(21) 4221977/21
(22) 07.04.87
(46) 07„01„91. Бюл„ № t
(72) С.В. Лисицын, Н.Е„ Герасимова
и Б.М. Кононов
(53)62„396.079(088.8)
(56)Патент Японии № 58-504071, кл. Н 01 G 13/00, 1983.
Авторское свидетельство СССР № 1264247,- кл. Н 01 G 13/00, 15.10,86.
(54)УСТРОЙСТВО ДНЯ КОНТРОЛЯ ЭЛЕКТРИЧЕСКИХ ПАРАМЕТРОВ РАДИОДЕТАЛЕЙ
(57)Изобретение относится к области контрольно-измерительного оборудования для тренировки и контроля электрических параметров радиодеталей и их элементов, а именно анодов конденсаторов. Целью изобретения является расширение функциональных возможностей устройства путем придания ему дополнительной
функции формирователя группы изделий. Каретка 4 с губками 5 для захвата радиодеталей 6, перемещаясь по направляющим 3 поворотного диска механизма загрузки, переносит радиодетали 6 с позиции отрезки от технологического носителя на позицию приварки монтажного вывода. Затем ролик 7 подпружиненной каретки 4 перемещается по копиру 8 к центру транспортного ротора 9 и подводит каретку 4 к позиции загрузки радиодеталей 6 в гнезда измерительной головки 19о Загрузка измерительной головки 19 продолжается по мере ее непрерывного шагового перемещения на позиции загрузки В это же время на позиции разгрузки другая измерительная головка 19 приходит в крайнее положение после ее разгрузки. 1 ЗсП. ф-ЛЫ, 6 ИЛ.
i (Я
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля электрических параметров радиодеталей | 1983 |
|
SU1264247A1 |
| Устройство для контроля и сортировки радиодеталей по электрическим параметрам | 1985 |
|
SU1308748A1 |
| Устройство для транспортирования радиодеталей с однонаправленными выводами | 1988 |
|
SU1559452A1 |
| Устройство для маркировки ци-лиНдРичЕСКиХ РАдиОдЕТАлЕй C OCE-ВыМи ВыВОдАМи | 1978 |
|
SU801127A1 |
| Устройство для сортировки радиодеталей по электрическим параметрам | 1982 |
|
SU1095472A1 |
| Устройство для групповой сборки и пайки монолитных керамических конденсаторов | 1988 |
|
SU1599912A1 |
| Автоматическая линия для изготовления радиодеталей | 1983 |
|
SU1128298A1 |
| Устройство для подачи радиодеталей с однонаправленными выводами к измерительному блоку | 1984 |
|
SU1220149A1 |
| Устройство для транспортирования радиодеталей | 1974 |
|
SU600626A1 |
| Устройство для съема изделий,преимущественно радиодеталей,с липкой ленты-носителя | 1985 |
|
SU1316102A1 |
Изобретение относится к контрольно- измерительному оборудованию для тренировки и контроля электрических параметров радиодеталей и их элементов, а именно для тренировки и контроля анодов конденсаторов.
Цель изобретения - расширение функциональных возможностей устройства путем придания ему дополнительной функции формирователя группы изделий.
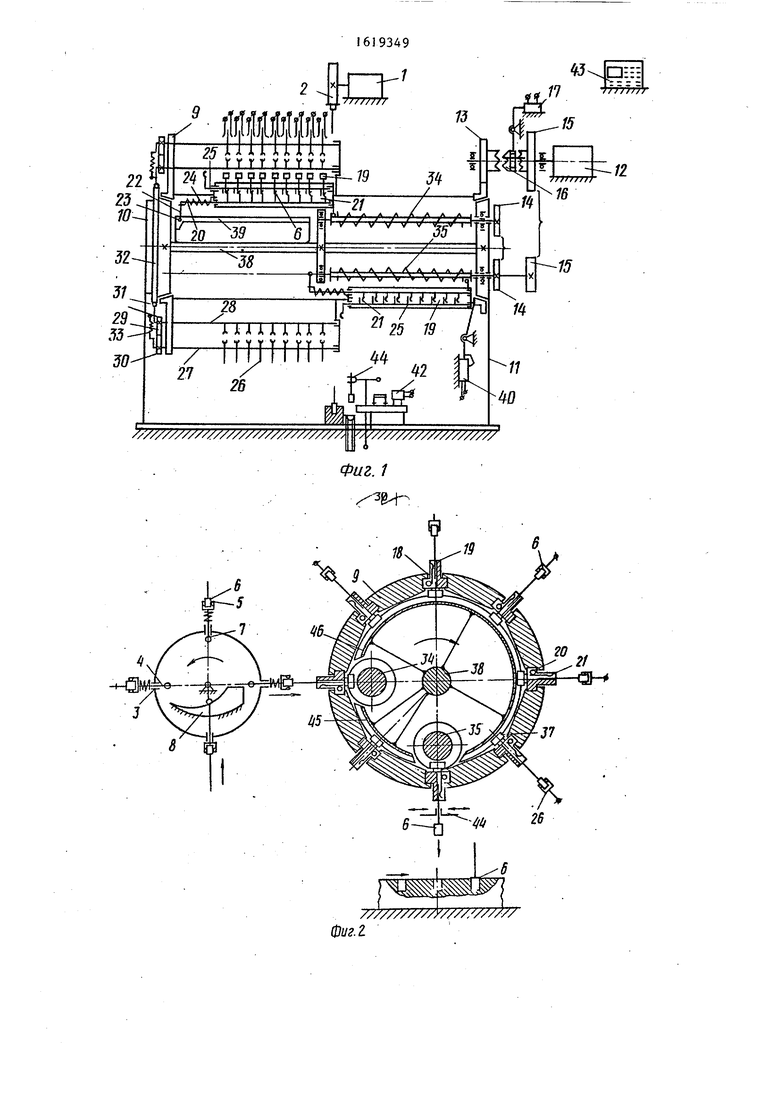
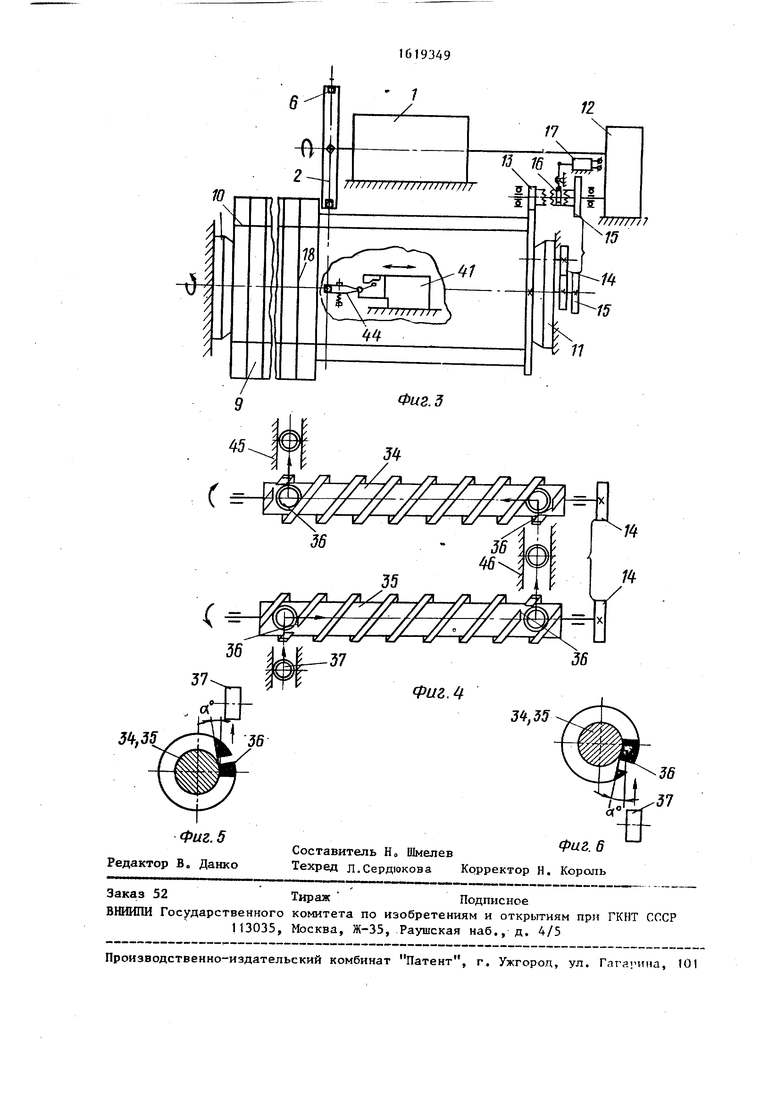
На фиг. 1 изображена общая схема устройства; на фиг. 2 - устройство, вид сбоку; на фиг. 3 - то же, вид сверху; на фиг. 4 - ходовые винты устройства со схемой движения копирных роликов; на фиг. 5 и 6 - схема расположения срезов на ходовых винтах,
соответственно во время выхода ролика из винтовой канавки и во время его входа в винтовую канавку.
Устройство содержит механизм 1 загрузки, выполненный в виде прерывистого вращающегося диска 2 с цилиндрическими направляющими 3, по которым перемещаются подпружиненные каретки 4 с губками 5 для захвата радиодеталей 6 и роликами 7, взаимодействующими с неподвижным копиром 8, установленным на корпусе механизма 1 загрузки.
Цилиндрический транспортный ротор 9, имеющий горизонтальную ось вращения, установлен на опорах 10, 11 и соединен с приводом 12 прерывистого
О СО
со
Ј СО
J16193
вращения через зубчатые колеса 13-15 и муфту 16, управляемому электромагнитом 17с
Для придания устройству дополни- 5 тельной функции формирователя группы изделий и обеспечения их группового контроля в транспортном роторе 9 параллельно его оси вращения дополнительно смонтированы направляющие 18 ю прямолинейного движения, расположенные по образующей цилиндра., Кроме того, в устройстве дополнительно введен привод шагового поступательного перемещения измерительных головок 19, раз-)5 мещенный на позициях загрузки и выгрузки изделий в транспортный ротор 9„ Каждая измерительная головка 19 подвижно закреплена в направляющей 18 пря- прямолинейного движения с возможно- 20 стью взаимодействия с указанным приводом шагового поступательного перемещения и чмеет валик 20 с установлении-- ми на нем прижатыми пружинами 21, рычаг 22с роликом 23 и пружину 24 кру- 25 чения0 Измерительные головки 19 через контактную шину 25 и контактные шетки 26, а также через электроконтактные элементы смонтированы на валиках 27 и 28, установленных на направляющих 30 18 транспортного ротора 9, связанных с источником электрического (измерительного или тренировочного) налряжеНИЯо
На одном конце валиков 27 и 28 ус- 35 тановлены находящиеся в зацеплении между собой зубчатые секторы 29 и 30 На зубчатом секторе 29 установлен ролик 31, взаимодействующий при вращении ротора 9 с неподвижно установлен- 40 ным на опоре 10 кулачком 32„ На зубчатых секторах 29 и 30 закреплена пружина 33 для размыкания электроконтактных элементов и отключения радиодеталей 6 от электрического напряжения д5 Привод шагового поступательного перемещения измерительных головок 19 размещен напротив механизмов загрузки и выгрузки и выполнен в виде двух ходовых винтов 34 и 35 с винтовой канав
кой 36 одинакового направления, установленных внутри транспортного ротора 9 параллельно его оси вращения в радиальной плоскости с направляющими 18 и соединенных с приводом 12 преры- вистого вращения На первом и последнем витках винтовой канавки каждого ходового винта 34 и 35 выполнены поперечные срезы для свободного входа
5 0 0
5 0 5
0
5
и выхода копирных роликов 37, закрепленных снизу каждой измерительной головки 19, в эту канавку с возможностью их взаимодействия с винтами и сообщения головкам 19 поступательного перемещения по направляющим 18.
Опоры 10 и 11 соединены стяжкой 38, на которой установлен упор 39, взаимодействующий с роликом 23 рычага 22„ На опоре 11 установлен бесконтактный датчик 40 для включения электромагнита 17 после прихода измерительной головки 19 в крайнее положение после разгрузки
Механизм 41 выгрузки радиодеталей
6установлен на станине устройства и через рычажную систему соединен с приводом 120 Механизм 41 выгрузки включает электромагнит 42, управляемый микропроцессором 43, и рабочие элементы съема деталей, выполненные в виде губок 440
Для исключения возможного перемещения копирных роликов 37 вдоль оси винтов 34 и 35 в то время, когда ролики находятся между этими винтами, предусмотрены ограничительные направляющие 45 и 46о
Устройство работает следующим об- разомо
Каретка 4 с губками 5 для захвата радиодеталей 6, перемещаясь по направляющим 3 поворотного диска 2 механизма 1 загрузки, переносит радиодетали 6 с позиции отрезки от технологического носителя на позицию приварки монтажного вывода Затем ролик
7подпружиненной каретки 4 перемещается по копиру 8 к центру транспортного ротора 9 и подводит каретку 4 к позиции загрузки радиодеталей 6 в гнезда измерительной головки 19„ Загрузка измерительной головки 19 продолжается по мере ее непрерывного шагового перемещения на позиции загрузки о В это же время на позиции разгрузки другая измерительная головка 19 приходит в крайнее положение после ее разгрузки При этом она воздействует на бесконтактный датчик 40, включающий электромагнит 17, который посред- ством зубчатой муфты 16 отключает вращение ходовых винтов 34 и 35 и через зубчатые колеса 13 приводит во вращение ротор 9 о
Транспортный ротор 9 поворачивается и ролик 23 рычага 22 сходит с упора 39 о При этом пружина 24 кручения
10
51619349
поворачивает валик 20 и пружины 21 прижимают выводы радиодеталей 6 к контактной шине 25, подводящей напряжение от коллектора через щетки 26. Копирные ролики 37 измерительной головки 19 на позиции загрузки и выгруз- ,ки выходят из винтовой канавки ходо- вых винтов 34 по направляющим 45 и 46 о Одновременно при повороте ротора 9 ролик 31 зубчатого сектора 29 наезжает на профиль кулачка 32 и поворачивает сектор 29 вместе с имеющим электроконтактные элементы валиком 27„ При этом сектор 29 через зубчатое зацепление поворачивает сектор 30, который, в свою очередь, поворачивает валик 28 вместе с его контактами, Таким образом, выводы радиодеталей (например, аноды)оказываются подключенными к источнику измерительного или испытательного напряжения, в данном конкретном случае тренировочного напряжения 0
цествляюцего шаговую подачу измерительной головки 19 с радиодеталями 6 для их разгрузки. Губки 44 механизма 41 выгрузки снимают радиодетали 6 с измерительной головки 19 и укладывают их в специальную сборочную кассету, а бракованные радиодетали 6 сбрасывают в бункер брака,
Таким образом, путем придания устройству дополнительной функции формирователя группы изделий расширяются функциональные возможности устройства , Формула изобретения
1„ Устройство для контроля электрических параметров радиодеталей, содержащее цилиндрический транспортный ротор с измерительными головками и механизм загрузки и выгрузки, отличающееся тем, что, с целью расширения функциональных возможностей путем придания устройству дополнительной функции формирователя Ротор 9 останавливается, и начина- 25 группы изделий в транспортном роторе
15
20
ется электротренировка, которая осуществляется в течение нескольких поворотов ротора 9 до тех пор, пока измерительная головка 19 с анодами не поступит на последнюю позицию элект- ротренировки, где и производится контрольное измерение каждой радиодетали Результаты измерения поступают в память микропроцессора 43„ При последующем повороте ротора 9 измерительная головка 19 с радиодеталями 6 поступает на позицию электрической разрядки радиодеталей 6„ Ротор 9 поворачивается и ролик 31 сектора 29 сходит с профиля кулачка 32„ Под действием пружины 33 оба валика 27 и 28 поворачиваются, отводя свои контакты от радиодеталей 6, и измерительная головка 19 поступает на позицию разгрузки„При этом копирный ролик 37 входит в винтовую канавку ходового винта 35, осу10
15
25
20
0
5
0
5
дополнительно смонтированы направляющие прямолинейного движения, расположенные по образующей цилиндра, дополнительно введен привод поступательного перемещения измерительных головок, размещенный напротив механизмов загрузки и выгрузки, а каждая измерительная головка подвижно закреплена в направляющих прямолинейного движения с возможностью взаимодействия с приводом поступательного перемещения„
2„ Устройство по па отличающееся тем, что привод поступательного перемещения .-ыполнен в виде ходовых винтов, кинематически связанных между собой и установленных внутри транспортного ротора, параллельно его оси, причем на первом и последнем витках винтовой канавки каждого винта выполнены поперечные срезы для входа и выхода копирных роликов„
9Z -Jtr
HD
/////////////////////
Я
А V/////////////////////////////////
9Z
Ц
1Ъ
Ч111Ш11
6 7C6I9
10
№
Фиг. 5
Редактор В. Данко
Фиг. 6
Составитель Н„ Шмелев
Техред Л.Сердюкова Корректор Н. Король
Фиг. 6
