Техническое решение относится к области гироскопической техники и может быть использовано при создании миниатюрного гидродинамического гироскопа повышенной точности.
Аналогом для заявляемого технического решения является способ гидродинамического подвеса сферического чувствительного элемента (поплавка) гидродинамического гироскопа [1], включающий полное заполнение жидкостью радиального зазора между сферическим поплавком и камерой, обеспечивающее при этом нейтральную плавучесть поплавка, а также собственное вращение сферической камеры и поплавка. Недостатком аналога является зависимость плавучести чувствительного элемента гидродинамического гироскопа (ЧЭ ГДГ) от температуры окружающей среды из-за изменения от температуры плотности поддерживающей поплавок жидкости. В связи с этим для получения необходимой точности измерения параметров углового движения основания гидродинамический гироскоп необходимо термостатировать, что усложняет его конструкцию.
Прототипом для заявляемого способа выбран способ подвеса ЧЭ ГДГ, представленный в [2] (глава 6), который включает частичное заполнение радиального зазора между поплавком и камерой рабочей жидкостью, обеспечивающей равенство массы поплавка и вытесненной им жидкости в аксиальном направлении, и собственное вращение подвеса поплавка ГДГ.
Недостаток технического решения, выбранного за прототип, состоит в том, известный способ подвеса ЧЭ ГДГ не позволяет реализовать подвес сферического поплавка с заданной точностью малогабаритного ЧЭ ГДГ в экстремальных эксплуатационных условиях. Этот недостаток может быть устранен путем реализации комбинированного подвеса сферического поплавка внутри цилиндрического поплавка гидродинамического акселерометра. Такой подвес может быть реализован при миниатюризации гидродинамического гироскопа до размеров и массы, обеспечивающих гидродинамическое центрирование поплавка ГДА.
Задача технического решения - реализация подвеса чувствительного элемента малогабаритного гидродинамического измерителя угловых перемещений повышенной точности.
Решение поставленной задачи подвеса чувствительного элемента гидродинамического гироскопа включает частичное заполнение радиального зазора между сферическим поплавком и камерой рабочей жидкостью, обеспечивающей равенство массы сферического поплавка и вытесненной им жидкости в аксиальном направлении, собственное вращение подвеса сферического поплавка гироскопа, имеет особенность такую, что выполняют гироузел сферического гидродинамического подвеса сферического поплавка цилиндрической формы, помещают его в цилиндрическую камеру, заполненную вязкой жидкостью плотностью ρ1, обеспечивают аксиальную плавучесть цилиндрического гироузла близкую к нейтральной, осуществляют собственное вращение цилиндрического гироузла-поплавка от внешнего привода, при этом центрируют сферический поплавок в сферическом гидродинамическом подвесе и цилиндрический гироузел-поплавок в цилиндрическом гидродинамическом подвесе, при действии осевых ускорений ограничивают осевое смещение цилиндрического гироузла-поплавка посредством гидродинамического демпфирования, а при отклонениях оси собственного вращения сферической камеры от оси вращения сферического поплавка формируют выходные сигналы гироскопа об этих угловых перемещениях основания.
Второй вариант решения. Решение задачи подвеса чувствительного элемента гидродинамического гироскопа и акселерометра включает частичное заполнение радиального зазора между сферическим поплавком и камерой рабочей жидкостью, обеспечивающей равенство массы поплавка и вытесненной им жидкости в аксиальном направлении, собственное вращение подвеса сферического поплавка гироскопа, имеет особенность такую, что выполняют гироузел сферического гидродинамического подвеса сферического поплавка цилиндрической формы, помещают его в цилиндрическую камеру, радиальный зазор которой заполняют вязкой жидкостью плотностью ρ1, заполняют торцевые зазоры цилиндрического гидродинамического подвеса одинаковыми объемами жидкости плотностью ρ2 несмешивающейся с жидкостью плотностью ρ1, причем плотность ρ2 выбирают большей плотности ρ1, обеспечивают аксиальную плавучесть цилиндрического гироузла близкую к нейтральной, осуществляют собственное вращение цилиндрического гироузла-поплавка от внешнего привода, при этом центрируют сферический поплавок в сферическом гидродинамическом подвесе и цилиндрический гироузел-поплавок в цилиндрическом гидродинамическом подвесе, при действии осевых ускорений ограничивают осевое смещение цилиндрического гироузла-поплавка посредством гидродинамического демпфирования и силы гидродинамического давления, формируемой за счет перераспределения торцевых объемов жидкости при аксиальных перемещениях цилиндрического гироузла-поплавка, а при отклонениях оси собственного вращения сферической камеры от оси вращения сферического поплавка формируют выходные сигналы гироскопа об этих угловых перемещениях основания.
НОВИЗНА. Впервые предложен цилиндрический гидродинамический подвес с не вращающейся цилиндрической камерой ротора - гироузла сферического гидродинамического подвеса сферического поплавка гидродинамического гироскопа.
ОБОСНОВАНИЕ. Решение позволит минимизировать погрешность гироскопа, обусловленную подшипниковым подвесом гироузла сферического гидродинамического подвеса [4], возникающую из-за радиального смещения центра масс поплавка в условиях неизбежной аксиальной качки гироузла в подшипниках качения на частоте собственного вращения.
На чертеже дана конструктивная схема гироскопа с цилиндрическим подвесом посредством несмешивающихся жидкостей сферического гидродинамического подвеса чувствительного элемента - сферического поплавка, где 1 - сферическая поплавковая камера; 2 - сферический поплавок; 3 - цилиндрическая вставка кольцевого магнита; 4 - кольцевая сигнальная катушка системы съема сигнала с поплавка; 5 - обмотки, которые могут быть использованы для съема сигнала об аксиальных движениях поплавка; ρ1, ρ2 - плотности несмешивающихся жидкостей; N, S - полюса кольцевых магнитов цилиндрического гироузла для осуществления бесконтактного привода его собственного вращения.
Способ подвеса чувствительного элемента гидродинамического гироскопа реализуется следующим образом.
Решение поставленной задачи подвеса чувствительного элемента гидродинамического гироскопа включает частичное заполнение радиального зазора между сферическим поплавком и камерой рабочей жидкостью, обеспечивающей равенство массы сферического поплавка и вытесненной им жидкости в аксиальном направлении, собственное вращение подвеса сферического поплавка гироскопа, имеет особенность такую, что
- выполняют гироузел сферического гидродинамического подвеса сферического поплавка цилиндрической формы,
- помещают его в цилиндрическую камеру, заполненную вязкой жидкостью плотностью ρ1,
- обеспечивают аксиальную плавучесть цилиндрического гироузла близкую к нейтральной,
- осуществляют собственное вращение цилиндрического гироузла-поплавка от внешнего привода, при этом центрируют сферический поплавок в сферическом гидродинамическом подвесе и цилиндрический гироузел-поплавок в цилиндрическом гидродинамическом подвесе,
- при действии осевых ускорений ограничивают осевое смещение цилиндрического гироузла-поплавка посредством гидродинамического демпфирования,
- а при отклонениях оси собственного вращения сферической камеры от оси вращения сферического поплавка формируют выходные сигналы гироскопа об этих угловых перемещениях основания.
Второй вариант решения. Решение задачи подвеса чувствительного элемента гидродинамического гироскопа включает частичное заполнение радиального зазора между сферическим поплавком и камерой рабочей жидкостью, обеспечивающей равенство массы поплавка и вытесненной им жидкости в аксиальном направлении, собственное вращение подвеса сферического поплавка гироскопа, имеет особенность такую, что
- выполняют гироузел сферического гидродинамического подвеса сферического поплавка цилиндрической формы,
- помещают его в цилиндрическую камеру, радиальный зазор которой заполняют вязкой жидкостью плотностью ρ1,
- заполняют торцевые зазоры цилиндрического гидродинамического подвеса одинаковыми объемами жидкости плотностью ρ2 несмешивающейся с жидкостью плотностью ρ1, причем плотность ρ2 выбирают большей плотности ρ1,
- обеспечивают аксиальную плавучесть цилиндрического гироузла близкую к нейтральной,
- осуществляют собственное вращение цилиндрического гироузла-поплавка от внешнего привода, при этом центрируют сферический поплавок в сферическом гидродинамическом подвесе и цилиндрический гироузел-поплавок в цилиндрическом гидродинамическом подвесе,
- при действии осевых ускорений ограничивают осевое смещение цилиндрического гироузла-поплавка посредством гидродинамического демпфирования и силы гидродинамического давления, формируемой за счет перераспределения торцевых объемов жидкости при аксиальных перемещениях цилиндрического гироузла-поплавка,
- а при отклонениях оси собственного вращения сферической камеры от оси вращения сферического поплавка формируют выходные сигналы гироскопа об этих угловых перемещениях основания.
Технический результат. Повышение точности миниатюрного подвеса чувствительного элемента гидродинамического гироскопа.
Технический эффект получается за счет осуществления цилиндрического гидродинамического подвеса гироузла сферического гидродинамического подвеса сферического поплавка.
Источники информации
1. Горенштейн И.А. Гидродинамические гироскопы. Москва: Машиностроение, 1972 (аналог, съем сигнала с поплавка стр.10, 11, 104, 105).
2. Андрейченко К.П. Динамика поплавковых гироскопов и акселерометров. Москва: Машиностроение, 1987 (прототип способа подвеса с.7, глава 6).
3. Андрейченко К.П., Иващенко В.А., Смарунь А.Б. Динамика поступательного движения чувствительного элемента гидродинамического гироскопа с частичным заполнением камеры рабочей жидкостью. (Сарат. политех. ин-т. - Саратов, 1987, - деп. 13.01.88 в ВИНИТИ №187-В 88).
4. Андрейченко К.П., Иващенко В.А., Платонова Т.Ф. Дрейф нуля поплавкового гидродинамического гироскопа, обусловленный механикой подвеса его чувствительного элемента (Сарат. политех. ин-т. - Саратов, 1989. - деп. 14.03.89 в ВИНИТИ №1926-В 89).
Изобретение относится к области гироскопической техники и может быть использовано при создании миниатюрного гидродинамического гироскопа повышенной точности. Способ подвеса чувствительного элемента гидродинамического гироскопа заключается в осуществлении цилиндрического гидродинамического подвеса гироузла сферического гидродинамического подвеса сферического поплавка. Технический результат: повышение точности миниатюрного подвеса чувствительного элемента гидродинамического гироскопа. 2 н.п. ф-лы, 1 ил.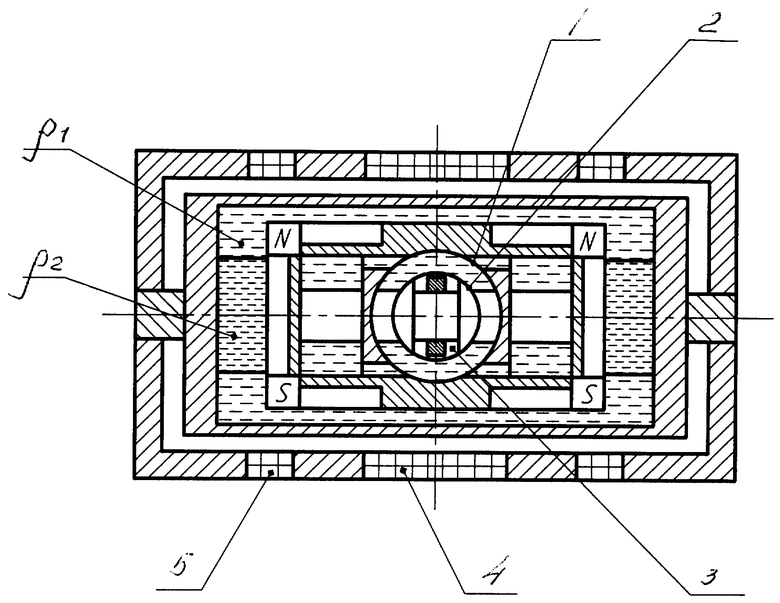
| Андрейченко К.П | |||
| Динамика поплавковых гироскопов и акселерометров | |||
| Москва, Машиностроение, 1987, гл.6, с.7 | |||
| Гироскоп с гидродинамическим подвесом | 1982 |
|
SU1073578A1 |
| ГИДРОДИНАМИЧЕСКИЙ ГИРОСКОП | 1995 |
|
RU2116623C1 |
| US 5245880 A, 21.09.1993 | |||
| МАГНИТОГИДРОДИНАМИЧЕСКИЙ СПОСОБ ПРЕОБРАЗОВАНИЯ ТЕПЛОВОЙ ЭНЕРГИИ В ЭЛЕКТРИЧЕСКУЮ ЗАМКНУТОГО ЦИКЛА | 2002 |
|
RU2226737C2 |

