Изобретение относится к машиностроению и может быть использовано в автоматах и полуавтоматах для захвата, транспортирования и последующей укладки деталей, имеющих плоские поверхности с перфорацией или углублениями, а также как схвзт к манипуляторам и промышленным роботам.
Цель изобретения - повышение эксплуатационных характеристик путем сокращения времени срабатывания клапанов.
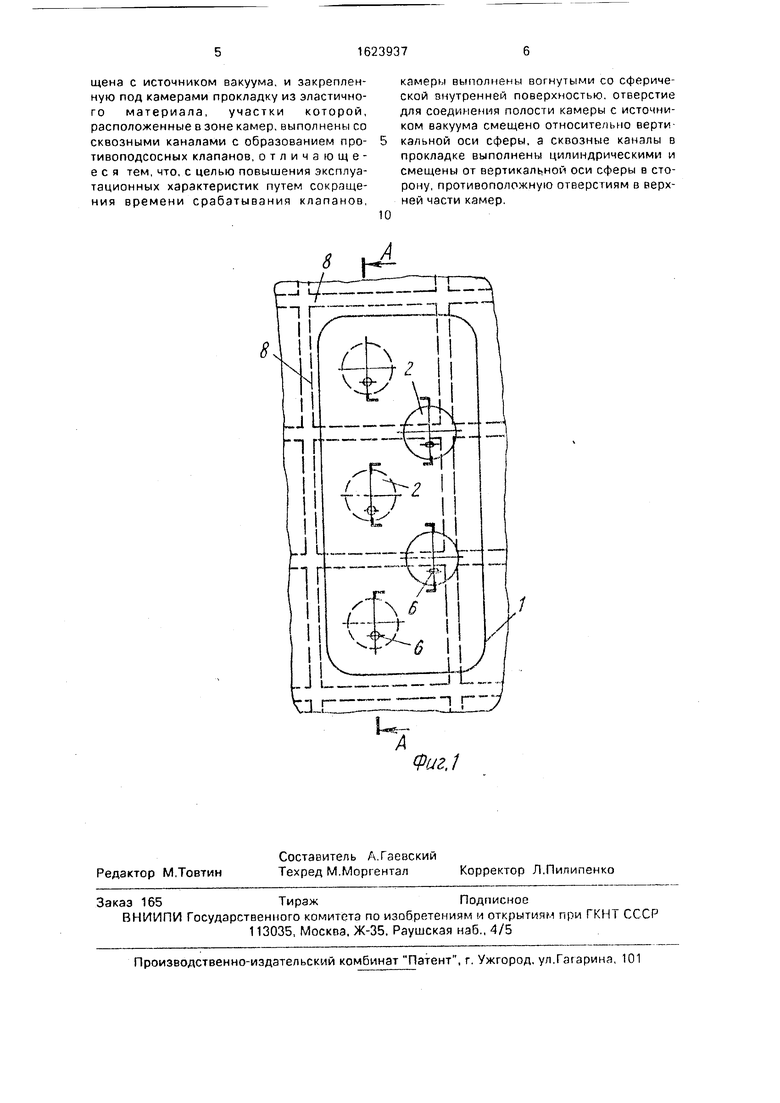
На фиг. 1 показана конструктивная схема устройства со стороны захватываемой детали; на фиг. 2 - сечение А-А на фиг. 1.
Устройство содержит выполненный из эластомерного материала корпус 1 с вакуумными камерами 2, сообщающимися вакуум-проводом 3 с источником вакуума (не показан). На корпусе со стороны захватываемой детали 4 закреплена гибкая прокладка 5, выполненная также из эластомера. В гибкой прокладке 5 напротив каждой вакуумной камеры 2 выполнены цилиндрические отверстия б, оси которых не совпадают с осями отверстий 7 вакуум-провода 3. Захватываемая деталь 4 может иметь плоскую или перфорированную поверхность, или плоскую поверхность с углублениями 8. Для обеспечения требуемой жесткости захвата корпус 1 закреплен на пластине 9.
Предлагаемый захват работает следующим образом.
Захват опускают на поверхность детали 4 до их соприкосновения. Из вакуумных камер 2 откачивают воздух через отверстия 7 и вакуум-провод 3. В тех вакуумных камерах, которые располагаются на гладкой поверхности детали 4 без углублений 8 (например, средняя и крайние камеры на фиг. 2), образуется разрежение. Поэтому под действием атмосферного давления захват прижимается к поверхности транспор- тируемой детали, которая затем переносится к месту обработки или штабелевки.
При этом в тех вакуумных камерах 2, которые попадают на место поверхности детали 4, имеющее углубление 8 (например, вторая и четвертая камеры сверху на фиг. 2),
разряжение не образуется. В этих камерах. в результате подсоса воздуха через углубления 8, на прокладку 5 со стороны захватываемой детали 4 действует атмосферное
давление, а с противоположной стороны - разрежение. Так как отверстия б выполняются с малым проходным сечением (диаметром порядка миллиметра), способным пропускать незначительные объемы яоздуха, то на них образуется перепад давления, который изгибает прокладку 5 в сторону меньшего давления, т е. в сторону вакуумной камеры 2, прижимая ее к стенкам вакуумной камеры 2. В результате отверстия 6 и
7 разъединяются между собой, приводя к самоустранению подсоса воздуха через указанные вакуумные камеры 2, находящиеся на выемках 8 поверхности детали, обуславливая тем самым самогерметизацию всего
захвата в целом.
В вакуумных камерах 2, в которых нет подсоса воздуха через углубления 8 (крайние и средняя камеры на фиг 2). имеются только поверхностные утечки между прокладкой 5 и гладкой поверхностью детали 4. Объем воздуха, определяемый данными утечками, много меньше обьема воздуха, подсасываемого через углубления 8. Поэтому обьем поверхностных утечек воздуха
свободно протекает через отверстия б, не приводя к образованию разности давлений на отверстиях, 6 и не вызывая прогиба прокладки 5 в соответствующих вакуумных камерах 2.
Для дальнейшего увеличения надежности захватывания деталей необходимо увеличивать количество вакуумных камер 2 и одновременно уменьшать их плищади касания с деталью, причем так, чтобы площадь
касания вакуумных камер с поверхностью детали не превышала площади гладкой (не имеющей углублений, перфорации и выемок) поверхности детали.
Формула изобретения
Вакуумное захватное устройство, содержащее корпус с выполненными в его нижней плоской части камерами, верхняя часть которых посредством отверстий сообщена с источником вакуума, и закрепленную под камерами прокладку из эластичного материала, участки которой, расположенные в зоне камер, выполнены со сквозными каналами с образованием про- тивоподсосных клапанов, отличающееся тем, что, с целью повышения эксплуатационных характеристик путем сокращения времени срабатывания клапанов,
камеры выполнены вогнутыми со сферической внутренней поверхностью, отверстие для соединения полости камеры с источником вакуума смещено относительно вертикальной оси сферы, а сквозные каналы в прокладке выполнены цилиндрическими и смещены от вертикальной оси сферы в сторону, противоположную отверстиям в верхней части камер.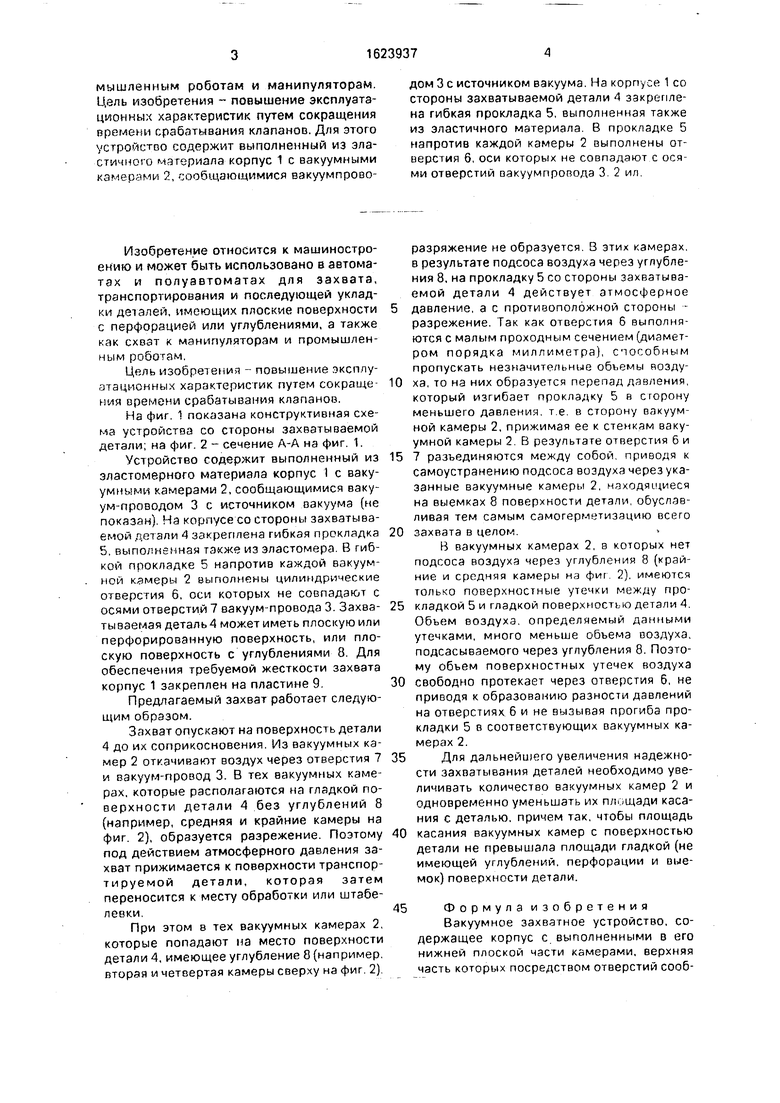
| название | год | авторы | номер документа |
|---|---|---|---|
| ВАКУУМНЫЙ ЗАХВАТ | 1990 |
|
RU2043193C1 |
| Схват манипулятора | 1985 |
|
SU1585149A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ЛИСТОВЫХ ДЕТАЛЕЙ | 2014 |
|
RU2573366C1 |
| Вакуумный захват | 1978 |
|
SU738980A1 |
| Вакуумный схват для листовых деталей | 1982 |
|
SU1030293A1 |
| ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 2000 |
|
RU2179504C1 |
| Вакуумное захватное устройство | 1981 |
|
SU1036657A1 |
| ПЛИТА ДОРОЖНОГО ПОКРЫТИЯ, СПОСОБ ЕЕ УКЛАДКИ И КАМЕРА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2004 |
|
RU2278919C1 |
| Вакуумное захватное устройство | 1989 |
|
SU1723003A1 |
| Устройство для захвата, транспортирования и укладки плоских деталей в стопу | 1989 |
|
SU1712284A1 |
Изобретение относится к машиностроению и может быть использовано в автоматах и полуавтоматах для захвата, транспортирования и последующей укладки деталей, имеющих плоские поверхности с перфорацией или углублениями, а также как схват к про
| Вакуумное захватное устойство | 1986 |
|
SU1533979A1 |
| кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
