со
с
k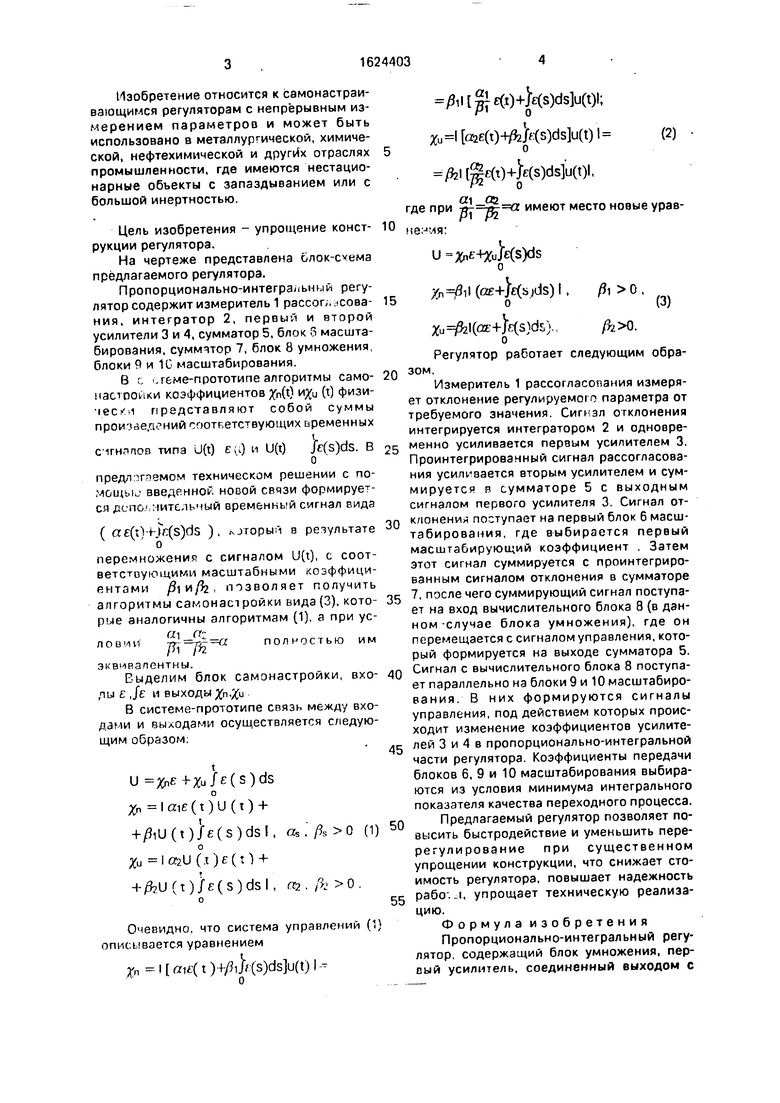
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1386957A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1511734A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1126926A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Самонастраивающаяся система управления с эталонной моделью | 1980 |
|
SU877471A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
Изобретение относится к самонастраивающимся регуляторам с непрерывным измерением параметров, например к пропорционально-интегральным регуляторам, и может быть использовано в металлургической, химической, нефтехимической и других отраслях промышленности, где имеются нестационарные объекты с запаздыванием или большой инертностью. Цель изобретения - упрощение конструкции. Введение трех блоков масштабирования 6, 9, 10, второго сумматора 7 позволило отказаться от одного из вычислительных блоков и упростить конструкцию. 1 ил.
о
CJ
Изобретение относится к самонастраивающимся регуляторам с непрерывным измерением параметров и может быть использовано в металлургической, химической, нефтехимической и других отраслях промышленности, где имеются нестационарные объекты с запаздыванием или с большой инертностью.
Цель изобретения - упрощение конструкции регулятора.
На чертеже представлена олок-с ема предлагаемого регулятора.
Пропорционально-интегральный регулятор содержит измеритель 1 рэссог,.,«сования, интегратор 2, первый и второй усилители 3 и 4, сумматор 5, блок S масштабирования, суммтгор 7, блок 8 умножения, блоки 9 и 1C масштабирования.
В с. 1,геме-прототипе алгоритмы самокат ооики коэффициентов #n(t) и#и (t) физи- чессч представляют собой суммы произведений соответствующих временных
счгнппов типа U(t) eu) и U(t) Je(s)ds. В
О
предлагаемом техническом решении с ло- мощьк.- введенной новой связи формирует- ся дспс иительчый временный сигнал вида
( ae(:)-t-jr(s)ds ), лорый в результате
о
перемножения с сигналом U(t), с соответствующими масштабными коэффициентами , позволяет получить алгоритмы самонастройки вида (3), которые аналогичны алгоритмам (1), а при уело в и и
(Ц Cti
ft-fi-
полиостью им
эквивалентны.
Выделим блок самонастройки, вхоЛЫ Ј ,/Ј И ВЫХОДЫ Јn,#j
В системе-прототипе связь между входами и вьиодами осуществляется следующим образом,
U e+Xu/Ј(s)ds
#, I aie (t ) U (t) +
+ 0iU(t)/e(s)dsl, as, (1)
(.t)E(O +
+ (t)}e(s)dsl, па. # 0.
о
Очевидно, что система управлений (1) описывается уравнением
(s)(t)(t))(t)l;
(t)(s)(t)l о
)+ks)(t)l,
10
где при а. имеют место новыеуравнения:
U E+frJe(s)ds
о
, г; Xh # I (ое+jeMs) I,
13о
(oE+)c(s)ds},
Регулятор работает следующим образом.
Измеритель 1 рассогласопания измеряет отклонение регулируемою параметра от требуемого значения. Сигнал отклонения интегрируется интегратором 2 и одновременно усиливается первым усилителем 3. Проинтегрированный сигнал рассогласования усиливается вторым усилителем и суммируется в сумматоре 5 с выходным сигналом первого усилителя 3. Сигнал отклонений поступает на первый блок 6 масштабирования, где выбирается первый масштабирующий коэффициент . Затем этот сигнал суммируется с проинтегрированным сигналом отклонения в сумматоре
. после чего суммирующий сигнал поступает на вход вычислительного блока 8 (в данном -случае блока умножения), где он перемещается с сигналом управления, который формируется на выходе сумматора 5.
Сигнал с вычислительного блока 8 поступает параллельно на блоки 9 и 10 масштабирования. В них формируются сигналы управления, под действием которых происходит изменение коэффициентов усилителей 3 и 4 в пропорционально-интегральной части регулятора. Коэффициенты передачи блоков 6. 9 и 10 масштабирования выбираются из условия минимума интегрального показателя качества переходного процесса.
Предлагаемый регулятор позволяет повысить быстродействие и уменьшить перерегулирование при существенном упрощении конструкции, что снижает стоимость регулятора, повышает надежность
рабо.-I, упрощает техническую реализацию.
Формула изобретения Пропорционально-интегральный регулятор, содержащий блок умножения, первый усилитель, соединенный выходом с
первым входом первого усилителя, и после-штабирования соединен с первым входом
довательно соединенные измеритель рас-второго сумматора, второй вход которого
согласования, интегратор и второйподключен к выходу интегратора, выход втоусилитель, выход которого подключен к вто-рого сумматора соединен с первым входом
ромувходу первого сумматора, вход устрой-5 блока умножения, выход которого соответства является входом измерителяственно через третий и четвертый блоки
рассогласования, выход которого соединенмасштабирования соединен с входами упс входом первого усилителя, отличающий-равления коэффициентом усиления первого
с я тем, что, с целью упрощения регулятора,и второго усилителей, второй вход блока
в него введены три блока масштабирования10 умножения соединен с выходом первого
и второй сумматор, причем выход измерите-сумматора, выход которого является выхоля рассогласования через первый блок мае-дом устройства.
| Райбман Н.С | |||
| Что такое идентикация М.: Наука, 1970, с | |||
| Приспособление для записи звуковых явлений на светочувствительной поверхности | 1919 |
|
SU101A1 |
| Пропорционально-интегральный регулятор | 1979 |
|
SU798707A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
