ГИРОУЗЛА В ПОПЛАВКОВОМ ГИРОСКОПИЧЕСКОМ ДАТЧИКЕ УГЛОВОЙ СКОРОСТИ (ВАРИАНТЫ) | 2019 |
|
RU2730369C1 |
| Устройство для балансировки поплавковых гироузлов | 1980 |
|
SU983476A1 |
| Устройство для балансировки поплавковых гироузлов | 1980 |
|
SU957026A1 |
| ГИРОСКОПИЧЕСКИЙ ТРЕХСТЕПЕННЫЙ ПОПЛАВКОВЫЙПРИБОР | 1966 |
|
SU182346A1 |
| УСТАНОВКА ДЛЯ ОПРЕДЕЛЕНИЯ СМЕЩЕНИЯ ЦЕНТРА ТЯЖЕСТИ ГИРОМОТОРА ВДОЛЬ ОСИ ВРАЩЕНИЯ РОТОРА | 1964 |
|
SU164995A1 |
| СПОСОБ БАЛАНСИРОВКИ И ОПРЕДЕЛЕНИЯ ЦЕНТРА ТЯЖЕСТИ ПОПЛАВКОВУДК | 1964 |
|
SU161554A1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПЕРЕМЕННОЙ СОСТАВЛЯЮЩЕЙ ВЫХОДНОГО СИГНАЛА ЭЛЕКТРОМЕХАНИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ (ДУС) НА ЭТАПЕ ИЗГОТОВЛЕНИЯ ЕГО ГИРОМОТОРА ПО ХАРАКТЕРИСТИКАМ УГЛОВЫХ ВИБРАЦИЙ, ВОЗБУЖДАЕМЫХ ГИРОМОТОРОМ, И УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2427801C2 |
| АСТАТИЧЕСКИЙ ПОПЛАВКОВЫЙ ГИРОКОМПАС | 1969 |
|
SU252636A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ДИФФЕРЕНТА ДВУХСТЕПЕННОГО ПОПЛАВКОВОГО ГИРОПРИБОРА, НАПРИМЕР ИНТЕГРИРУЮЩЕГО ГИРОСКОПА | 1977 |
|
SU1840722A1 |
| СПОСОБ ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ГИДРОДИНАМИЧЕСКОГО ГИРОСКОПА | 2005 |
|
RU2291398C1 |
Z 3 516
-Ч
//
-S&-.
Г V
Т
