Изобретение относится к авиационной технике, в частности к устройствам для буксировки тел.
Цель изобретения - повышение безопасности при переводе буксируемого тела из верхней полуплоскости в нижнюю относительно буксировщика.
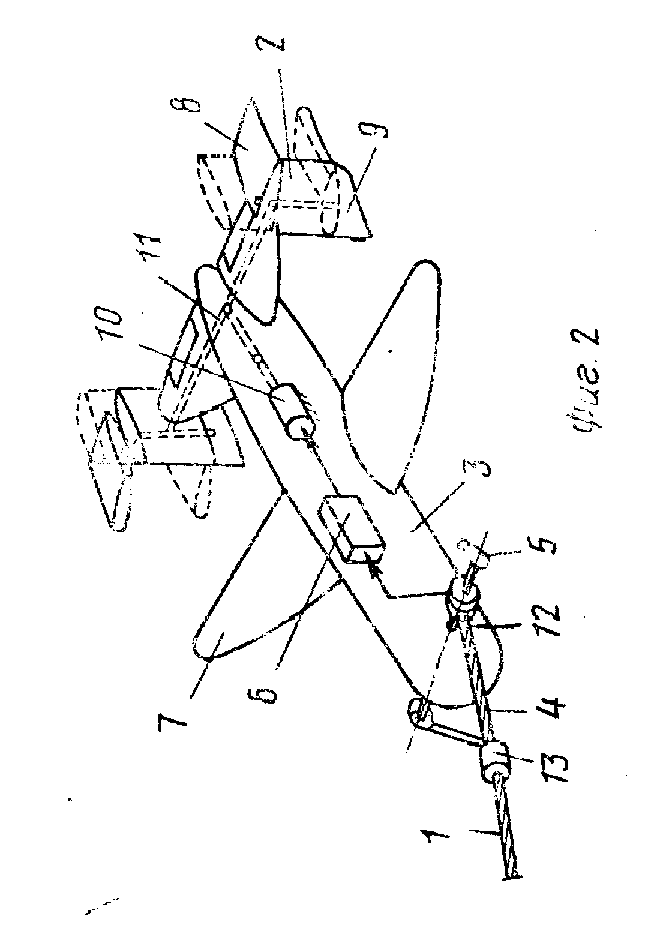
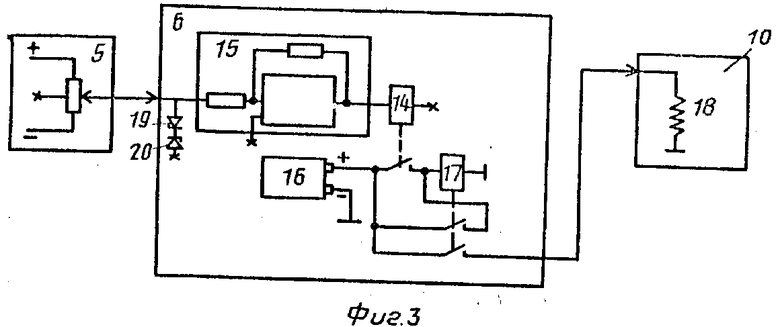
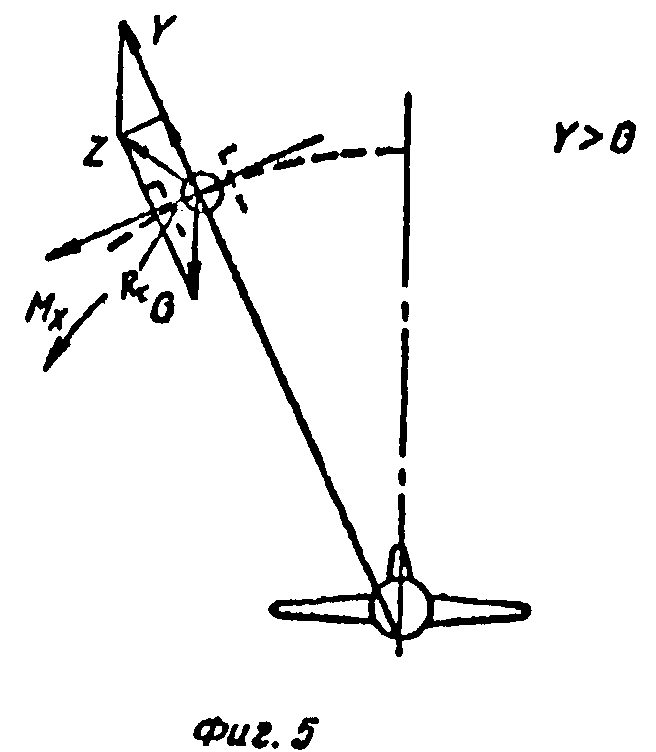
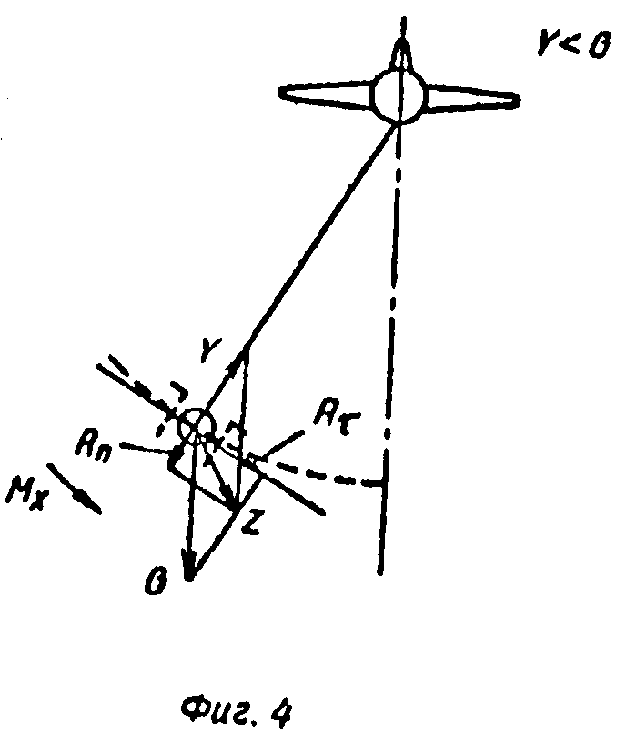
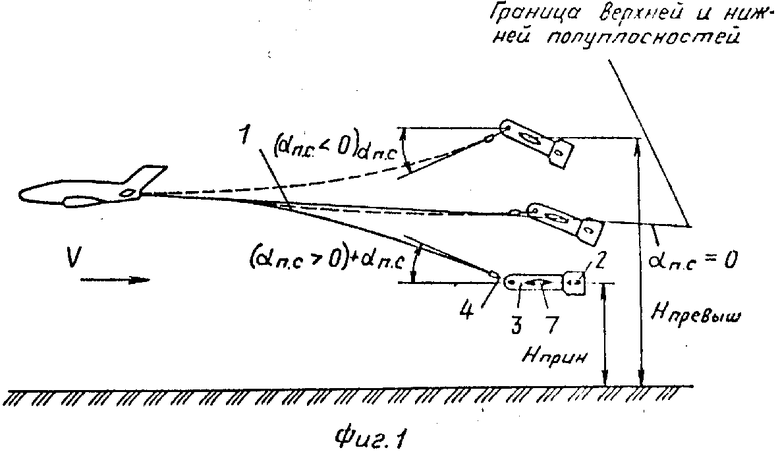
На фиг. 1 схематично изображено предлагаемое устройство; на фиг. 2 - буксируемое тело с механизмом его стабилизации по углу крена; на фиг. 3 - схема связи датчика угла атаки подвесной системы с приводом; на фиг. 4 - схема сил, действующих на буксируемое тело в нижней полуплоскости; на фиг. 5 - схема сил, действующих на буксируемое тело в верхней полуплоскости при первоначальном положении законцовки; на фиг. 6 - схема сил, действующих на буксируемое тело в верхней полуплоскости при изменении положения законцовок.
Устройство для буксировки тела содержит гибкую связь 1 и механизм 2 стабилизации буксируемого тела 3 по углу крена, выполненный в виде оперения. Устройство также снабжено подвесной системой 4, датчиком 5 угла атаки подвесной системы, переключателем 6. Буксируемое тело 3 имеет несущее крыло 7 и через подвесную систему 4 соединено с гибкой связью 1.
Механизм 2 стабилизации буксируемого тела по углу крена выполнен в виде вертикального оперения с законцовкой 8, образующей с оперением 2 Г-образную форму, и с законцовкой 9, являющейся продолжением оперения 2, а также привода 10, связанного с законцовками 8, 9 посредством тяг 11.
Датчик 5 угла атаки подвесной системы 4 размещен на ней и связан через переключатель 6 с приводом 10 механизма 2 стабилизации буксируемого тела по углу крена.
Подвесная система 4 выполнена в виде двух ветвей, закрепленных на оси 12, расположенной в поперечной плоскости буксируемого тела 3 с возможностью вращения вокруг нее.
Для разгрузки гибкой связи 1 от закручивания между ней и подвесной системой 4 установлен вертлюг 13.
Переключатель 6 выполнен в виде электромагнитного реле 14, операционного усилителя 15 и источника питания 16, например, постоянного тока, причем обмотка реле 14 соединена с выходом операционного усилителя 15, вход которого соединен с выходом датчика 5 угла атаки подвесной системы 4, а выход источника питания 16 через нормально разомкнутые контакты реле 17 (Р17.2), заблокированного контактами реле Р17.1 при срабатывании реле 14, соединен с обмоткой 18 привода 10, изменяющего положение законцовок 8 и 9.
Для срабатывания реле 14 в диапазоне углов атаки подвесной системы близких к 0, в переключателе 6 предусмотрены стабилитроны 19, 20.
Диапазон углов атаки подвесной системы, в котором срабатывает реле 14, определяется из конструктивных соображений, а именно, исходя из конструкции буксируемого тела, максимальной вертикальной скорости его перемещения, длины гибкой связи и т. д.
Устройство для буксировки тела работает следующим образом.
При буксировке тела 3 на гибкой связи 1 в нижней полуплоскости (на уровне Нприн) оно занимает равновесное положение в боковой плоскости за счет силы его веса, выполнения подвесной системы 4 в виде двух ветвей и наличия оперения 2. При переводе буксируемого тела 3 из нижней полуплоскости в верхнюю (на уровень Нпревыш), например, за счет изменения величины подъемной силы Y несущего крыла 7 буксируемого тела 3 сигнал датчика 5 угла атаки подвесной системы 4 подключается к входу переключателя 6, в частности, на вход операционного усилителя 15. При перемещении буксируемого тела 3 вертикально вверх и достижении угла атаки подвесной системы 4 αп.с ≈ 0 (равного ± 0,5-1о) напряжение датчика 5 поступает на вход операционного усилителя 15, а при угле атаки более ±1о благодаря наличию стабилитронов 19, 20 напряжение на вход операционного усилителя 15 не поступает. По выходному сигналу усилителя 15 срабатывает реле 14, подающее напряжение от источника питания на обмотку силового реле 17. Напряжение от источника питания блокируется через контакты реле Р17.1 на обмотку реле 17, а через другие контакты реле Р17.2 напряжение от источника питания 16 подается на обмотку 18 привода 10 средства стабилизации буксируемого тела в боковой плоскости. Привод 10 посредством тяг 11 перемещает законцовки 8 и 9 оперения 2, причем законцовка 9 после перемещения образует с оперением 2 Г-образную форму, а законцовка 8 образует продолжение оперения 2. При этом у буксируемого тела 3 повышается производная коэффициента момента крена по углу скольжения МХВ, что при отклонении буксируемого тела 3 в боковой плоскости после перевода и буксировки его в верхней полуплоскости приводит к отклонению буксируемого тела относительно точки подвеса гибкой связи 1 по углу крена и переориентации вектора подъемной силы Y в сторону равновесного положения.
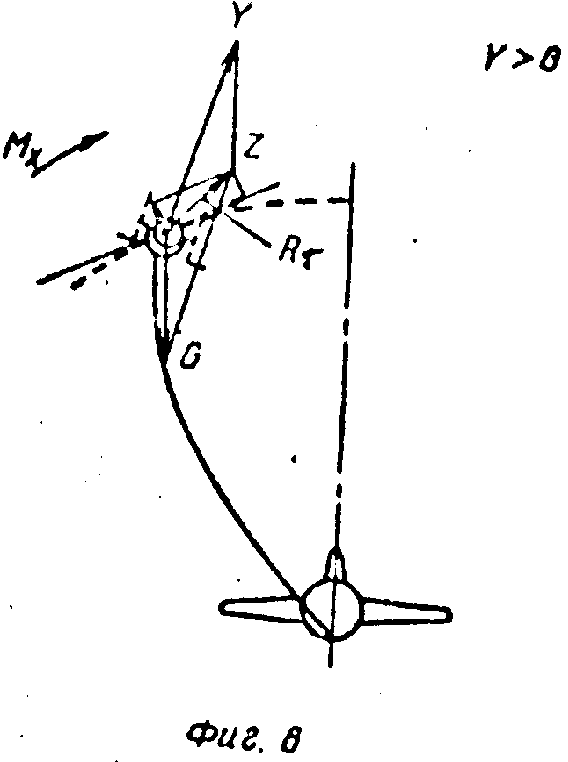
При переводе буксируемого тела из верхней полуплоскости в нижнюю привод 10 перемещает законцовку 8 в горизонтальное положение, а законцовку 9 - в вертикальное положение, соответствующее продолжению оперения 2, что при отклонении буксируемого тела от продольной плоскости приводит к моменту, поворачивающему вектор подъемной силы в сторону равновесного положения, и направленная по касательной к траектории буксируемого тела в поперечной плоскости компонента Rτ боковой силы Z, являющейся суммой подъемной силы Y и веса G, возвращает буксируемое тело 3 в исходное состояние. (56) Авторское свидетельство СССР N 1230094, кл. B 64 C 13/18, 1984.
| название | год | авторы | номер документа |
|---|---|---|---|
| Буксируемая система | 1988 |
|
SU1724513A1 |
| Устройство для буксировки тела | 1990 |
|
SU1707895A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ БУКСИРУЕМОГО ТЕЛА | 1992 |
|
RU2006429C1 |
| Буксируемая плоская система | 1989 |
|
SU1835372A1 |
| ПОДВОДНЫЙ БУКСИРУЕМЫЙ АППАРАТ | 1995 |
|
RU2096246C1 |
| Буксируемая плоская система | 1989 |
|
SU1835373A1 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВКИ ГИБКОЙ СИСТЕМЫ | 1989 |
|
SU1753669A1 |
| Устройство для буксировки и выпуска - уборки буксируемого тела | 1991 |
|
SU1749124A1 |
| БУКСИРУЕМОЕ ПОДВОДНОЕ УСТРОЙСТВО С ГОРИЗОНТАЛЬНОЙ СТАБИЛИЗАЦИЕЙ | 1999 |
|
RU2148003C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
Изобретение относится к авиационной технике, в частности к устройствам для буксировки тел. Цель изобретения - повышение безопасности при переводе буксируемого тела из верхней полуплоскости в нижнюю относительно буксировщика. Устройство снабжено механизмом стабилизации буксируемого тела 3 в виде поворотных законцовок 8 и 9, отклоняемых при переводе тела 3 из верхнего положения в нижнее так, что законцовки 8 и 9 попеременно занимают вертикальное и горизонтальное положение, что приводит всегда к ориентации вектора подъемной силы в равновесное положение. Отклонение законцовок происходит по сигналу с датчика 5 угла атаки подвесной системы, передаваемому через переключатель 6 на привод 10, связанный с законцовками 8 и 9. 1 з. п. ф-лы, 6 ил.