Изобретение относится к станкостроению, в частности к станкам с устройством автоматической смены инструмента для перенесения инструмента из магазина в шпиндель и обратно при их расположении во взаимно перпендикулярных плоскостях.
Цель изобретения - повышение продолжительности за счет сокращения времени смены инструментов.
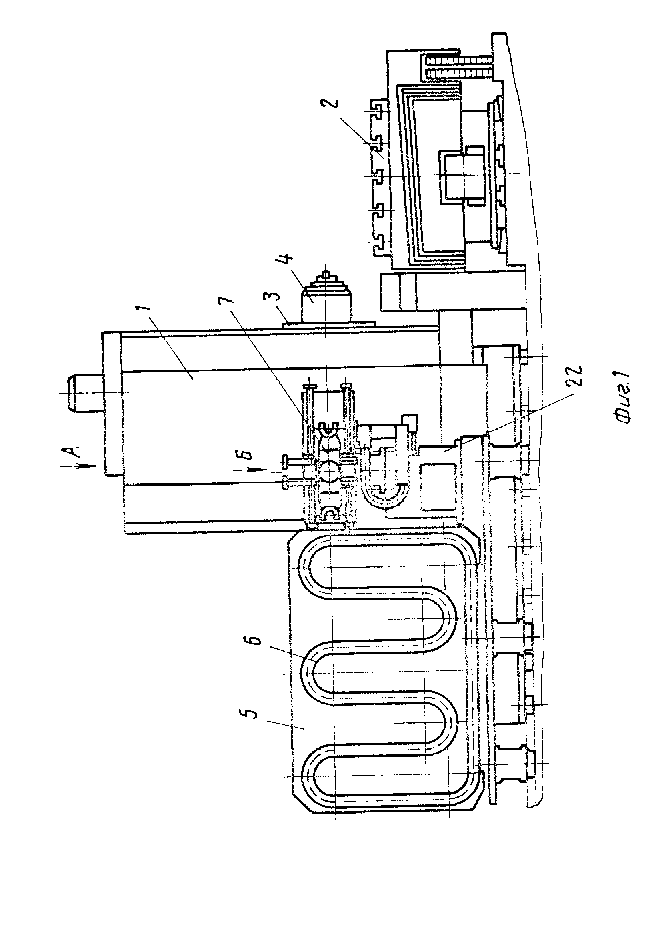
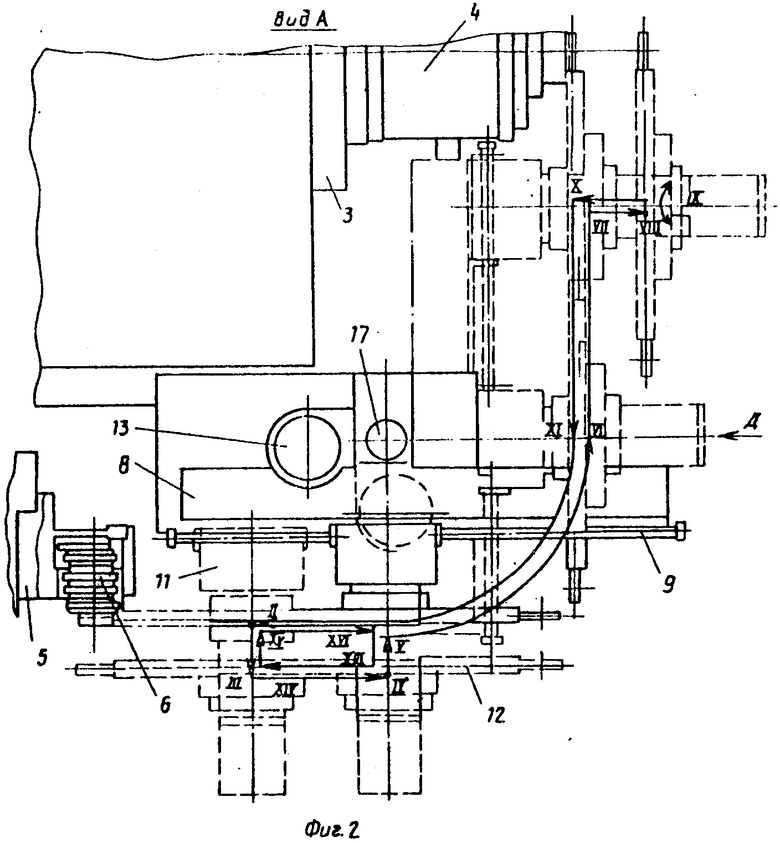
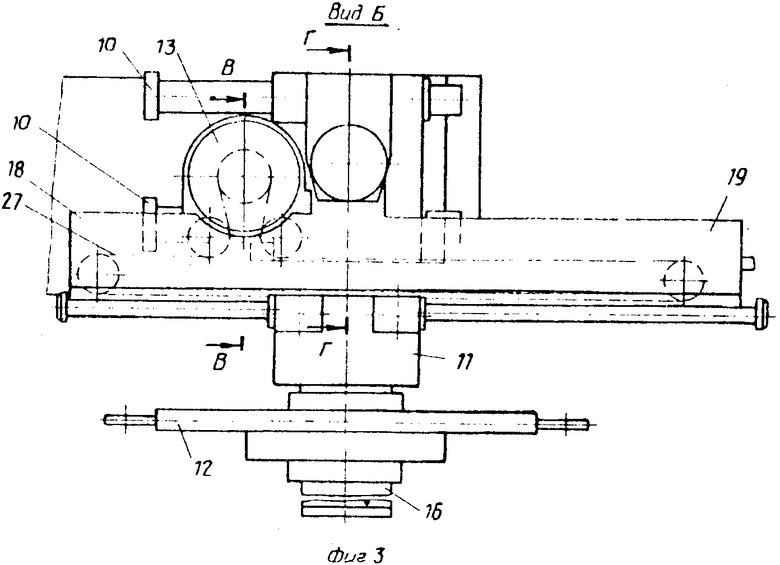
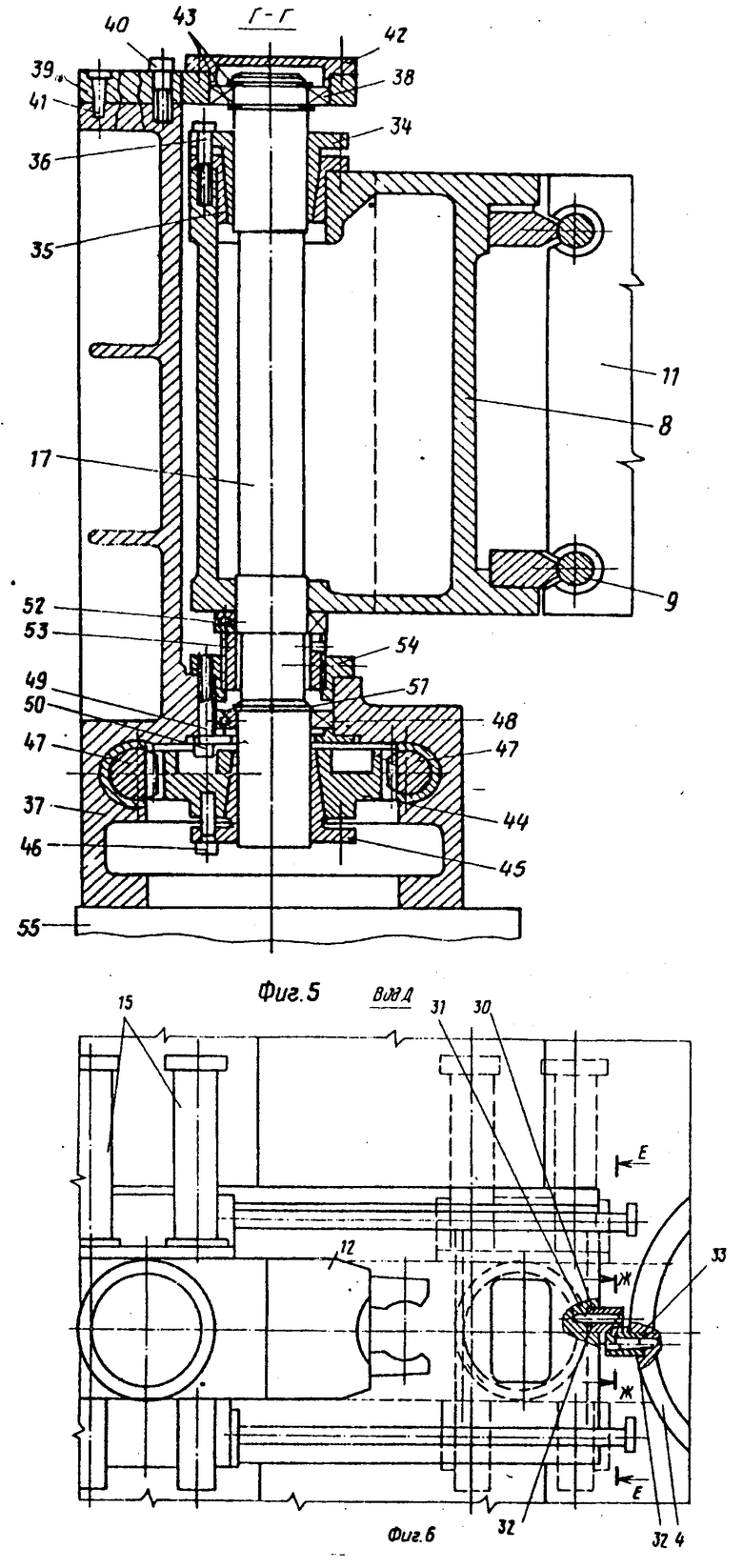
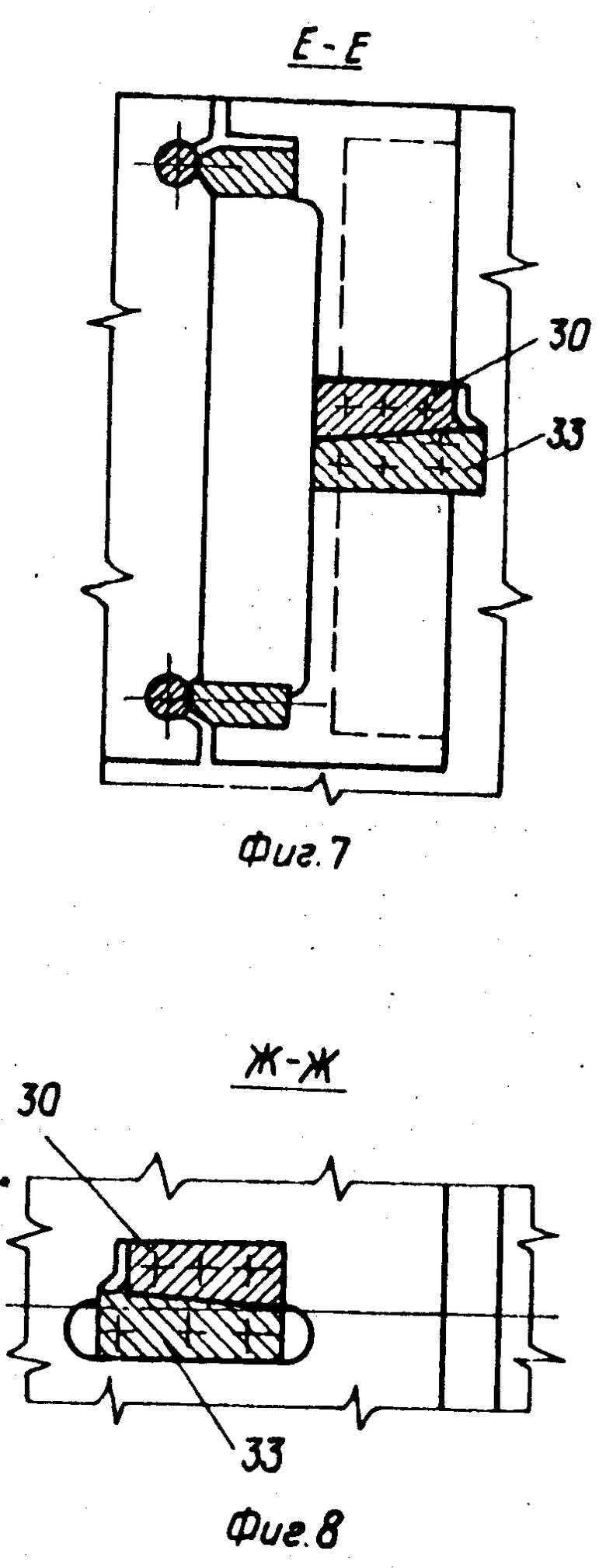
На фиг. 1 изображен станок, общий вид; на фиг. 2 дан вид по стрелке А на фиг. 1; на фиг. 3 - вид по стрелке Б на фиг. 1; на фиг. 4 - сечение В-В на фиг. 3 (привод перемещения каретки); на фиг. 5 - сечение Г-Г на фиг. 3 (механизм поворота траверсы); на фиг. 6 - вид по стрелке Д на фиг. 2; на фиг. 7 - сечение Е-Е на фиг. 6; на фиг. 8 - сечение Ж-Ж на фиг. 6.
Многоцелевой станок содержит продольно-подвижную стойку 1, поперечно-подвижный стол 2, вертикально-подвижную шпиндельную бабку 3 с горизонтальным шпинделем 4 и отдельно стоящий с боковой стороны инструментальный магазин 5 в виде бесконечной цепи 6 с автооператором 7 для смены инструмента из шпинделя 4 в магазин 5 и обратно. Автооператор 7 состоит из поворотной траверсы 8 с цилиндрическими направляющими 9, механизма 10 поворота траверсы 8, каретки 11 с захватом 12 инструмента, привода перемещения каретки 11 с двигателем 13 и редуктором 14 и механизмов 15, 16 поворота и выдвижения захвата 12.
Траверса 8 выполнена в виде корпуса, смонтированного на вертикальной оси 17, разделяющей корпус траверсы на левую укороченную часть 18 со стороны инструментального магазина и правую удлиненную часть 19 со стороны шпинделя 4, причем масса правой части корпуса траверсы 8 значительно больше массы левой части корпуса траверсы.
На нижней поверхности 20 левой части корпуса траверсы выполнен прилив 21 в виде платика с расточкой для установки двигателя 13 с редуктором 14 механизма перемещения каретки. Масса двигателя 13 с редуктором 14 и платиком 21 компенсирует разность массы левой части траверсы относительно правой части. Координата оси двигателя 13 с редуктором 14 выбрана относительно вертикальной оси поворота такой, что суммарный маховой момент левой части 18 траверсы при повороте относительно вертикальной оси в горизонтальной плоскости равен маховому моменту правой части 19 траверсы. Ось поворота 17 траверсы 8 установлена в одной вертикальной плоскости с горизонтальной осью механизма захвата 12 при фиксированном положении каретки 11 в нейтральном положении, и центр тяжести каретки 11 при повороте траверсы 8 расположен на оси 17 поворота траверсы в горизонтальной плоскости. Таким образом, за счет сбалансирования массы и махового момента левой части траверсы с правой частью суммарный центр тяжести автооператора в горизонтальной плоскости расположен на оси поворота и вся система автооператора в горизонтальной плоскости сбалансирована, тем самым система исключает дополнительные ударные нагрузки.
Одновременно двигатель 13 с редуктором 14 устанавливается на платике 21 параллельно вертикальной оси 17 поворота траверсы 8 так, что его габарит вписан по высоте в габарит траверсы. На выходном валу редуктора 14 насажена приводная звездочка 22 с дополнительной радиальной опорой 23, смонтированной во фланце 24, установленном на платике 21 корпуса траверсы 8.
На нижней поверхности 20 траверсы установлены на осях 25 ведомые звездочки 26. На приводной и ведомых звездочках на свободной нижней стороне траверсы 8 смонтирована втулочно-роликовая цепь 27, концы которой заделаны с помощью оси 28, насаженной в корпусе 29, закрепленном на корпусе каретки 11 автооператора.
На торце правой части 19 корпуса траверсы установлена планка 30 со скосом с помощью винтов 31 и штифтов 32, взаимодействующая с клиновой поверхностью базирующего платика 33, смонтированного на корпусе шпинделя 4 с помощью винтов 31 и штифтов 32. Траверса 8 смонтирована на вертикальной оси поворота 17 и фиксируется в верхней части с помощью конусных втулок 34, 35. Натяг обеспечивается с помощью винтов 36. Вертикальная ось 17 смонтирована в несущем корпусе 37 механизма поворота траверсы. В верхней части ось 17 установлена в радиальной опоре 38.
Радиальная опора смонтирована в крышке 39, закрепленной с помощью винтов 40 и штифтов 41 к несущему корпусу 37. В осевом направлении радиальная опора 38 фиксируется с помощью фланца 42 и колец 43.
В нижней части несущего корпуса 37 смонтирован механизм поворота траверсы 8, который состоит из шестерни 44, насаженной на конец оси 17 посредством конусной втулки 45 и винтов 46, обеспечивающих неподвижное соединение оси 17 с шестерней 44 и с корпусом траверсы 8. На корпусе 37 установлены две цилиндрические рейки 47, связанные с двумя гидроцилиндрами 10 механизма поворота траверсы 8 автооператора.
В нижней части ось поворота 17 установлена в радиальной опоре 48, которая расположена в несущем корпусе 37. В осевом направлении радиальная опора 48 замыкается крышкой 49, закрепленной в корпусе 37 с помощью винтов 50 и кольца 51.
Масса траверсы с кареткой автооператора воспринимается упорным шарикоподшипником 52, смонтированным на оси 17.
Упорный шарикоподшипник 52 упирается во втулку 53 с наружной резьбой. Втулка 53 насажена по резьбе во фланец 54, который закреплен на несущем корпусе с помощью винтов 50.
Несущий корпус 37 привода поворота траверсы закреплен на коробчатом корпусе 55 автооператора.
Устройство работает следующим образом.
В работе автооператора основными моментами являются: извлечение инструмента из магазина - положения (I-V), поворот автооператора 7 вокруг вертикальной оси 17. Извлечение инструмента из шпинделя-положения (VII-VIII), поворот захвата 12 на 180о - положение IX, загрузка нового инструмента в шпиндель (Х-ХI), поворот траверсы в исходное положение XII: возвращение инструмента в магазин (XIII-XVI).
При смене инструмента автооператор 7 находится в исходном положении I. Стойка 1 и шпиндельная бабка 4 находятся в зоне смены инструмента. После этого ходом каретки 11 из исходного положения по цилиндрическим направляющим 9 траверсы в сторону укороченной части 18 посредством привода перемещения в виде установленного на выполненном приливе 21 двигателя 13, редуктора 14, приводной звездочки 22 с радиальной опорой 23, смонтированной во фланце 24, и через установленные на осях 25 ведомые звездочки 26 и втулочно-роликовую цепь 27, концы которой заделаны с помощью оси 28, насаженной в корпусе 29, закрепленном на корпусе каретки 11, производится захват инструмента в магазине 5 (положение II).
Затем осуществляют извлечение инструмента захватом 12 автооператора из гнезда магазина 5 (положение III).
Перемещение каретки 11 автооператора вновь в зону ожидания по направляющим 9 (положение IV).
Возвращение захвата в исходное положение V.
Поворот траверсы автооператора на 90о вокруг вертикальной оси 17 (положениe VI), смонтированный в несущем корпусе 37 механизм поворота траверсы посредством установки верхней части оси 17 в радиальной опоре 38, которая смонтирована в крышке 39 и закреплена в корпусе 37 с помощью винтов 40 и штифтов 41.
В осевом направлении радиальная опора 38 фиксируется с помощью фланца 42 и колец 43.
Ось 17 в нижней части поворачивается в радиальной опоре 48, которая в осевом направлении замыкается крышкой 49, закрепленной в корпусе 37 с помощью винтов 50 и кольца 51 и упорном шарикоподшипнике 52, который замыкается на втулку 53, ввернутую в крышку 54, воспринимая вес траверсы 8 с кареткой автооператора. Поворот траверсы 8, смонтированной на оси 17, производится при зафиксированной в нейтральном положении каретке 11 от гидроцилиндров 10, штоки которых соединены с цилиндрическими рейками 47, которые сцепляются с зубчатым колесом 44, насаженном жестко на оси 17 с помощью конусной втулки 45, натяг производится посредством винтов 46.
Причем, если давление масла подается в левый гидроцилиндр 10, то в правом гидроцилиндре масло идет на слив через элементы торможения в конце хода, тем самым обеспечивается беззазорная передача - цилиндрические рейки 47 - зубчатое колесо 44.
Захват инструмента в шпинделе 4 перемещения каретки II (положение VII) осуществляется аналогично перемещению инструмента к магазину 5 (положение II) только по направляющим со стороны части траверсы 8, обращенной к шпинделю 4.
Извлечение инструмента из шпинделя 4 (положение VIII) выдвижением захвата 12, аналогично положению III.
Поворот захвата на 180о (положение IX).
Загрузка нового инструмента в шпиндель 4 (положение Х, аналогичное положению V).
Перемещение каретки 11 от шпинделя 4 в зону ожидания (положение XI, аналогичное положению IV).
Поворот траверсы 8 на 90о в исходное положение XII, аналогичное положению VI, только в обратном направлении.
Выдвижение захвата 12 с инструментом (положение XIII, аналогичное положению III, VIII).
Перемещение каретки 11 к магазину 5 (положение XIV).
Загрузка инструмента в магазин 5 (положение XV, аналогичное положению Х).
Перемещение каретки II в исходное положение XVI, аналогичное перемещению в положение XI.
Предлагаемое устройство в отличие от прототипа позволяет сократить время смены инструментов за счет улучшения динамики работы автооператора. (56) Патент США N 4773152, кл. В 23 Q 3/157, 1988.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической смены инструмента | 1989 |
|
SU1698035A1 |
| Многоцелевой станок | 1988 |
|
SU1648727A1 |
| МНОГОЦЕЛЕВОЙ СТАНОК С УСТРОЙСТВОМ АВТОМАТИЧЕСКОЙ СМЕНЫ ИНСТРУМЕНТА | 1994 |
|
RU2108218C1 |
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |
| Металлорежущий станок с автоматической сменой инструмента | 1978 |
|
SU770736A1 |
| Токарный вертикальный станок с ЧПУ и устройством автоматической смены инструмента | 1988 |
|
SU1636180A1 |
| Устройство автоматической смены инструмента | 1983 |
|
SU1117182A1 |
| Гибкий производственный модуль | 1986 |
|
SU1342668A1 |
| ОБРАБАТЫВАЮЩИЙ ЦЕНТР С ГИБРИДНОЙ КИНЕМАТИКОЙ | 2013 |
|
RU2572112C2 |
| Многооперационный станок портального типа | 1989 |
|
SU1742029A1 |

Изобретение относится к станкостроению, в частности к станкам с устройством автоматической смены инструмента для перенесения инструмента из магазина в шпиндель и обратно при их расположении во взаимно перпендикулярных плоскостях. Цель изобретения - повышение производительности за счет сокращения времени смены инструментов. Устройство состоит из продольно-подвижной стойки, поперечно-подвижного стола, вертикально-подвижной шпиндельной бабки 3 с горизонтальным шпиншделем 4 и инструментальным магазином 5 в виде бесконечной цепи 6 с автооператором 7. Автооператор 7 содержит поворотную траверсу с осью поворота и с направляющими для перемещения каретки, привод перемещения каретки и механизм захвата с горизонтальной осью вращения. Ось поворота траверсы расположена со стороны, противоположной размещению каретки и в одной вертикальной плоскости с осью механизма захвата при нейтральном положении каретки с возможностью разделения траверсы на уравновешенные части. На одной из частей траверсы параллельно оси поворота траверсы выполнен прилив, на котором размещен привод перемещения каретки. Для повышения точности базирования захвата автооператора относительно шпинделя 4 на торце траверсы со стороны шпинделя и на корпусе шпинделя 4 установлены планки со скосами с возможностью взаимодействия друг с другом. 1 з. п. ф-лы, 8 ил.