Изобретение относится к машиностроению, а именно к промышленным роботам, предназначенным для автоматизации тяжелых и монотонных работ, а также для работ в опасных и труднодоступных зонах.
Цель изобретения - расширение функциональных возможностей за счет обеспечения передачи крутяш,его момента от двигателей механизмов перемеш,ения ромбического звена захватному органу, сообщая ему.возможность поворота и зажима объе г...,. ;
Передача крутяш.ёго момента от звена JJ захвату повышае|г .грузоподъемность ма,)1апулятора за счет; |1СТ1ользования облегченнога захвата без собственных двигателей. Кроме, того, повышает ся безопасность работ при аварийном отключении питания за счет перехода вертикального звена в режим блокировки. При этом последнее звено сохраняет свое положение и осуществляет удержание детали в захвате за счет передачи крутящего момента на захват, возникающего под действием собственного веса звена и захвата с деталью.
На фиг. изображен предлагаемый манипулятор, общий вид; на фиг. 2 - структурная схема кисти; на фиг. 3 - кинематическая схема механизма передачи движения, соответствующая режиму сжатия вертикального звена; на фиг. 4 - вид по стрелке А на фиг. 3; на фиг. 5 - кинематическая схема механизма передачи движения, соответствующая режиму растяжения вертикального звена; на фиг. 6 - вид по стрелке Б на фиг. 5; на фиг. 7 - кинематическая схема механизма передачи движения, соответствующая режиму ориентирования захватного устройства; на фиг. 8 - вид по стрелке В на фиг. 7; на фиг. 9 - захватное устройство.
Манипулятор включает блок 1 управления, опорные и несущие ромбические звенья 2, соединенные между собой и с захватными устройствами 3, причем каждое ромбическое звено 2 состоит из четырех модулей 4 и соединяющих их попарно щарниров 5. Каждый из модулей 4 состоит из полого элемента, в полости которого расположен механизм его перемещения, включающий два идентичных привода вращения, а их выходные валы установлены соосно осям щарниров, соединяющих смежные полые элементы. Механизм 6 передачи движения размещен внутри оси шарнира, выполненного в виде корпуса 7. На цапфе корпуса 7 установлена соосно входному валу 8 шарнира 5 одного модуля 4 первая электромагнитная муфта 9. Механизм передачи движений выполнен в виде двух пар конических передач, зубчатое колесо 10 одной из которых сварено с первым входным валом 8, а второе зубчатое колесо 11 этой пары установлено на первом выходном валу 12 и связано с внутренним кольцом 13 захватного устройства 3, зубчатое колесо 14 второй пары
связано со вторым входным валом 15 шар нира 5 другого модуля 4, а второе зубчатое колесо 16 пары установлено на втором выходном валу 17, расположенным соосно первому выходному валу 12, и связано с внешним кольцом 18 захватного устройства 3, причем внутри корпуса 7 соосно первому выходному валу 12 установлена вторая электромагнитная муфта 19, а на другой стороне (внутри корпуса 7) соосно
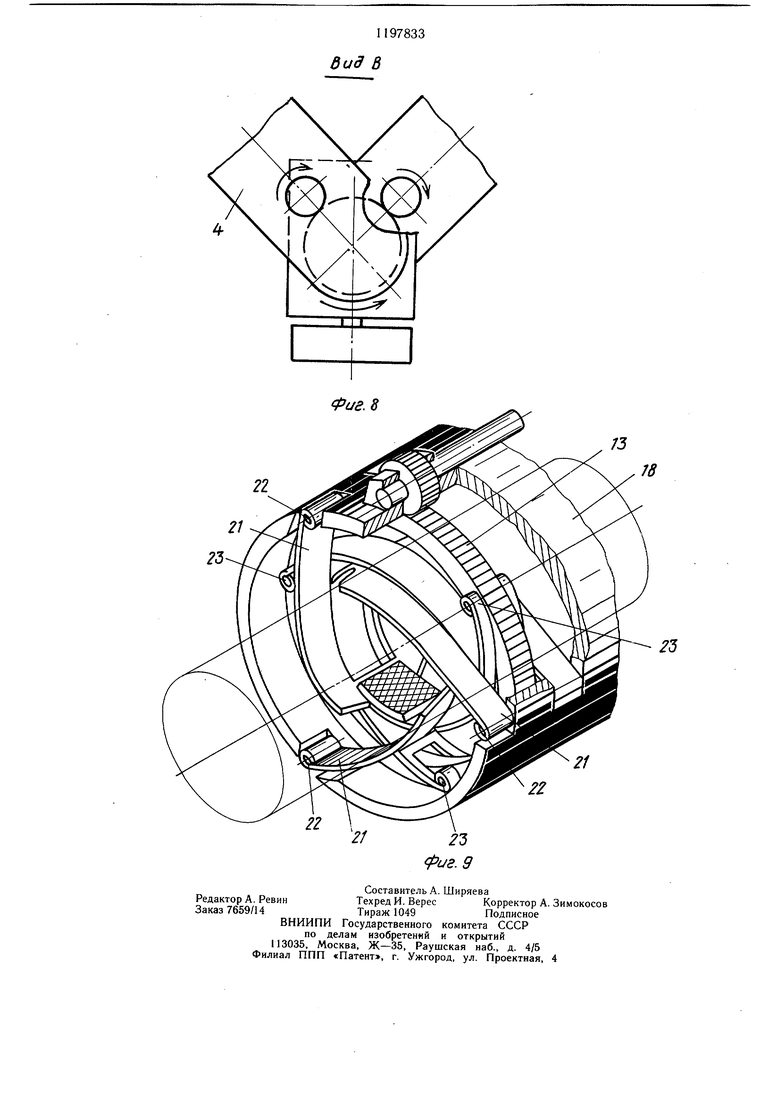
второму выходному валу 17 установлена третья электромагнитная муфта 20. Кольцо 13 захватного устройства 3 установлено между раздвоенными концами зажимных губок 21, которые имеют Y-образную форму и закреплены к внешнему кольцу 18 с помощью
осей 22. Противоположные концы зажимных губок 21 закреплены с помощью осей 23. Манипулятор работает следующим образом.
При работе манипулятора ромбические
Q звенья 2 преобразуют угловые движения модулей 4 в продольное или боковое перемещение звеньев и круговое вращение свободных шарниров 5. Горизонтальное ромбическое звено 2, соединенное с помощью шарниров 5 с опорными звеньями 2 - тележками, при вращении шарниров 5 поворачивается относительно тележек (фиг. 1).
Через механизм 6 передачи движения (фиг. 2) при подаче соответствующего напряжения от блока 1 управления на нормально закрытую муфту 9 и нормально
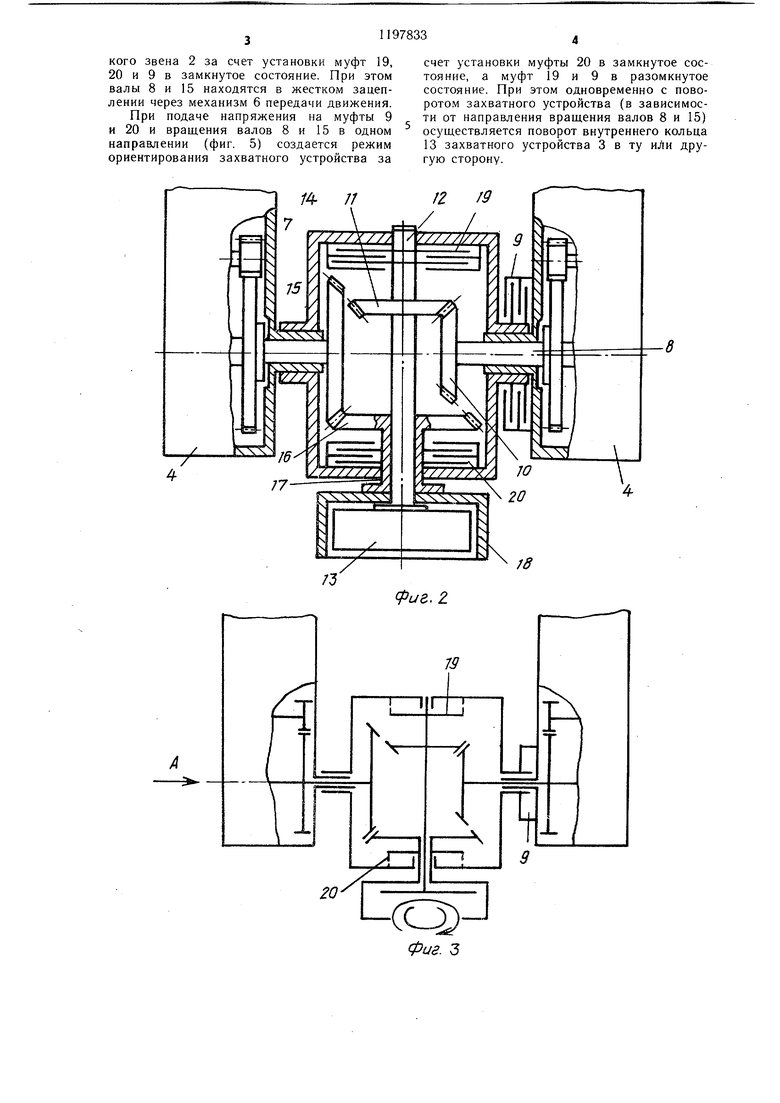
0 открытые муфты 19 и 20 происходит передача крутящего момента от двигателей модулей 4 звена на захватное устройство 3. При отсутствии напряжения на муфтах 9, 19 и 20 создается щтатный режим сжатия вертикального ромбического звена 2
5 за счет установки муфты 9 в замкнутое состояние, а муфт 19 и 20 в разомкнутое состояние (фиг. 3). Крутящий момент от пары нижних модулей 4 вертикального ромбического звена 2 создается на валах 8 и 15,
Q жестко связанных между собой через зубчатые колеса 10 и 11 и 14 и 16, за счет полного раскрытия или сжатия губок захватного устройства 3 до упора. При этом вращение валов 8 и 15 от соответствующих модулей встречное.
5
При вращении валов 8 и 15 в одном направлении осуществляется режим поворота детали за счет одновременного вращения внутреннего 13 и внешнего 18 колец захватного устройства 3. В обесточенном состоя НИИ вертикального ромбического звена 2 реализуется режим блокировки детали в захватном устройстве 3 путем встречного вращения валов 8 и 15, создаваемого за счет потенциальной энергии вертикального ромбического звена 2 при его растяжении под действием собственного веса.
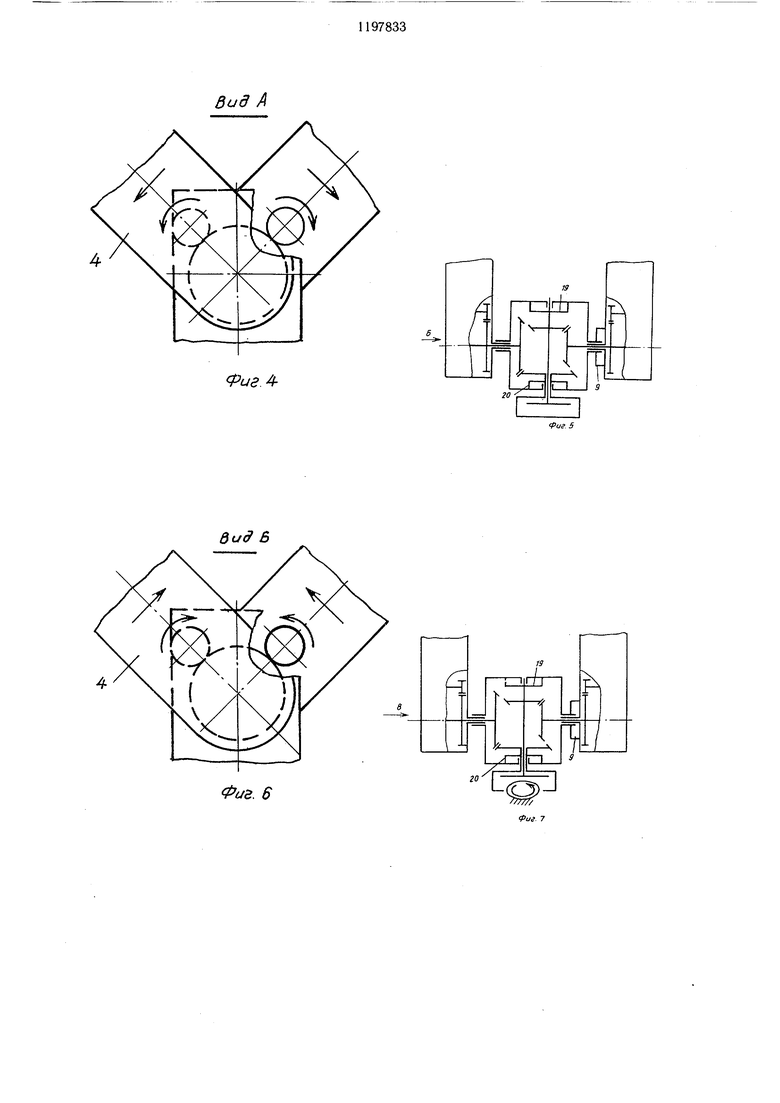
При подаче напряжения на муфты 19 и 20 от блока 1 (фиг. 4) создается штатный режим растяжения вертикального ромбического звена 2 за счет установки муфт 19, 20 и 9 в замкнутое состояние. При этом валы 8 и 15 находятся в жестком зацеплении через механизм 6 передачи движения. При подаче напряжения на муфты 9 и 20 и вращения валов 8 и 15 в одном направлении (фиг. 5) создается режим ориентирования захватного устройства за
счет установки муфты 20 в замкнутое состояние, а муфт 19 и 9 в разомкнутое состояние. При этом одновременно с поворотом захватного устройства (в зависимости от направления вращения валов 8 и 15) осуществляется поворот внутреннего кольца 13 захватного устройства 3 в ту или другую сторону.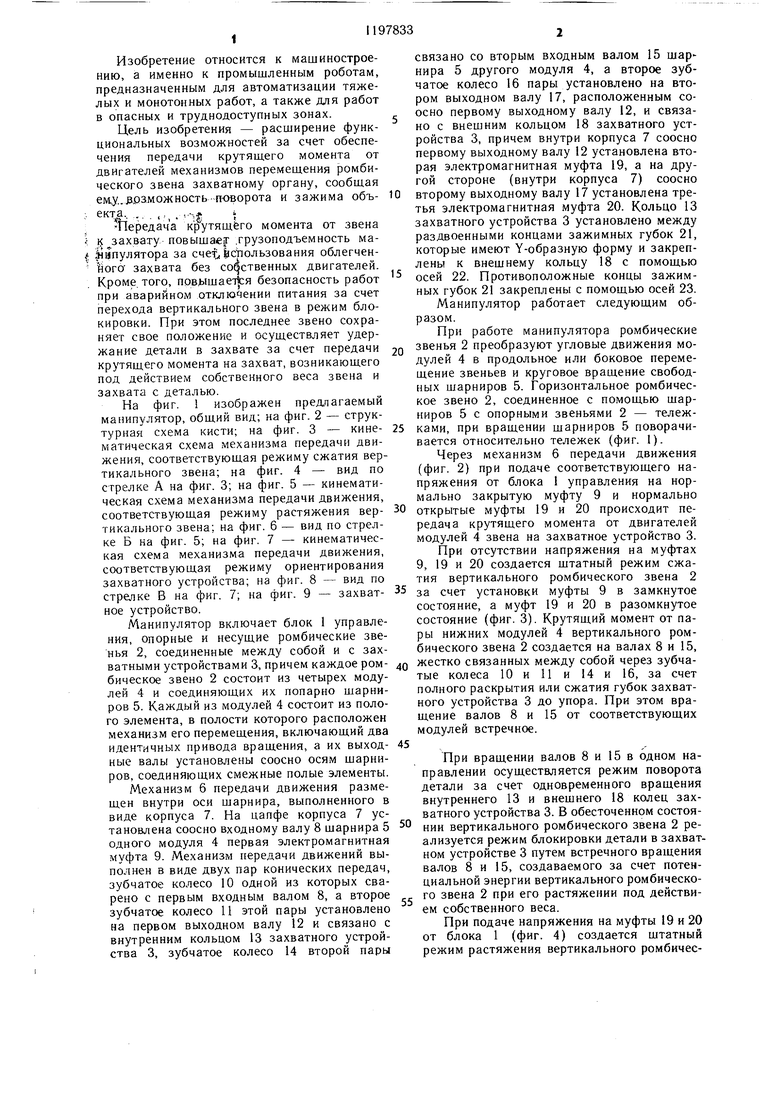
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1988 |
|
SU1548035A1 |
| Дифференциальный манипулятор | 1983 |
|
SU1119838A1 |
| Манипулятор | 1986 |
|
SU1393620A1 |
| Манипулятор | 1988 |
|
SU1627400A1 |
| Дифференциальный манипулятор | 1983 |
|
SU1110625A1 |
| Манипулятор | 1987 |
|
SU1430258A1 |
| Захватное устройство | 1986 |
|
SU1421530A1 |
| Манипулятор для передачи изделий | 2023 |
|
RU2822908C1 |
| Шарнир манипулятора | 1982 |
|
SU1057274A1 |
| Модуль манипулятора | 1980 |
|
SU984859A1 |
МАНИПУЛЯТОР, содержащий шарнирно соединенные ромбические звенья, каждое из которых состоит из четырех шарнирно соединенных полых элементов, в полости которых расположены механизмы их перемещения, каждый включающий два идентичных привода вращения, а их выходные валы установлены соосно осям щарниров соединения смежных полых элементов и захватное устройство, отличающийся тем, что, с целью расщирения функциональных возможностей за счет обеспечения возможности ориентирующих перемещений захватного устройства и зажима детали от приводов ромбических звеньев, он снабжен двумя коническими передачами и тремя электромагнитными муфтами, а ось шарнира двух смежных полых элементов выполнена в виде полого корпуса, в полости которого установлены конические передачи, при этом ведущие зубчатые колеса каждой конической передачи жестко связаны соответственно с выходными валами смежных полых элементов ромбических звеньев, а ведомые зубчатые колеса этих передач установлены на дополнительных соосных валах, связанных с захватным устройством, причем первая электромагнитная муфта установлена с возможностью соединения корпуса оси шарнира с одним из смежных полых элементов ромбического звена, а вторая и третья Q электромагнитные муфты установлены с воз- S можностью соединения каждого из дополнит тельных соосных валов с корпусом оси это го шарнира. СО 00 СО со
/3
(иг. Z
Вид А
Фиг
| Манипулятор | 1982 |
|
SU1013259A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
