Изобретение относится к ,) пыпм- нальнь, учлам радиотлг ктроптюп аппаратуры и может РЫГЬ нстоП торано в регуляторах ДВИАКОШП о тина f jv III.IM управлением.
Целью изобретения яв тяг гея ппньппе- ние эффективности .чю гва, ят счет облегчения точной установки укачате- ля относительно рисок шкалп.
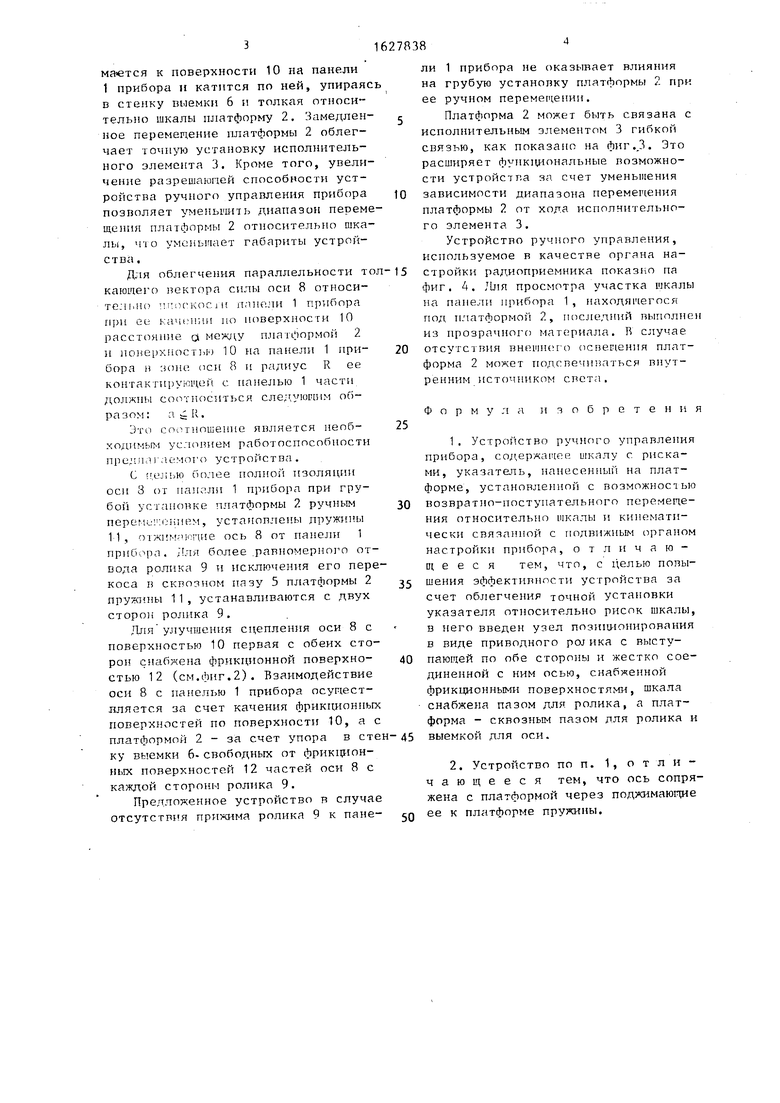
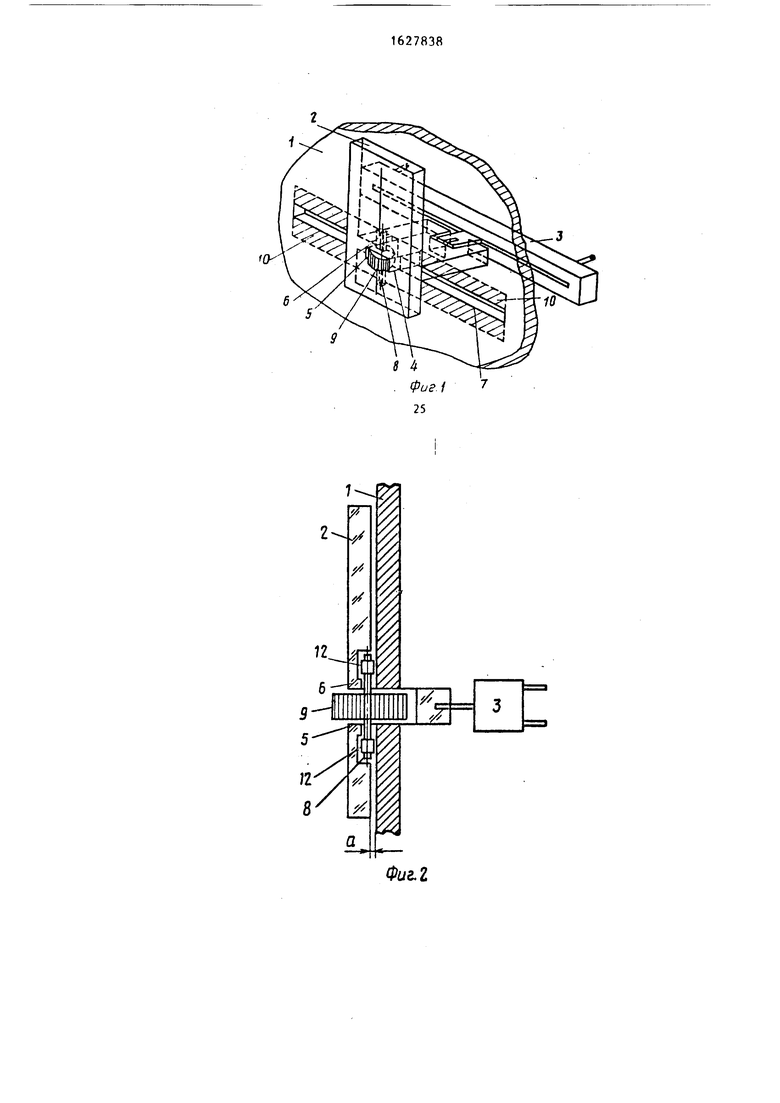
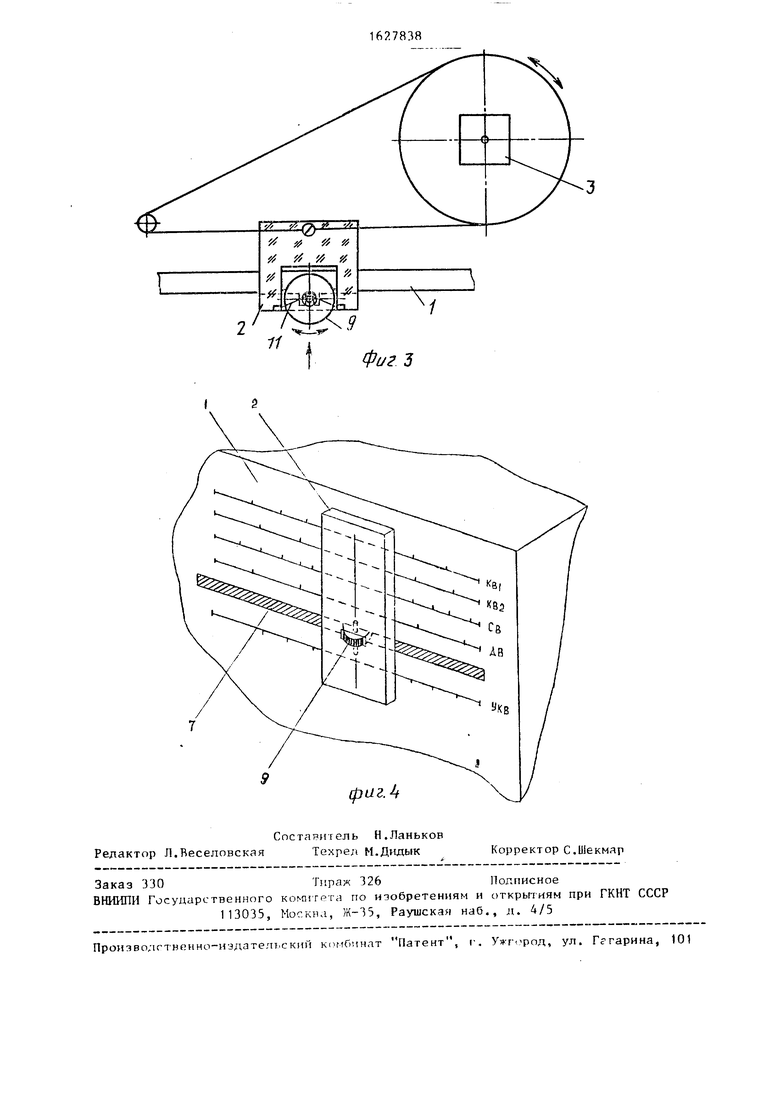
На фиг. 1 ичобралсно устройство, обпгяй вид, на Лгг. 2 - сечение устройств поперек линии перемещения платформы относительно шкалы; на фиг . 3 - то же,сечение по линии перемещения платформы отнесите --ьно пкалы , на фиг. 4 - то ле, внешний пил,.
Устройство содержит расположенную на панели 1 прибора, например радиоприемника, платформу 2, которая связана с исполнительным элементом 3, например ползунковым резистором, платформа 2 снабжена пазами 4, одна часть которого - паз 5 выполнена
сквозной, a ;ipyi я .01Ь - м, ,, 6 - на часть TOirmiii o i i4i со стороны n.iHOjiii 1. Напротив с иозпо.п паза 5 в панели 1 рпшмнен im 7. В выемке 6 станов юна осч 8, с KIUOрОЙ АеСТКО COOjlHllPI НрНВОГНОИ РОЛИК
9, распо IOAPHHI in с ТЮТНОАНОС i j и прошения в склочном па w 5 и па л 7 панели 1 прибора одновременно. Позицией 10 на мортелс опозн,чгна погнрч- ность naiiejiii 1 прибора.
УсгройС гво paooi 1ет спегг- пцпм оПразом.
Ручным прррмегимпн ч иг-ч(1|прмм 2 относительно шкалы панели 1 прибора осугцсс i вляется i рубая установка исполнительного -элемента . При атом приводили ролик ( не препятствует перем р(ению платформы относительно шкалы. П)и прилап и пгп- водного ролика 9 патьцем к панель 1 прибора, как показано стрелкой на фиг.З, и его вращении ось Я щ Н-АНС
,-.ч.А
ск ьо м
оо
СЛ 00
-,4.
мается к поверхности 10 на панели 1 прибора н катится по ней, упираяс в стенку выемки 6 н толкая относительно шкалы платформу 2. Замедлен- ное перемещение платформы 2 облегчает 1 очную установку исполнительного элемента 3. Кроме того, увеличение разрешаюцей способности устройства ручного управления прибора позволяет уменьшить диапазон перемещения платформы 2 относительно шкалы, то уменьшает габариты устройства ,
Для облегчения параллельности то каютего вектора силы оси 8 относительно I lrKoriii панели 1 прибора при ei- ьаченпн по поверхности 10 расстояние Q между пла:формой 2 и поверхностью 10 на панели 1 при- бора н зоне оси 8 и радиус R ее контактирующей с панелью 1 части должны соотноситься следующим образом : а R.
Это соотношение является необ- ходимым условием работоспособности предпл аемого устройства.
С елью более полной изоляции оси 8 от панели 1 прибора при грубой ускшовке платформы 2 ручным перс-ме (лшрм, установлены пружины 11, О1жнм-ч щие ось 8 от панели 1 прибора. Длл более равномерного отвода ролика 9 и исключения его перекоса в сквозном пазу 5 платформы 2 пружины 11, устанавливаются с двух сторон ролика 9.
Для улучшения сцепления оси 8 с поверхностью 10 первая с обеих сторон снабжена фрикционной поверхно- стью 12 (см.фиг.2). Взаимодействие оси 8 с панелью 1 прибора осуществляется за счет качения фрикционных поверхностей по поверхности 10, ас платформой 2 - за счет упора в сте ку выемки 6- свободных от фрикционных поверхностей 12 частей оси 8 с каждой стороны ролика 9.
Предложенное устройство в случае отсутствия прижима ролика 9 к пане-
ли 1 прибора не оказывает влияния на грубую установку платформы 2 при ее ручном перемещении.
Платформа 2 может быть связана с исполнительным элементом 3 гибкой связью, как показано на фиг..З. Это расширяет функциональные возможности устройства за счет уменьшения зависимости диапазона перемещения платформы 2 от хода исполнительного элемента 3.
Устройство ручного управления, используемое в качестве органа настройки радиоприемника показь.о па фиг. 4. Для просмотра участка шкалы на панели прибора 1, находящегося под платформой 2, последний выполне из прозрачного материала. R случае отсутствия внешнего освещения платформа 2 может подсвечиваться внутренним источником спета.
Формула изобретени
1 . Устройство ручного управления прибора, содержащее шкалу г рисками, указатель, нанесенный на платформе, установленной с возможностью возвратно-поступательного перемещения относительно шкалы и кинематически связанной с подвижным органом настройки прибора, отличающееся тем, что, с целью повышения эффективности устройства за счет облегчения точной установки указателя относительно рисок шкалы, в него введен узел позиционирования в виде приводного poj ика с выступающей по обе стороны и жестко соединенной с ним осью, снабженной фрикционными поверхностями, шкала снабжена пазом для ролика, а платформа - сквозным пазом для ролика и выемкой для оси.
2. Устройство по п. 1, отличающееся тем, что ось сопряжена с платформой через поджимающие ее к платформе пружины.
Фиг 3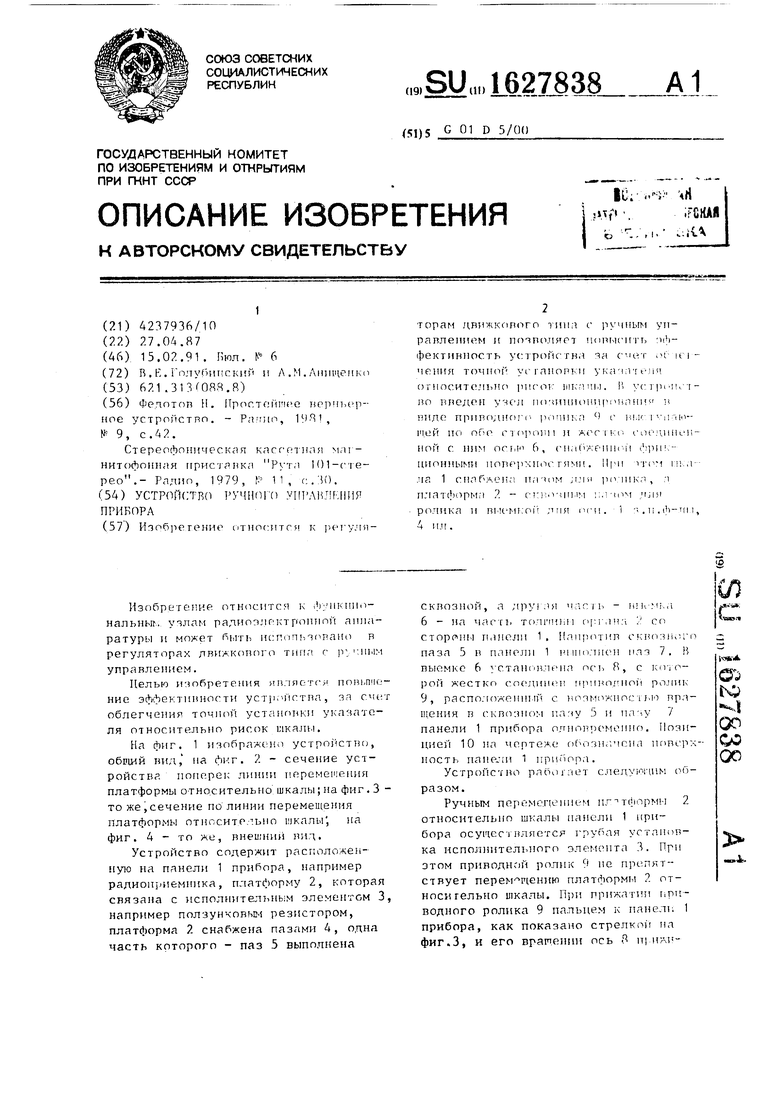
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическое загрузочное устройство | 1984 |
|
SU1220783A1 |
| Устройство для автоматической сборки узлов | 1982 |
|
SU1134340A1 |
| УСТРОЙСТВО ДЛЯ ТОЧНОГО ПОЗИЦИОНИРОВАНИЯ НА ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ РОТОРА | 2013 |
|
RU2543884C2 |
| Автомат для изготовления и маркировки трубчатых монтажных бирок | 1985 |
|
SU1279858A1 |
| РУЧНОЙ ПРИБОР ДЛЯ УХОДА ЗА ВОЛОСАМИ | 2017 |
|
RU2703852C1 |
| Устройство для градуировки шкал генераторов сигналов | 1982 |
|
SU1080016A1 |
| БЫТОВАЯ ШВЕЙНАЯ МАШИНА | 1996 |
|
RU2091526C1 |
| Способ зачистки осевых каналов роторов турбин и устройство для его осуществления | 1990 |
|
SU1784448A1 |
| Вертикально-замкнутый тележечный конвейер | 1975 |
|
SU602432A1 |
| Верньерное устройство | 1945 |
|
SU66853A1 |
Изобре генио о i носите я к poi лягорам движкового с ручным vn- равлением и позволяет повымпь иЬ- фективность устройства за с-ч-г .ч к i - чения точит 1 vi i anopi и , ка i irt i ОПЮСИТеЧЬНО рПГО 1ИКМЦ. I V( iplli. Г- ПО ВВедеН ЗеЛ ПОЧИНИОНИрОНаНН Ч риде приводно1 с piirim a () i- i ii n ii ii.i-- пей по о Г1 о пороли и f-cc i i i i н uuu iiНОЙ Г llin ОГМ 1 fl , CIl.lO; f Mill II ilpll ИИПНИЫМИ noBepMiot гямн. in1 п а ча 1 n,i юм дчя шь i , i плат(Ьорм) ,|1пм юм чдч рочика и BiH Mioi имя or и. i . ь . i i- м i, 4 ип.
фиг.Ь
| Федотов И | |||
| Простеипее верчъер- ное устройство | |||
| - Ра чт, 1ЧЯ1, № 9, с.4 | |||
| Приспособление для записи звуковых явлений на светочувствительной поверхности | 1919 |
|
SU101A1 |
