сэ со
Изобретение относится к устройствам для определения степени загрузки большегрузных автосамосвалов и может быть использовано в горной, строительной и других отраслях промышленности народного хозяйства.
Цель изобретения - повышение точности контроля загрузки автосамосвала.
На чертеже изображена блок-схема устройства.
Устройство содержит датчик 1 перемещений, расположенный между рамой и задним мостом автосамосвала и закрепленный на поперечной балке ра мы, шифратор 2, пороговьй блок 3, датчик 4 положения кузова, установленный на раме автосамосвала под кузовом датчик 5 начала движения, установлен- ный на тумблере переключений скоростей, коммутатор 6, регистр 7 фактической загрузки, сумматор 8, выходной блок 9, регистр 10 начальной загрузки блок 11 индикации.
Устройство работает следующим образом.
При включении электропитания автосамосвала напряжение питания поступает на электронную схему устройства.
В регистры начальной 10 и фактической 7 загрузки заносится начальный код, поступающий с датчика 1 перемещений через шифратор 2. Начальный код с регистров фактической 7 и начальной 10 загрузки поступает на сум- матор 8 и результат высвечивается на блоке 11 индикации, который установлен в кабине водителя (нулевая загрузка).
Пороговый блок 3 предназначен для определения минимальной загрузки и управляет работой коммутатора 6, Если загрузка автосамосвала меньше минимальной, то пороговьй блок 3 запрещает работу коммутатора 6. Датчик 5 начала движения в этом случае не оказывает влияния на коммутатор бив регистрах начальной 10 и фактической 7 загрузки ранее записанный код остается без изменений.
При загрузке автосамосвала по достижении степени минимальной загрузки пороговый блок 3 вырабатывает сигнал разрешения работы коммутатора 6. Код с шифратора1, 2 поступает в регистр 7 фактической загрузки. По окончании загрузки автосамосвала водитель включает тумблер переключателя скоростей
j Q 5
-.
5
0
5
0
в положение Вперед, что приводит к срабатыванию датчика 5 начала движения. В результате коммутатор 6 вырабатывает сигнал, по которому блокируется содержимое регистра 7 фактической загрузки, вследствие чего содержимое этого регистра в процессе движения к пункту разгрузки не изменяется. При этом динамические факторы не оказывают влияния на показания устройства в процессе движения автосамосвала. Б пункте разгрузки при поднимании кузова срабатывает датчик 4 положения кузова и коммутатор 6 снимает блокировку с регистра начальной загрузки, а информация с датчика 1 перемещений через шифратор 2 с его второго выхода поступает на информационный вход регистра 10. При этом учитывается фактор налипания на кузов. При опускании кузова датчик 4 положения кузова и коммутатор 6 возвращаются в исходное состояние и блокируют содержимое регистра 10. Водитель вновь включает скорость, и содержимое регистра 7 вновь блокируется на период движения машины по направлению к новому пункту погрузки.
Формула изобретения
Устройство для контроля загрузки автосамосвала, содержащее весовое- принимающий узел и сумматор, выход которого соединен с входом блока индикации, отличающееся тем, что с целью повышения точности, в него введены датчик положения кузова , датчик начала движения, шифратор, пороговьй блок, регистр начальной и фактической загрузки, коммутатор, весовоспринимающий узел выполнен в виде датчика перемещений, который расположен между рамой и задним мостом автосамосвала, причем выход датчика перемещений соединен с входом шифратора, первый выход которого соединен с входом порогового блока, выход которого соединен с управляющим входом коммутатора, входы коммутации которого соединены соответственно с выходами датчиков йачала движения и положения кузова, первый и второй выходы коммутатора подсоединены соответственно к первым входам регистров фактической и начальной загрузки, вторые входы которых соединены с вторым выходом шифратора, а
516190596
выходы регистров Фактической и на- венно с первым и вторым входом сум- чальной загрузки соединены соответст- матора.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВЗВЕШИВАНИЯ ЗАГРУЗКИ АВТОСАМОСВАЛА | 1992 |
|
RU2042119C1 |
| Устройство для адресования и контроля движения автосамосвалов | 1976 |
|
SU732895A1 |
| Устройство для управления движе-НиЕМ АВТОТРАНСпОРТА | 1979 |
|
SU822229A1 |
| Устройство для измерения массы груза в кузове автосамосвала | 1986 |
|
SU1372196A1 |
| Многоканальное устройство для управления движением транспортного средства | 1989 |
|
SU1702395A1 |
| Способ управления скоростью конвейера | 1983 |
|
SU1113334A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОГРУЗОЧНО-ТРАНСПОРТНЫМИ СРЕДСТВАМИ НА КАРЬЕРАХ ПРИ СЕЛЕКТИВНОЙ ВЫЕМКЕ РУД И СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ КАЧЕСТВОМ РУДОПОТОКА НА ОСНОВЕ ЭКСКАВАТОРНО-АВТОМОБИЛЬНОГО КОМПЛЕКСА | 1996 |
|
RU2100844C1 |
| Устройство для взвешивания груза в автосамосвале | 1982 |
|
SU1049751A1 |
| Устройство для измерения массы груза в кузове автосамосвала | 1985 |
|
SU1290085A1 |
| СИГНАЛИЗАТОР ЗАГРУЗКИ ДВИГАТЕЛЯ | 1992 |
|
RU2027979C1 |
Изобретение относится к весоизмерительной технике. Цель изобретения - повышение точности контроля загрузки автосамосвала. При загрузке автосамосвала его рама перемещается относительно заднего моста. Это перемещение измеряется датчиком 1,информация от которого через шифратор 2 и регистры 7, 10 поступает в сумматор 8, где из информации регистра 7 вычитается информация порожнего веса автосамосвала регистра 10. Во время движения коммутатор 6 блокирует содержимое регистра 7. При разгрузке срабатывает датчик 4 положения кузова, снимающий блокировку с регистра 10. При этом учитывается фактор налипания на кузов. 1 ил.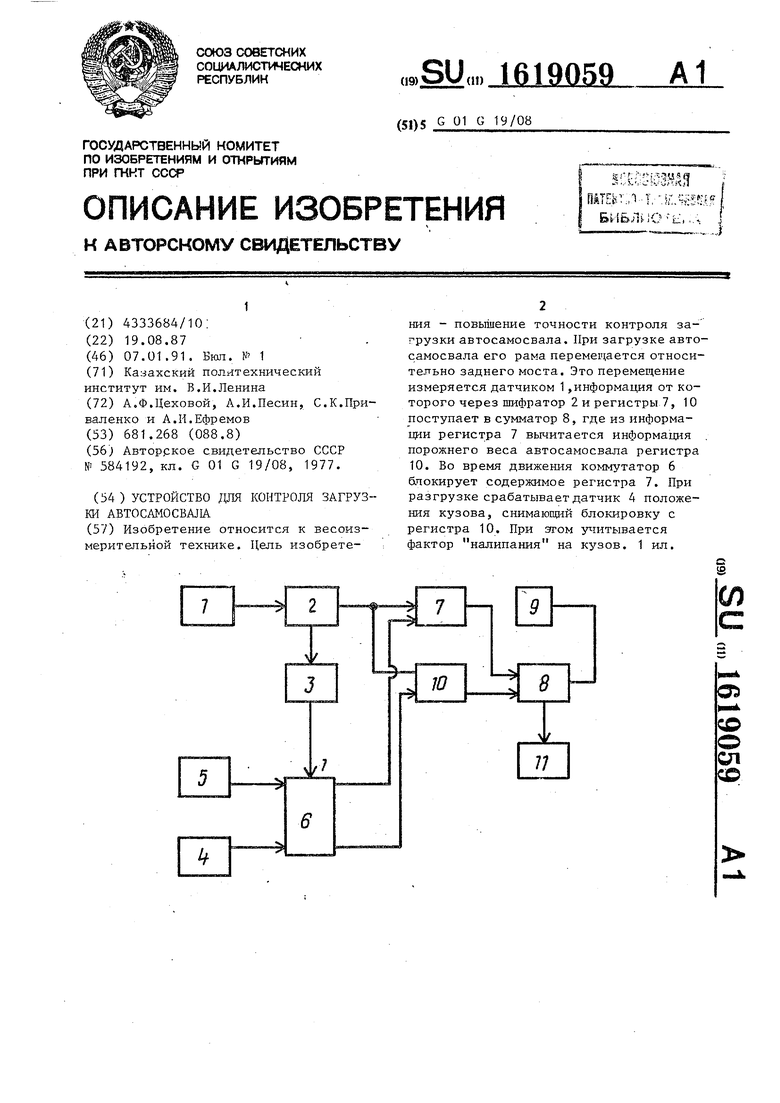
| Устройство для взвешивания груза в автосамосвале | 1976 |
|
SU584192A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
